FreeRTOS如何结束和重新启动调度程序
大多数主机或桌面系统(比如Linux,Mac或Windows)都有一个正常的用例,你可以在早上启动操作系统,然后在晚上关闭它,然后你就离开机器。嵌入式系统是不同的:他们没有参加,他们应该“永远”运行。并非每个嵌入式系统都需要运行操作系统(或者在那个世界中:实时操作系统或RTOS),但这同样适用于:在RTOS启动后,并不意味着它将关闭并重新启动。在某种程度上,他们根本不支持“关闭”和“重启”功能。如果收集覆盖率信息,这将非常有用:

来自FreeRTOS应用程序的覆盖信息
对于FreeRTOS:如果我真的需要关闭RTOS并重新启动它会怎么样,因为默认情况下不支持。这就是本文的内容......
介绍
嵌入式系统与桌面系统根本不同:虽然不时关闭和重新启动台式机或笔记本电脑系统是正常的,但这不是计划或打算用于嵌入式系统:本质上它应该“始终”运行。从嵌入式系统的“主要”进一步可以看出这一点:通常主要永远不会返回并保持运行,如下所示:
| void main(void) { InitClocks(); InitPins(); InitDrivers(); for(;;) { AppRun(); } /* 从未离开主程序 */ } |
如果使用RTOS运行,类似的东西适用于嵌入式系统,其中看起来类似于:
| void main(void) { InitClocks(); InitPins(); InitDrivers(); CreateInitialTasks(); StartScheduler(); /* 调度程序永远不会终止,所以不应该到达这里 */ for(;;) { } /* 从未离开主程序 */ } |
为什么关机并重启?
显然,对于嵌入式RTOS而言,RTOS关闭或重启的需求可能不是最需要的。我仍然发现它非常有用:
- 在RTOS关闭后运行某些软件*是有意义的。例如,如果我收集覆盖率信息(请参阅“ 向Eclipse添加GNU覆盖工具 ”和“ 使用Eclipse Neon和ARM gcc 5在嵌入式目标上实现GNU代码覆盖率 ”),我不希望干扰最后一个进程以转储数据RTOS。另外,我需要独占访问系统资源,包括大量的堆栈空间:关闭RTOS可以让我恢复文件I / O操作所需的所有RAM和堆栈空间。
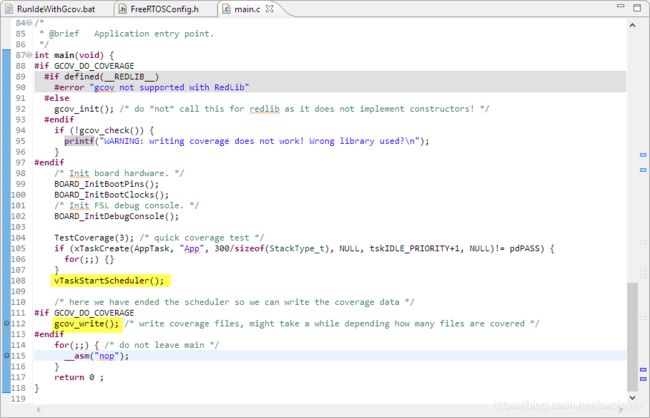
在调度程序关闭后写入gcov覆盖信息
- 在监听更新时运行RTOS是有意义的。在某些情况下,在执行更新时运行RTOS肯定是可能的,但在某些阶段我必须停止并重新启动它。这可以通过重置和重新启动系统来完成(例如,请参阅“ 如何使用软件重置ARM Cortex-M ”)。我发现它是关闭RTOS的更好方法,然后在RTOS之外进行更新并重启系统。

从任务结束FreeRTOS调度程序
- 另一个用例是低功耗应用。虽然FreeRTOS在低功耗模式下也很出色(参见“ 使用FreeRTOS实现低功耗:无空闲模式 ”),但如果可以关闭更多活动系统,应用程序甚至可以进入功耗更低的低功耗模式。因此,只有在我的应用程序的使用寿命期间才能运行RTOS才能有意义,而不是在其他部分运行RTOS,这为我提供了更大的灵活性和更低功耗的机会。
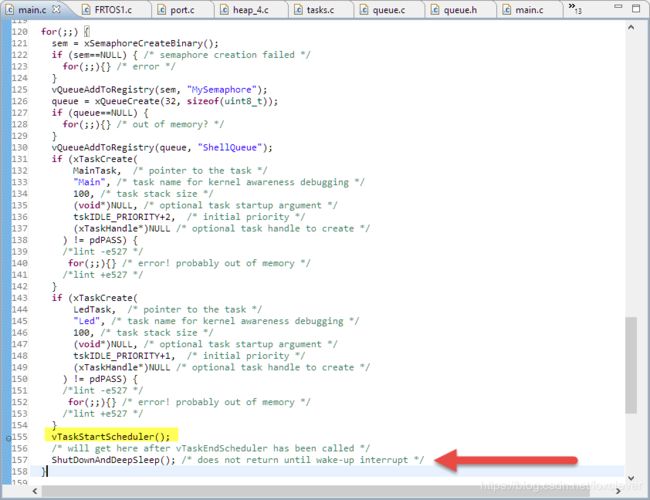
vTaskStartScheduler()后跟低功耗模式
所以我希望你明白为什么RTOS的关闭和重启是有意义的。包括FreeRTOS在内的大多数RTOS都能够“静音”调度程序(例如vTaskSuspendAll()),但仍然存在RTOS并使用系统资源。但是,如果需要,完全“删除”并重新启动它的能力将是很酷的事情。
FreeRTOS
FreeRTOS确实有一个调度程序启动函数(vTaskStartScheduler()),甚至在其API中有一个vTaskEndScheduler()函数:
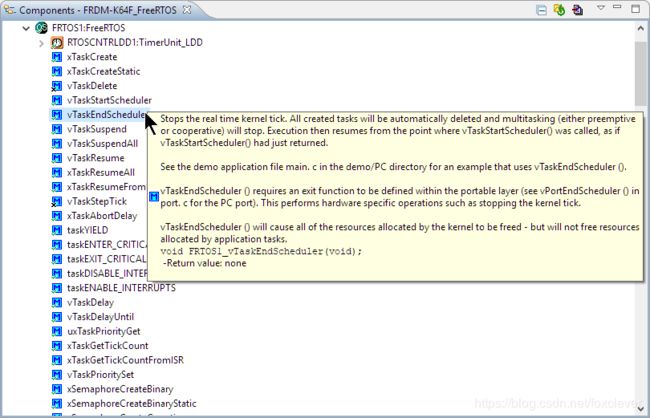
FreeRTOS vTaskEndScheduler()API函数
但正如论坛和API描述中所述,它仅支持PC端口(请参阅API说明):“ 注意:这仅适用于x86实模式PC端口。“
原来的FreeRTOS端口也是如此。我扩展的端口确实支持这个,我在ARM Cortex-M和HCS08应用程序中使用它:-)。
vTaskEndScheduler()和vTaskStartScheduler()
虽然RTOS已准备好将其关闭的API调用,但FreeRTOS在调用vTaskEndScheduler()之后没有适当的基础结构来重新启动RTOS。但这正是我想要的:在结束后重启RTOS。
要能够结束调度程序,必须在FreeRTOSConfig.h中将以下宏设置为1:
| #define INCLUDE_vTaskEndScheduler 1 |
挑战在于:在调度程序启动之后,在vTaskStartScheduler()调用之后立即返回代码并不容易。因为具有自己的堆栈的任务,加上FreeRTOS和M3的标准端口,M4和M7甚至会重置MSP堆栈指针(参见本论坛讨论)。因此,如果我想返回调度程序已启动的位置,我需要阻止重置ARM Cortex上的MSP堆栈指针。这就是我为FreeRTOS添加一个设置来配置它的原因:

重置MSP设置
这将设置以下配置:
| #ifndef configRESET_MSP #define configRESET_MSP (0) /*!< 1: reset MSP at scheduler start (Cortex M3/M4/M7 only); 0: do not reset MSP */ #endif |
将此设置设置为0,我的端口在调度程序起始点执行*不*重置MSP。

