bounding box回归的原理学习——yoloV1
参考:
https://zhuanlan.zhihu.com/p/25236464
http://blog.csdn.net/williamyi96/article/details/77530948
http://blog.csdn.net/zijin0802034/article/details/77685438
https://leonardoaraujosantos.gitbooks.io/artificial-inteligence/content/object_localization_and_detection.html
一、逻辑理解
从逻辑上说明对bbox回归的原理的理解。
之前觉得bbox的回归是一个很难理解的地方:这些回归的坐标数字,依据在哪里?
其实回归的输入并不是这些预测的坐标数字,而是预测的坐标对应的feature map中的内容,这个内容与相对于ground truth进行对比,计算,是回归的根本依据。
通过不断的训练,得到了回归的参数,在预测时,网络产生了图像的feature map,对于任意一个预测框,背后对应了一个feature 区域,将学习到的参数与此feature区域进行运算,就会得到调整预测框的参数了。因为同类物体的特征应当相似。
二、yoloV1论文学习
(1) resizes the input image to 448 × 448,
(2) runs a single convolutional network on the image, and
(3) thresholds the resulting detections by the model’s confidence.
A single convolutional network simultaneously predicts multiple bounding boxes and class probabilities for those boxes.
对于输入的图片,resize到网络的输入所需要的大小,经过多重卷积处理,得到了7*7大小的feature map。里面的7x7的每个格子就是grid cell。
每个grid cell会负责预测B个bounding box(问题:怎么预测出来的?),以及对于每个类的条件概率。每个bounding box的预测内容包括有:box的信息:x,y,w,h,以及本bounding box包含有某类物体的置信度。含义如下:
—-x,y是相对于grid cell的左上角来说的box的中心位置,w,h是box的宽高,相对于整张图片的款高。
—-confidence的含义:如果这个box包含了任何一种物体,则定义为该box与ground truth中的任何一个box的iou的大小,如果该box不包含任何一个物体,则confidence为0。
—-每个grid cell还会预测C个不同类别的条件概率。即如果这个grid cell是包含有物体的,那么对于可能包含的不同物体的概率情况。
假设每个grid cell会预测2个box,需要检测的物体有20类,那么最后生成的向量size是7x7x(5*2+20)=1470。
loss function如下:
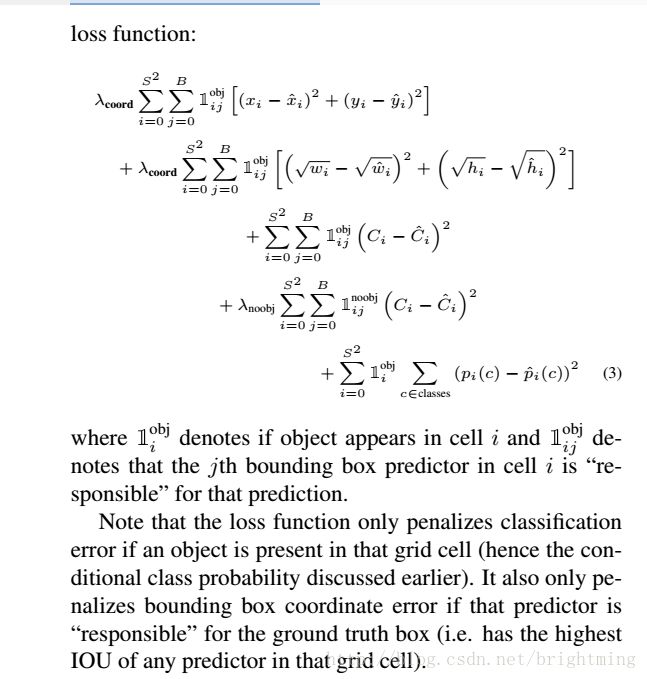
训练过程中的回归是如何进行的呢?
基本的逻辑就是对坐标+iou误差、分类误差进行修正。
在训练的时候,每个样本的ground truth的box是知道的,对应于相当于下采样后的的feature map,也能找到在feature map中对应的格子的位置。如果一个grid cell是该物体的中心位置,则这个grid cell负责预测这个物体;每个grid cell都预测了若干个box,其中会有一个box具有与ground truth的某个box有最大的iou,则由这个box负责调整box的位置(另外的预测的box就忽略了)。
可以想象,一开始的时候,权重是随机的,面对抽象出来的图像的feature信息,其预测的box的信息、confidence的信息、物体类别的条件概率都是随机的,经过了loss函数进行惩罚与优化,使得预测行为越来越好。取极端情况为例子加深理解:总是用同一张图片做训练,每次得到的图像的feature map都是一样的。一开始的时候,权重随机,权重与某个grid cell的运算的结果是随机,即每个grid cell对应的5*b+C的数据是随机的。网络对此情况进行优化,指导权重向某个方向优化。第二次看到还是一样的feature map,新的权重与某个grid cell对应的数据进行计算,就会得到更好的box位置和confidence,物体类别的信息。如此反复进行,直到权重参数调整到这样的情况,面对同样的grid cell,其计算出来的box的信息完全与ground box的位置符合,confidence=1,正确类别的条件概率为1。
问题:
可以看到修正box的时候,是针对训练的时候,权重与训练图片中的feature map的相应部分进行运算来进行调整的,即:如果在实际应用中,有一个物体,其与训练的图片中的物体很像,那么可以进行好的预测,如果是以一个没有见过的角度去看,那么由于训练时没有对这个角度的feature进行计算与优化,就不会预测好,跟遇到一个类别之外的物体没差别。所以,增加训练的样本的多角度很有必要。
同时一个grid cell虽然预测若干个box,但只会由那个与ground truth的任何box有最大交集的预测box来负责预测这个grid cell的情况,那么对于比较密集挨在一起物体的情况就会不能预测的现象出现:两只鸟靠的很近,它们的两个ground truth的box,都与某个grid cell有最大的iou,与其他的grid cell都没有相交,但因为这里有两只鸟,所以,这个gridcell预测的若干个box中,总会与两只鸟分别对应的两个ground truth的box的其中一个有更大的iou值,就会选到这个预测box,负责预测其中的一只鸟,对于另一只鸟,就会忽略。而由于鸟比较小,与其他的grid cell也没有相交,所以这另外的鸟就给忽略掉了,检测就会检测不出来。
yolov1源码学习
分析detection_layer.c
void forward_detection_layer(const detection_layer l, network net)
{
int locations = l.side*l.side;//7x7,side 是detection 层的参数
int i,j;
memcpy(l.output, net.input, l.outputs*l.batch*sizeof(float));
//if(l.reorg) reorg(l.output, l.w*l.h, size*l.n, l.batch, 1);
int b;
if (l.softmax){
for(b = 0; b < l.batch; ++b){
int index = b*l.inputs;
for (i = 0; i < locations; ++i) {
int offset = i*l.classes;
softmax(l.output + index + offset, l.classes, 1, 1,
l.output + index + offset);
}
}
}
//l.output的组织方式是:
//分成3块:第一块统一放置classes的信息,第二块统一放置每个box的confidence信息,
//第三块统一放置box的坐标信息
if(net.train){
float avg_iou = 0;
float avg_cat = 0;
float avg_allcat = 0;
float avg_obj = 0;
float avg_anyobj = 0;
int count = 0;
*(l.cost) = 0;
int size = l.inputs * l.batch;
memset(l.delta, 0, size * sizeof(float));
//一次训练同时处理batch张图片
for (b = 0; b < l.batch; ++b){
//某一张图片的开始,上面的make_detection_layer方法的assert方法
//验证了inputs的情况
int index = b*l.inputs;
//每张图片到最后的feature map大小是locations=S*S,如(7×7个)
for (i = 0; i < locations; ++i) {
//每个grid cell对应的truth的信息:1个confidence,4个坐标信息,相应的类别信息
int truth_index = (b*locations + i)*(1+l.coords+l.classes);
int is_obj = net.truth[truth_index];
for (j = 0; j < l.n; ++j) {
//预测的每个box中的confidence信息。参考l.output的组织方式
int p_index = index + locations*l.classes + i*l.n + j;
//先默认为该grid cell是no obj的
l.delta[p_index] = l.noobject_scale*(0 - l.output[p_index]);
*(l.cost) += l.noobject_scale*pow(l.output[p_index], 2);
avg_anyobj += l.output[p_index];
}
int best_index = -1;
float best_iou = 0;
float best_rmse = 20;
if (!is_obj){
//该grid cell没有物体,直接返回
//其cost就是那个noobject相应的计算结果
continue;
}
//第i个grid cell的classes预测信息的开始位置,classes的信息统一排在前面
int class_index = index + i*l.classes;
//论文中lossfunction的最后一项:
//计算该grid cell预测出来的每个class的概率信息与真实信息(对应的类别是1,其余为0.可以看ground truth信息组织的代码)的差值
for(j = 0; j < l.classes; ++j) {
l.delta[class_index+j] = l.class_scale * (net.truth[truth_index+1+j] - l.output[class_index+j]);
*(l.cost) += l.class_scale * pow(net.truth[truth_index+1+j] - l.output[class_index+j], 2);
if(net.truth[truth_index + 1 + j]) avg_cat += l.output[class_index+j];
avg_allcat += l.output[class_index+j];
}
//box的信息排在confidence,classes信息后面
box truth = float_to_box(net.truth + truth_index + 1 + l.classes, 1);
truth.x /= l.side;
truth.y /= l.side;
//判断哪个pred box与ground truth中的任何一个box
//的iou最大,则由该预测box负责对本grid cell
//进行预测
for(j = 0; j < l.n; ++j){
//参考l.output的组织方式
//跳过前面的classes和每个box的confidence的数据,到达box的坐标数据位置
int box_index = index + locations*(l.classes + l.n) + (i*l.n + j) * l.coords;
box out = float_to_box(l.output + box_index, 1);
//归一化
out.x /= l.side;
out.y /= l.side;
if (l.sqrt){
//表示里面的预测值w,h是经过sqrt操作的,
out.w = out.w*out.w;
out.h = out.h*out.h;
}
float iou = box_iou(out, truth);
//iou = 0;
float rmse = box_rmse(out, truth);
if(best_iou > 0 || iou > 0){
if(iou > best_iou){
best_iou = iou;
best_index = j;
}
}else{
if(rmse < best_rmse){
best_rmse = rmse;
best_index = j;
}
}
}
if(l.forced){
if(truth.w*truth.h < .1){
best_index = 1;
}else{
best_index = 0;
}
}
if(l.random && *(net.seen) < 64000){
best_index = rand()%l.n;
}
//得到最佳box
int box_index = index + locations*(l.classes + l.n) + (i*l.n + best_index) * l.coords;
int tbox_index = truth_index + 1 + l.classes;
box out = float_to_box(l.output + box_index, 1);
out.x /= l.side;
out.y /= l.side;
if (l.sqrt) {
out.w = out.w*out.w;
out.h = out.h*out.h;
}
float iou = box_iou(out, truth);
//printf("%d,", best_index);
int p_index = index + locations*l.classes + i*l.n + best_index;
//上面加了默认的无物体的情况
*(l.cost) -= l.noobject_scale * pow(l.output[p_index], 2);
*(l.cost) += l.object_scale * pow(1-l.output[p_index], 2);
//这个avg_obj没看到减去之前默认加的值
avg_obj += l.output[p_index];
//预测的每个box的confidence的值代表的是
//有多肯定这个box包含了一个物体,按论文的定义是
//期望的等于预测的box与ground truth box的iou.
//那么走l.rescore的分支是比较合理的。
l.delta[p_index] = l.object_scale * (1.-l.output[p_index]);
if(l.rescore){
l.delta[p_index] = l.object_scale * (iou - l.output[p_index]);
}
l.delta[box_index+0] = l.coord_scale*(net.truth[tbox_index + 0] - l.output[box_index + 0]);
l.delta[box_index+1] = l.coord_scale*(net.truth[tbox_index + 1] - l.output[box_index + 1]);
l.delta[box_index+2] = l.coord_scale*(net.truth[tbox_index + 2] - l.output[box_index + 2]);
l.delta[box_index+3] = l.coord_scale*(net.truth[tbox_index + 3] - l.output[box_index + 3]);
if(l.sqrt){
l.delta[box_index+2] = l.coord_scale*(sqrt(net.truth[tbox_index + 2]) - l.output[box_index + 2]);
l.delta[box_index+3] = l.coord_scale*(sqrt(net.truth[tbox_index + 3]) - l.output[box_index + 3]);
}
*(l.cost) += pow(1-iou, 2);
avg_iou += iou;
++count;
}
}
if(0){
float *costs = calloc(l.batch*locations*l.n, sizeof(float));
for (b = 0; b < l.batch; ++b) {
int index = b*l.inputs;
for (i = 0; i < locations; ++i) {
for (j = 0; j < l.n; ++j) {
int p_index = index + locations*l.classes + i*l.n + j;
costs[b*locations*l.n + i*l.n + j] = l.delta[p_index]*l.delta[p_index];
}
}
}
int indexes[100];
top_k(costs, l.batch*locations*l.n, 100, indexes);
float cutoff = costs[indexes[99]];
for (b = 0; b < l.batch; ++b) {
int index = b*l.inputs;
for (i = 0; i < locations; ++i) {
for (j = 0; j < l.n; ++j) {
int p_index = index + locations*l.classes + i*l.n + j;
if (l.delta[p_index]*l.delta[p_index] < cutoff) l.delta[p_index] = 0;
}
}
}
free(costs);
}
*(l.cost) = pow(mag_array(l.delta, l.outputs * l.batch), 2);
printf("Detection Avg IOU: %f, Pos Cat: %f, All Cat: %f, Pos Obj: %f, Any Obj: %f, count: %d\n", avg_iou/count, avg_cat/count, avg_allcat/(count*l.classes), avg_obj/count, avg_anyobj/(l.batch*locations*l.n), count);
//if(l.reorg) reorg(l.delta, l.w*l.h, size*l.n, l.batch, 0);
}
}这里需要对l.output的数据组织方式进行了解,否则阅读其取各种值的代码会无法理解。l.output是包含一批图片的输出结果,每一张的输出紧跟着前一张的输出的后面,对于一张图片的输出数据其组织方式如下:
1、第一部分是每个grid cell预测的指定class的条件概率:
一个grid cell如果预测20个class,则排列方式就是第一个grid cell预测的class_0,class_1..class_19的条件概率值,紧接着是第二个grid cell的预测值,直到所有的grid cell的对于各类别的条件概率值都排列完毕;
2、第二部分是每个grid cell预测的每个box的confidence的值:
同样,如果一个grid cell预测2个box,则就是confidence_box_0,confidence_box_1….
3、第三部分就是预测的各个box的坐标信息了:
按照x,y,w,h的方式排列。
整体的检测流程步骤很清晰:
1、循环处理一批中的每一张图片,对于每一张图片,进行以下处理:
2、先默认当做该grid cell 不包含物体,计算loss情况:lossfunction中的第4项;
3、取出对应的grid cell的truth box的数据
4、计算条件概率的loss情况,该数据只与grid cell有关,与预测的box无关,就是lossfunction中的最后一项
5、找出该grid cell预测的最好的那个box,叫做best_box
6、利用best_box计算box坐标的loss情况:loss function中的前两项,以及confidence的loss情况:loss function中的第3项;
如果某个grid cell不包含任何物体,其loss部分只有一个noobj的;否则会包含其他部分。
对着源码与论文,基本理解了其计算思路,但是对于里面如何进行优化的过程,还不是很清楚,主要是对于反向传播的代码级别的理解不够。