zcu102_2_PS端使用UART通信
UART的设置
本文档继承zcu102_1建立的工程,打开Vivado工程后,打开Block Design,双击zynq模块进入配置界面
在PS UltraScale+ Block Design页可以看到UART0和UART1已使能

点击图中的UART0或者UART1进入I/O Configuration页并打开UART设置

根据ug1182的说明,前述的2个UART接口通过CP2108 USB-to-Quad-UART bridge实现USB转串口功能,按照xtp435的说明安装转换芯片的驱动
在Windows 10的设备管理器中可以看到安装完成后的4个串口

其中Interface 0对应UART0,Interface 1对应UART1
之后根据xtp435的说明安装Tera Term用于串口调试
运行Hello World工程
该示例用于展示将UART接口用于向主机发送调试信息,仅用print函数即可
在Vivado工程的File菜单选择Launch SDK,新建uart_test工程,使用Hello World模板,点击Finish完成


打开uart_test工程的helloworld.c文件,注释掉无用代码
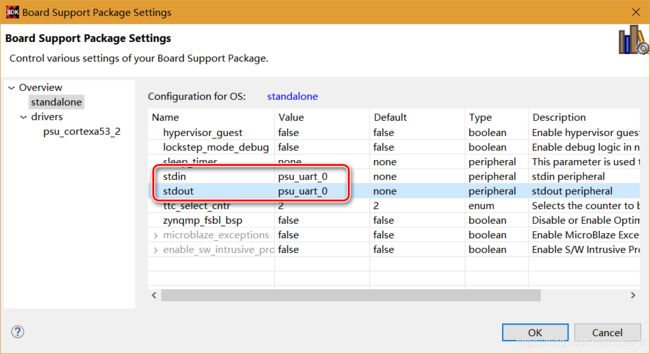
#include 在uart_test_bsp工程上右键菜单选择Board Support Package Settings

打开Board Support Packages Settings窗口,选择standalone页,可以看到stdin和stdout都连接至uart0
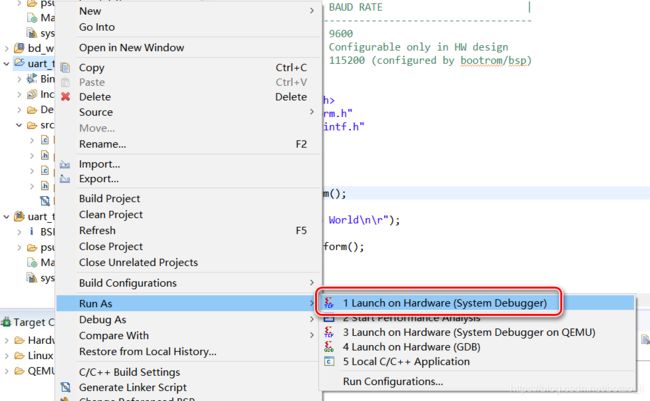
关闭窗口,在uart_test工程的右键菜单选择Build Project,编译工程
打开Tera Term软件,选择串口Interface 0

在Setup菜单选择

在弹出的串口设置菜单中进行如下设置

zcu102板卡上电,启动uart_test
在Tera Term界面出现Hello World字符

打开Board Support Packages Settings窗口,选择standalone页,将stdout都连接至uart1

按照前述方法运行uart_test程序,在Tera Term查看Interface 1的连接,即COM5
正确接收Hello World字符
以下内容参考system.mss内psu_uart_0或者psu_uart_1的Documentation和Import Examples
UART发送数据
新建uart_send工程,使用uart_test_bsp,同样使用Hello World模板

将helloworld.c原有代码改成如下
#include "xparameters.h"
#include "xuartps.h"
#include "xil_printf.h"
int main()
{
//使用UART0实现发送数据
XUartPs Uart_Ps;//uart对象
//查找uart配置
XUartPs_Config *Config;
Config = XUartPs_LookupConfig(XPAR_XUARTPS_0_DEVICE_ID);//ID来源于xparameters.h
if (Config == NULL)
{
//在bsp中设置为uart1负责stdout
print("failed XUartPs_LookupConfig\n\r");
return XST_FAILURE;
}
else
{
print("succeed XUartPs_LookupConfig\n\r");
}
//uart初始化
int Status;
Status = XUartPs_CfgInitialize(&Uart_Ps, Config, Config->BaseAddress);
if (Status != XST_SUCCESS)
{
print("failed XUartPs_CfgInitialize\n\r");
return XST_FAILURE;
}
else
{
print("succeed XUartPs_CfgInitialize\n\r");
}
//设置波特率
XUartPs_SetBaudRate(&Uart_Ps, 9600);
//发送字节
for (int i = 0; i < 10; ++i)
{
//0x30~0x39对应ASCII码值的0~9
XUartPs_SendByte(Config->BaseAddress, 0x30+i);//阻塞
}
//发送数组
u8 array[] = "\n\ruart_send by bt_";
XUartPs_Send(&Uart_Ps, array, sizeof(array));//非阻塞
return 0;
}
设置Tera Term的COM4为波特率9600(匹配上述代码)
设置COM5为波特率115200
运行uart_send程序,Tera Term显示如下:

UART接收数据
新建uart_recv工程,使用Hello World模板

将helloworld.c中原有代码改成如下:
#include "xparameters.h"
#include "xuartps.h"
#include "xil_printf.h"
#include "sleep.h"
int main()
{
//使用UART0实现发送数据
XUartPs Uart_Ps;//uart对象
//查找uart配置
XUartPs_Config *Config;
Config = XUartPs_LookupConfig(XPAR_XUARTPS_0_DEVICE_ID);//ID来源于xparameters.h
if (Config == NULL)
{
//在bsp中设置为uart1负责stdout
print("failed XUartPs_LookupConfig\n\r");
return XST_FAILURE;
}
else
{
print("succeed XUartPs_LookupConfig\n\r");
}
//uart初始化
int Status;
Status = XUartPs_CfgInitialize(&Uart_Ps, Config, Config->BaseAddress);
if (Status != XST_SUCCESS)
{
print("failed XUartPs_CfgInitialize\n\r");
return XST_FAILURE;
}
else
{
print("succeed XUartPs_CfgInitialize\n\r");
}
//接收缓冲
u8 buf[64];
//接收字节数
u32 recv_cnt = 0;
while (TRUE)
{
usleep(500000);//等待500ms
recv_cnt = XUartPs_Recv(&Uart_Ps, buf, 64);//接收数据
if (recv_cnt > 0)
{
//返回接收到的数据
xil_printf("%s", buf);
//清空缓冲
memset(buf, 0, 64);
}
}
return 0;
}
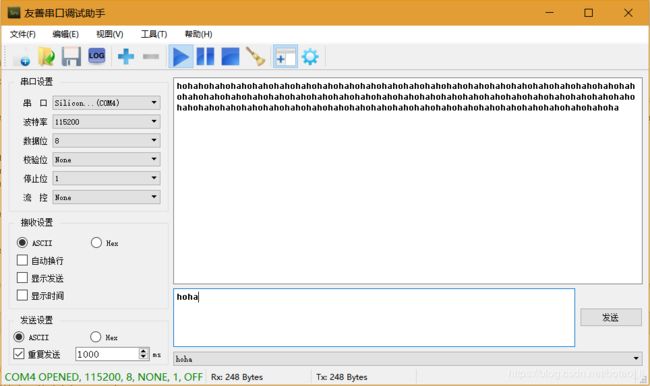
为了方便自动发送,于是使用友善串口调试助手进行测试,发现UART接收功能正确
关于UART接收的一些说明
本实验原本是打算使用通过中断来响应UART数据到达,再使用XUartPs_Recv进行接收,但是无论怎样实验都无法进入中断响应函数。
并且发现来自system.mss里的中断示例程序同样也无法正常进入中断响应函数。

无法确定是不是有一些在Vivado工程或者bsp里的设置不正确导致
根据以往嵌入式程序的开发经验,对于单线程运行的程序而言,持续接收数据如果使用中断来响应接收的话会占用更多的CPU时间(因为保存与重载现场的操作),相比较而言采用轮询的方式可以达成更高的运行效率。对于偶然突发的数据接收,使用中断接收相比较轮询接收,可以实现更快速的响应。