端口代码重置msp堆栈指针
这意味着并非完整的MSP堆栈可用于中断(参见“ ARM Cortex-M中断和FreeRTOS:第3部分 ”),但这通常也可以。
为了能够跳回到调度程序的起点,我使用了C库的一个很酷的功能:setjmp / longjmp(参见http://web.eecs.utk.edu/~huangj/cs360/360/notes/ Setjmp / lecture.html)。
首先,我需要一个跳转缓冲区变量:
| #if INCLUDE_vTaskEndScheduler #include static jmp_buf xJumpBuf; /* Used to restore the original context when the scheduler is ended. */ #endif |
在xPortStartScheduler()里面我设置了跳转缓冲区:
| #if INCLUDE_vTaskEndScheduler if(setjmp(xJumpBuf) != 0 ) { /* here we will get in case of a call to vTaskEndScheduler() */ __asm volatile( " movs r0, #0 \n" /* Reset CONTROL register and switch back to the MSP stack. */ " msr CONTROL, r0 \n" " dsb \n" " isb \n" ); return pdFALSE; } #endif vPortStartFirstTask(); /* Start the first task. */ /* Should not get here! */ return pdFALSE; |
如果建立跳转缓冲区,setjmp()返回0,并且在调用setjmp()的情况下返回!= 0将在vTaskEndScheduler()期间调用。
| void vTaskEndScheduler( void ) { /* Stop the scheduler interrupts and call the portable scheduler end routine so the original ISRs can be restored if necessary. The port layer must ensure interrupts enable bit is left in the correct state. */ portDISABLE_INTERRUPTS(); xSchedulerRunning = pdFALSE; vPortEndScheduler(); } |
然后,vPortEndscheduler()执行RTOS的所有清理和重置。重置要求不会造成调试器对任何RTOS认知的混淆:
| void vPortEndScheduler(void) { vPortStopTickTimer(); vPortInitializeHeap(); uxCriticalNesting = 0xaaaaaaaa; /* Jump back to the processor state prior to starting the scheduler. This means we are not going to be using a task stack frame so the task can be deleted. */ #if INCLUDE_vTaskEndScheduler longjmp(xJumpBuf, 1); #else for(;;){} /* wait here */ #endif } |
有了这个,调度程序优雅地终止,我又回到了主堆栈上:

在调用vTaskEndScheduler()之后在msp堆栈上
摘要
默认情况下,对于嵌入式目标,FreeRTOS不支持结束调度程序或在结束后重新启动调度程序。本文描述了ARM Cortex-M的一个端口,它实现了vTaskEndScheduler(),并能够在没有上电复位的情况下再次调用vTaskStartScheduler()。结束和启动调度程序对于低功耗应用程序非常有用,在应用程序的实时循环或引导加载程序应用程序中不需要RTOS的情况。该概念用于恩智浦的不同ARM Cortex-M内核,包括8/16位S08微控制器,但可以轻松用于任何其他微控制器架构。
参考链接
- 本文讨论的McuOnEclipse FreeRTOS端口:https://github.com/ErichStyger/McuOnEclipseLibrary/tree/master/lib/FreeRTOS
- 使用NXP MCUXpresso IDE在GitHub上使用gcov的示例项目:https://github.com/ErichStyger/mcuoneclipse/tree/master/Examples/MCUXpresso/FRDM-K64F/FRDM-K64F_gcov
- FreeRTOS网页:https://www.freertos.org/
- FreeRTOS vTaskEndScheduler API:https://www.freertos.org/a00133.html
- 关于FreeRTOS和MSP的恩智浦社区讨论:https://community.nxp.com/thread/493367
- 有关setjmp / longjmp的维基百科:https://en.wikipedia.org/wiki/Setjmp.h
- 关于ARM Cortex-M中断的教程系列:ARM Cortex-M,中断和FreeRTOS:第1部分
- MCUXpresso IDE v10.3.0:新的恩智浦MCUXpresso IDE V10.3.0版本
声明:本文为翻译文章,原文作者是:Erich Styger,原文网址为:https://mcuoneclipse.com/2019/01/20/freertos-how-to-end-and-restart-the-scheduler/
欢迎关注:
