《OpenCV3编程入门》学习笔记7 图像变换(一)基于OpenCV的边缘检测
第7章 图像变换
7.1 基于OpenCV的边缘检测
7.1.1 边缘检测的一般步骤
1.滤波:边缘检测算法主要基于图像强度的一阶和二阶导数,导数对噪声敏感,所以要滤波
2.增强:确定图像各点邻域强度的变化值,将有显著变化的点凸显,可通过计算梯度幅值确定
3.检测:某些特定应用中梯度值较大点不为边缘点,通过阈值化方法检测进行取舍
7.1.2 canny算子
1.主要评价标准:
(1)低错误率:减少噪声误报
(2)高定位性:接近实际边缘
(3)最小响应:边缘只标识一次
2.步骤:
(1)消除噪声:高斯滤波
(2)计算梯度幅值和方向
1)运用一对卷积阵列分别作用于x和y方向

2)计算梯度幅值和方向(按照Sobel滤波器步骤进行)

(3)非极大值抑制:排除非边缘像素,仅保留一些细线条
(4)滞后阈值:高阈值和低阈值(推荐高低阈值比2:1到3:1)
1)像素幅值超过高阈值,保留为边缘像素
2)像素幅值小于低阈值,排除
3)像素幅值在高低之间,该像素连接到一个高于高阈值的像素时被保留
3.函数:Canny()函数
4.函数原型:
void Canny(InputArray image, OutputArray edges, double threshold1, double threshold2, int apertureSize=3, bool L2gradient=false)
5.参数说明:
(1)输入图像
(2)输出的边缘图
(3)第一个滞后性阈值,较小值用于边缘连接
(4)第二个滞后性阈值,较大值用于控制强边缘初始段
(5)应用Sobel算子的孔径大小,默认值3
(6)计算图像梯度幅值的标识,默认false
6.调用示例:
//将原图转成灰度图,降噪,用canny,将边缘图作为掩模拷贝到效果图上,得到彩色边缘图
#include运行效果:


7.1.3 sobel算子
1.主要用于边缘检测的离散微分算子(discrete differentiation operator),结合高斯平滑和微分求导,计算图像灰度函数的近似梯度
2.计算过程:
(1)分别在x和y两个方向求导
水平:图像I与奇数大小的内核进行卷积,如内核大小为3:

垂直:图像I与奇数大小的内核进行卷积,如内核大小为3:

(2)在图像每一点,结合以上两个结果求出近似梯度
 或
或![]()
3.函数:Sobel()函数
4.函数原型:
void Sobel(InputArray src, OutputArray dst, int ddepth, int dx, int dy, int ksize=3, double scale=1, double delta=0, int borderType=BORDER_DEFAULT)
5.参数说明:
(1)输入图像
(2)目标图像
(3)输出图像深度,支持src.depth()和ddepth的组合:

(4)x方向的差分阶数
(5)y方向的差分阶数
(6)Sobel核大小,取值:1、3(默认)、5、7,取值为1时一般使用3*1或1*3内核
内核大小为3时,Sobel内核可能有明显误差,Scharr函数更精确,内核为:

(7)计算导数时可选的缩放因子,默认1(无缩放)
(8)在结果存入目标图之前可选的delta值,默认0
(9)边界模式,默认BORDER_DEFAULT
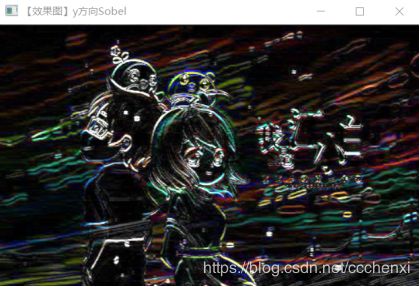
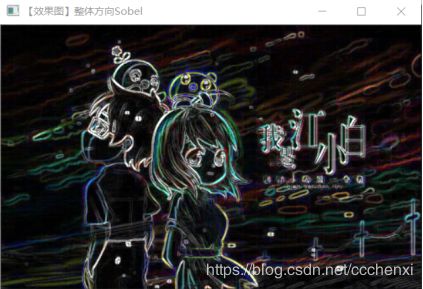
使用sobel()函数时,取【xorder=1,yorder=0,ksize=3】计算图像X方向导数,取【xorder=0,yorder=1,ksize=3】计算图像Y方向导数
6.调用示例:
#include运行效果:


7.1.4 Laplacian算子
1.二阶导数可以用来检测边缘, Laplacian算子是n维欧几里得空间中的一个二阶微分算子,定义为梯度grad的散度div,一幅图像减去它的Laplacian算子可以增强对比度
2.如果f是二阶可微的实函数,则f的拉普拉斯算子定义为笛卡尔坐标系xi中的所有非混合二阶偏导数求和:

3.函数:Laplacian()函数
4.函数原型:
void Laplacian(InputArray src, OutputArray dst, int ddepth, int ksize=1 , double scale=1, double delta=0, int borderType=BORDER_DEFAULT)
5.参数说明:
(1)输入图像
(2)输出的边缘图
(3)输出图像深度
(4)计算二阶导数的滤波器的孔径尺寸,大小必须为正奇数,默认1
(5)计算拉普拉斯值得时候可选的比例因子,默认1
(6)在结果存入目标图之前可选的delta值,默认0
(7)边界模式,默认BORDER_DEFAULT
6.函数主要利用sobel算子的运算,通过加上sobel算子运算的图像x方向和y方向上的导数,来得到载入图像的拉普拉斯变换,sobel算子如下:
ksize=1时,Laplacian()函数采用3*3孔径:

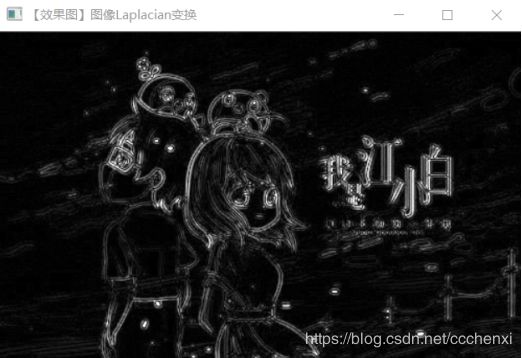
7.调用示例:
#include运行效果:

7.1.5 scharr滤波器
1.计算图像差分:Scharr()函数,与Sobel基本一样,没有ksize核大小:
Scharr(src,dst,ddepth,dx,dy,scale,delta,broderType)
=
Sobel(src,dst,ddepth,dx,dy,CV_SCHARR,scale,delta,borderType)
2.调用示例:
#include运行结果:




7.1.6 综合示例
/*
效果:
实现canny边缘检测,滑动条控制阈值
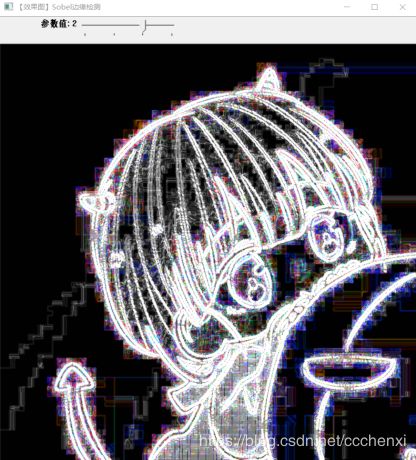
实现Sobel边缘检测,滑动条控制内核大小
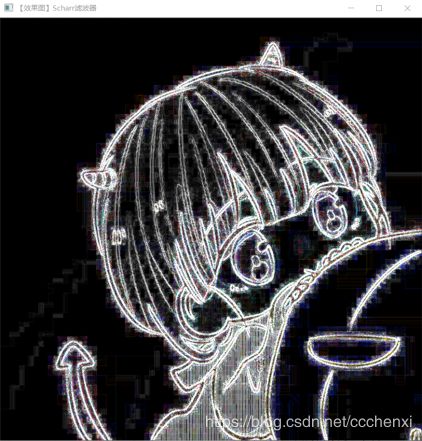
实现Scharr滤波器
*/
#include运行效果: