进击的YOLOv3,目标检测网络的巅峰之作 | 内附实景大片
作者丨浩克匠心
研究方向丨基于深度学习的实时目标检测
知乎专栏丨计算视觉与深度学习的小屋
YOLOv3的前世今生
2015 年,R-CNN 横空出世,目标检测 DL 世代大幕拉开。
各路豪杰快速迭代,陆续有了 SPP,fast,faster 版本,至 R-FCN,速度与精度齐飞,区域推荐类网络大放异彩。
奈何,未达实时检测之基准,难获工业应用之青睐。
此时,凭速度之长,网格类检测异军突起,先有 YOLO,继而 SSD,更是摘实时检测之桂冠,与区域推荐类二分天下。然准确率却时遭世人诟病。
遂有 JR 一鼓作气,并 coco,推 v2,增加输出类别,成就 9000。此后一年,作者隐遁江湖,逍遥 twitter。偶获灵感,终推 v3,横扫武林!
准确率不再是短板
自从 YOLO 诞生之日起,它就被贴上了两个标签:
-
速度很快
-
不擅长检测小物体
而后者,成为了很多人对它望而却步的原因。
由于原理上的限制,YOLO 仅检测最后一层卷积输出层,小物体像素少,经过层层卷积,在这一层上的信息几乎体现不出来,导致难以识别。
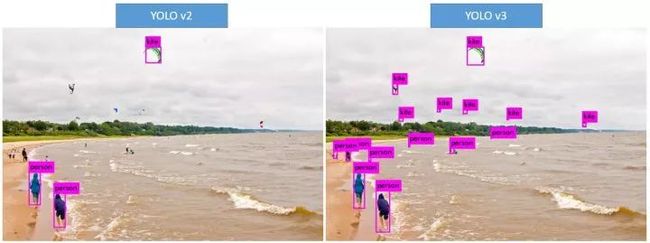
YOLOv3 在这部分提升明显,先看看小物体的识别。

▲ YOLOv3的识别结果
直观地看下和 YOLOv2 的对比图如下。可以看出,对于小物体的识别,提高非常明显。
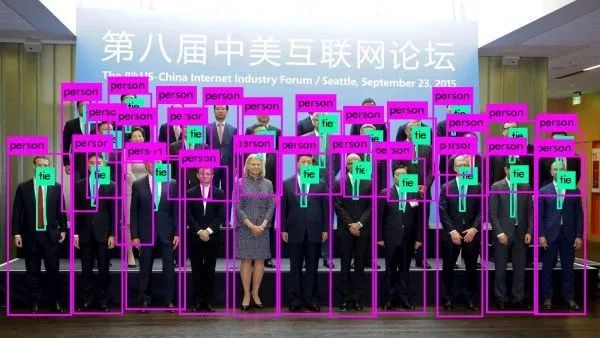
无论是传统的模式识别图像检测,还是基于 CNN 的视觉检测,对于紧凑密集或者高度重叠目标的检测通常是非常困难的。比如对合影的人群检测在 YOLOv2 上的结果:

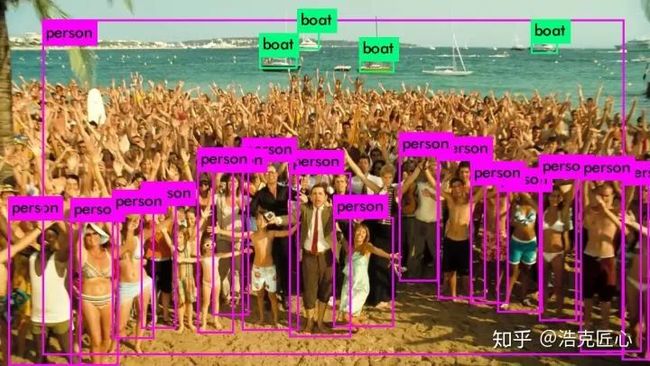
而下面是 v3 的结果
一次检测到图中 90% 的人,还增加了 tie(领带)这个新类别,非常惊艳!
再看看模型的泛化能力如何:
骷髅并不在训练数据集中,但是通过训练模型强大的泛化能力,自动将其归类到了人类(也算是最为合理的近似处理了)。
这在 YOLOv2 中是检测不到的。

那么,模型泛化能力很强的副作用,就是分类结果跑偏,比如下面这张 coser 的识别图,最左侧的人识别成了马:

训练和检测都很快
论文中做了详尽的对比。
和前辈们比,YOLO 的速度非常快,比 R-CNN 快 1000 倍,比 Fast R-CNN 快 100 倍。
和同辈们比,YOLOv3-608 检测准确率比 DSSD 更高,接近 FPN,但是检测时间却只用了后面两者的三分之一不到。
原因如论文中所说,它在测试时观察整张图像,预测会由图像中的全局上下文(global context)引导。它还通过单一网络评估做出预测,而不像 R-CNN 这种系统,一张图就需要成千上万次预测。

用了哪些黑科技?
1. 多级预测
终于为 YOLO 增加了 top down 的多级预测,解决了 YOLO 颗粒度粗,对小目标无力的问题。
v2 只有一个 detection,v3 一下变成了 3 个,分别是一个下采样的,feature map 为 13*13,还有 2 个上采样的 eltwise sum,feature map 为 26*26,52*52,也就是说 v3 的 416 版本已经用到了 52 的 feature map,而 v2 把多尺度考虑到训练的 data 采样上,最后也只是用到了 13 的 feature map,这应该是对小目标影响最大的地方。
在论文中从单层预测五种 boundingbox 变成每层 3 种 boundongbox。
2. loss不同
作者 v3 替换了 v2 的 softmax loss 变成 logistic loss,由于每个点所对应的 bounding box 少并且差异大,每个 bounding 与 ground truth 的 matching 策略变成了 1 对 1。
当预测的目标类别很复杂的时候,采用 logistic regression 进行分类是更有效的,比如在 Open Images Dataset 数据集进行分类。
在这个数据集中,会有很多重叠的标签,比如女人、人,如果使用 softmax 则意味着每个候选框只对应着一个类别,但是实际上并不总是这样。复合标签的方法能对数据进行更好的建模。
3. 加深网络
采用简化的 residual block 取代了原来 1×1 和 3×3 的 block(其实就是加了一个 shortcut,也是网络加深必然所要采取的手段)。
这和上一点是有关系的,v2 的 darknet-19 变成了 v3 的 darknet-53,为啥呢?就是需要上采样啊,卷积层的数量自然就多了,另外作者还是用了一连串的 3*3、1*1 卷积,3*3 的卷积增加 channel,而 1*1 的卷积在于压缩 3*3 卷积后的特征表示。
4. Router
由于 top down 的多级预测,进而改变了 router(或者说 concatenate)时的方式,将原来诡异的 reorg 改成了 upsample。
下一代YOLO长啥样?
1. mAP 会继续提高:随着模型训练越来越高效,神经网络层级的不断加深,信息抽象能力的不断提高,以及一些小的修修补补,未来的目标检测应用mAP会不断提升。
2. 实时检测会成为标配:目前所谓的“实时”,工业界是不认可的。为什么呢,因为学术圈的人,验证模型都是建立在 TitanX 或者 Tesla 这类强大的独立显卡上,而实际的潜在应用场景中,例如无人机/扫地/服务机器人/视频监控等,是不会配备这些“重型装备”的。所以,在嵌入式设备中,如 FPGA,轻量级 CPU 上,能达到的实时,才是货真价实的。
3. 模型小型化成为重要分支:类似于 tiny YOLO 的模型分支会受到更多关注。模型的小型化是应用到嵌入式设备的重要前提。而物联网机器人无人机等领域还是以嵌入式设备为主的。模型剪枝/二值化/权值共享等手段会更广泛的使用。
说点题外话
YOLO 让人联想到龙珠里的沙鲁(cell),不断吸收同化对手,进化自己,提升战斗力:YOLOv1 吸收了 SSD 的长处(加了 BN 层,扩大输入维度,使用了 Anchor,训练的时候数据增强),进化到了 YOLOv2;
吸收 DSSD 和 FPN 的长处,仿 ResNet 的 Darknet-53,仿 SqueezeNet 的纵横交叉网络,又进化到 YOLO 第三形态。
但是,我相信这一定不是最终形态。让我们拭目以待吧!

YOLOv3实景大片儿
这周忙里偷闲,把 darknet 的代码撸了一遍,里面有趣的东西很多。
能看出来作者是有野心的,YOLO 不只是一个目标检测应用,它还是一个完全基于 C 语言的通用神经网络架构,以及很多以此为基础的深度学习应用,比如基于 RNN 的莎士比亚戏剧剧本自动生成器:

基于策略网络的 darknet 版阿法狗(DarkGo):

基于 GAN 的 darknet 版 Deep Dream(Nightmare):

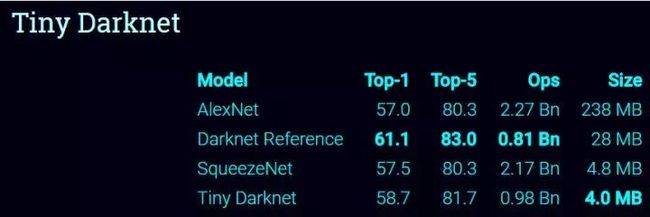
挑战 SqueezeNet 的压缩网络 TinyYOLO(Redmon 号称后者比前者更快、小、准)等等。
当然,做得最好的还是目标检测。darknet 自带有视频检测,及网络摄像头实时视频检测。
但是,目前网上介绍的 YOLO 的文章多是用的论文和 Github 工程自带的 sample 图片(dog,kite…),其实这不太公平。
在源代码基础上加了一点保存视频的代码(代码链接在文尾),生成了如下的视频,看看当 Mr Bean 遇到 YOLO 会产生什么样的化学反应!
▲ YOLOv3效果展示
查看高清版视频
https://zhuanlan.zhihu.com/p/36478097
注:本视频基于 coco 数据集,YOLOv3 cfg 和 weights。检测视频没有声音,音轨是后加的。
存在一些识别错误,但是整体来说,亮点很多。
截取几个瞬间
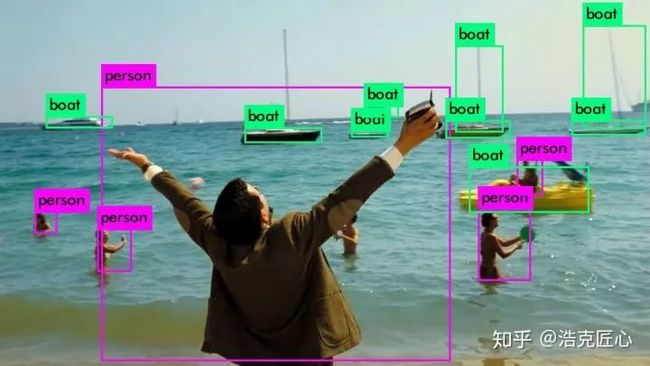
▲ 性能提升最大的是小物体或者远处的物体识别
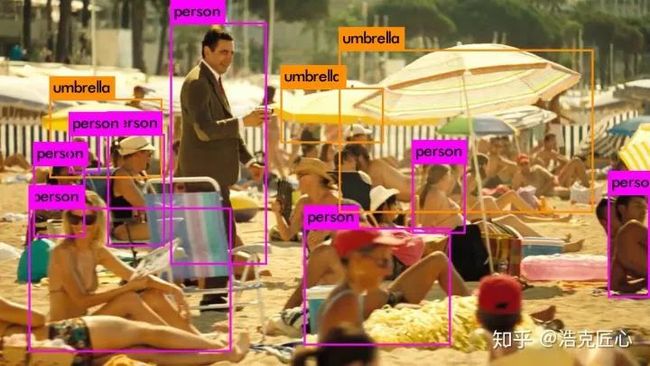
▲ 重叠遮挡物体的识别

▲ 运动模糊物体的识别
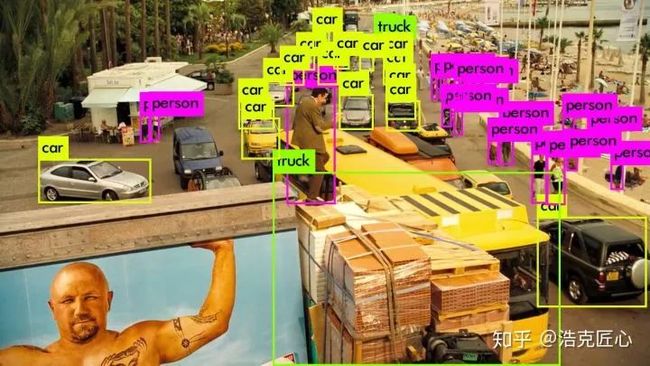
▲ 高密度汽车的识别
▲ 密集人群识别
相关链接
[1]. 论文
https://pjreddie.com/media/files/papers/YOLOv3.pdf
[2]. 翻译
https://zhuanlan.zhihu.com/p/34945787
[3]. 代码
https://github.com/pjreddie/darknet
[4]. 官网
https://pjreddie.com/darknet/yolo/
[5]. YouTube
https://www.youtube.com/watch?v=MPU2HistivI
[6]. 旧版
https://pjreddie.com/darknet/yolov2/
https://pjreddie.com/darknet/yolov1/
[7]. 源码分享
https://github.com/muyiguangda/darknet
[8]. YOLOv3在Windows下的配置(无GPU)
https://blog.csdn.net/baidu_36669549/article/details/79798587