三维重建学习(4):张正友相机标定程序实现(OpenCV)
前言
在前面的博客中( 三维重建学习(3):张正友相机标定推导),推到了张正友相机标定的数学原理,并给出了标定流程。OpenCV中已经封装好了一系列函数,我们使用这些函数可以更快捷地实现张正友相机标定。
程序流程
- 准备好一系列用来相机标定的图片;
- 对每张图片提取角点信息;
- 由于角点信息不够精确,进一步提取亚像素角点信息;
- 在图片中画出提取出的角点;
- 相机标定;
- 对标定结果评价,计算误差;
- 使用标定结果对原图片进行矫正;
上面这个流程大概看一遍有了个大概的认识就足够了。整个程序中都不涉及太深的数学,因为那些比较“恶心”的数学部分OpenCV都已经实现好了,我们直接调用就可以了。
关于其中的内外参矩阵等的参数不做赘述,前面的博客已经介绍过了: 三维重建学习(3):张正友相机标定推导。
流程说明
1. 准备图片
标定图片需要使用标定板在不同位置、不同角度、不同姿态下拍摄。在前面的博客中进行推导时,我们分析得知至少要有3张图片,才能有唯一解。通常以10~20张为佳。
通常都会购买专门的标定板,如果精度要求不高,也可以自己打印。
下面的图片摘自:http://blog.csdn.net/dcrmg/article/details/52939318
网上也有别人已经拍好的照片,下面是下载链接:https://pan.baidu.com/s/1mhG3mHU
程序中就直接使用这些现成的图片来测试了,省事。
2. 提取角点信息
OpenCV中自带了提取棋盘格中内角点的函数:findChessboardCorners()。
下面是函数原型:
CV_EXPORTS_W bool findChessboardCorners( InputArray image, Size patternSize, OutputArray corners,
int flags = CALIB_CB_ADAPTIVE_THRESH + CALIB_CB_NORMALIZE_IMAGE );函数说明:
这个函数的功能是确定输入图像中是否有棋盘格图案,并检测棋盘格的内角点。如果所有的内角点都找到了,那么函数返回一个非0值;如果没有找到所有的内角点,就会返回0。
参数说明:
image:输入的棋盘格图像,必须是8位的灰度或彩色图像。patternSize:每一幅棋盘格图片中,每行和每列角点的个数;如果用前面给出的那副图片,每行每列对应的角点数就是4和6。另外为了便于辨别方向,每行每列对应的角点数不能相同。corners:输出的角点坐标。通常用cv::Point2f向量来保存,vector。flags:默认为0,也可为其他参数。决定了内角点的不同查找方式。(默认写0即可,下面是官方文档中的给出的可选取值)
- CALIB_CB_ADAPTIVE_THRESH 使用自适应阈值(通过平均图像亮度计算得到)将图像转换为黑白图,而不是一个固定的阈值。
- CALIB_CB_NORMALIZE_IMAGE 在使用固定阈值或者自适应阈值进行二值化之前,先使用equalizeHist()来均衡化图像亮度。
- CALIB_CB_FILTER_QUADS 使用其他的准则(如轮廓面积,周长,方形形状)来去除在轮廓检测阶段检测到的错误方块。
3. 提取亚像素角点信息
有两个函数可以实现提取亚像素角点信息:cornerSubPix、find4QuadCornerSubpix。在提取棋盘格角点时两者的效果差不多,随便使用哪一个都行。
void cornerSubPix(InputArray image, InputOutputArray corners, Size winSize, Size zeroZone, TermCriteria criteria)参数说明:
image:输入的图像;corners:初始的角点坐标,同时也会作为亚像素角点坐标的输出;通常用cv::Point2f/Point2d向量来保存,vector。winSize:大小为搜索窗口的一半。zeroZone:死区的一般尺寸,死区为不对搜索区的中央位置做求和运算的区域。criteria:迭代的终止条件。
CV_EXPORTS bool find4QuadCornerSubpix( InputArray img, InputOutputArray corners, Size region_size )参数说明:
img:输入图像,最好是8位灰度图像,检测效率更高;corners:初始的角点坐标,同时也会作为亚像素角点坐标的输出;通常用cv::Point2f/Point2d向量来保存,vector。region_size:角点搜索窗口的大小。
采用这两个函数都可实现亚像素角点检测,精度差不多,后面程序中采用find4QuadCornerSubpix函数。
4. 画出角点
使用drawChessboardCorners函数。函数功能很简单,就是在图片中画出检测到的角点。
CV_EXPORTS_W void drawChessboardCorners( InputOutputArray image, Size patternSize, InputArray corners, bool patternWasFound )参数说明:
image:图像,8位灰度或彩色图像。patternSize:每一幅棋盘格图片中,每行和每列角点的个数。corners:初始的角点坐标,同时也会作为亚像素角点坐标的输出;通常用cv::Point2f/Point2d向量来保存,vector。patternWasFound:标志位,用来只是是否检测倒所有的棋盘内角点。true表示完整地检测到了所有内角点,函数会用直线将角点依次连接起来;false表示没有完整检测到所有内角点,函数会用红色圆圈标出检测到的内角点。
5. 相机标定
这里的标定函数是calibrateCamera,也是相机标定的核心了。
CV_EXPORTS_W double calibrateCamera( InputArrayOfArrays objectPoints,
InputArrayOfArrays imagePoints, Size imageSize,
InputOutputArray cameraMatrix, InputOutputArray distCoeffs,
OutputArrayOfArrays rvecs, OutputArrayOfArrays tvecs,
int flags = 0, TermCriteria criteria = TermCriteria(
TermCriteria::COUNT + TermCriteria::EPS, 30, DBL_EPSILON) );参数说明:
objectPoints:一系列点的三维坐标,即若干张图片中对应的若干个点的三维坐标。在使用时应该建立一个二维的vector,即vector。我们需要根据棋盘格每个黑白格子的长宽,计算出各个内角点的三维坐标。通常我们会取z=0,而只计算x和y坐标。imagePoints:若干张图片对应的若干的内角点的坐标,通常采用vector表示。imageSize:图像的像素尺寸大小。cameraMatrix:相机的内参矩阵,对应推导时的内参矩阵 A ,大小为 3×3 。distCoeffs:相机的畸变参数矩阵,有5个畸变参数: k1,k2,p1,p2,k3 ,,矩阵大小为 1×5 。rvecs:旋转向量,罗德里格旋转向量,是相机外参;因为有若干张图片,所以通常使用Mat类型的vector表示,vector。rvecs tvecs:位移向量,与旋转向量一样,也是相机外参,通常使用Mat类型的vector表示,vector。tvecs flags:表示标定时采用的算法。默认为0,其他有:
- CV_CALIB_USE_INTRINSIC_GUESS:使用该参数时,在cameraMatrix矩阵中应该有fx,fy,u0,v0的估计值。否则的话,将初始化(u0,v0)图像的中心点,使用最小二乘估算出fx,fy。
- CV_CALIB_FIX_PRINCIPAL_POINT:在进行优化时会固定光轴点。当CV_CALIB_USE_INTRINSIC_GUESS参数被设置,光轴点将保持在中心或者某个输入的值。
- CV_CALIB_FIX_ASPECT_RATIO:固定fx/fy的比值,只将fy作为可变量,进行优化计算。当CV_CALIB_USE_INTRINSIC_GUESS没有被设置,fx和fy将会被忽略。只有fx/fy的比值在计算中会被用到。
- CV_CALIB_ZERO_TANGENT_DIST:设定切向畸变参数(p1,p2)为零。
- CV_CALIB_FIX_K1,…,CV_CALIB_FIX_K6:对应的径向畸变在优化中保持不变。
- CV_CALIB_RATIONAL_MODEL:计算k4,k5,k6三个畸变参数。如果没有设置,则只计算其它5个畸变参数。
criteria:迭代的终止条件。
这个函数解决的就是我们以前推导的极大似然优化问题:
其中: m^(A,ki,kj,Ri,ti,Mj) 表示的是点 Mj 在第 i 幅图像上的投影。
A 是内参矩阵,对应函数中的参数
cameraMatrix;
m 是角点坐标,对应参数中的
imagePoints;
M 是角点对应的三维点坐标(在世界坐标系中);
R 是旋转矩阵,当然旋转矩阵可以使用Rodrigue公式转换成等价的旋转向量,即参数中的
rvecs;
t 是平移矩阵,对应参数中的
tvecs;其他还有一些畸变系数,根据情况可能考虑进去也可能忽略不计。
通过类比,不难理解这些参数的意义。
6. 评价标定结果
我们在进行相机标定时,本身要解决的是一个优化问题,而优化的对象就是角点与三维点投影到图像点坐标之间的差值,通过不断迭代,尽可能地最小化这个差值。我们对标定结果评价时,就是计算投影点与检测到的亚像素角点坐标的差值。由于是二维的,所以分别对 x 和 y 坐标求差值,再求平方根,即求L2范数。
先考虑如何对空间中的三维坐标点进行反向投影,使用函数projectPoints 实现:
CV_EXPORTS_W void projectPoints( InputArray objectPoints,
InputArray rvec, InputArray tvec,
InputArray cameraMatrix, InputArray distCoeffs,
OutputArray imagePoints,
OutputArray jacobian = noArray(),
double aspectRatio = 0 );参数说明:
objectPoints:一系列点的三维坐标,即若干张图片中对应的若干个点的三维坐标。在使用时应该建立一个二维的vector,即vector。我们需要根据棋盘格每个黑白格子的长宽,计算出各个内角点的三维坐标。通常我们会取z=0,而只计算x和y坐标。rvecs:旋转向量,罗德里格旋转向量,是相机外参;因为有若干张图片,所以通常使用Mat类型的vector表示,vector。rvecs tvecs:位移向量,与旋转向量一样,也是相机外参,通常使用Mat类型的vector表示,vector。tvecs cameraMatrix:相机的内参矩阵,对应推导时的内参矩阵 A ,大小为 3×3 。distCoeffs:相机的畸变参数矩阵,有5个畸变参数: k1,k2,p1,p2,k3 ,,矩阵大小为 1×5 。imagePoints:若干张图片对应的若干的内角点的坐标,通常采用vector表示。- 另外两个参数这里不会用到,跳过。
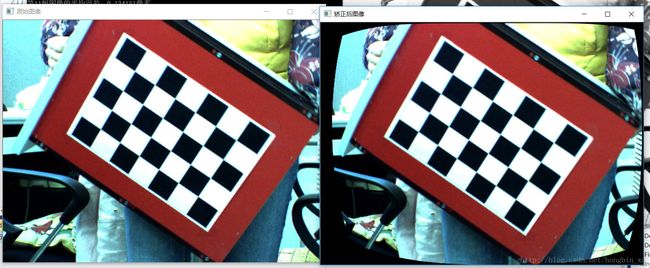
7. 矫正图像
使用前面求得的内参和外参以及畸变参数数据,可以对图像进行畸变矫正。
使用initUndistortRectifyMap和remap两个函数来实现。
initUndistortRectifyMap用来计算畸变映射,remap把求得的映射应用到图像上。
CV_EXPORTS_W void initUndistortRectifyMap( InputArray cameraMatrix, InputArray distCoeffs,
InputArray R, InputArray newCameraMatrix,
Size size, int m1type, OutputArray map1, OutputArray map2 );参数说明:
cameraMatrix:相机的内参矩阵;distCoeffs:相机的畸变参数构成的矩阵;R:可选的输入,是第一和第二相机坐标之间的旋转矩阵;newCameraMatrix:校正后的内参矩阵;size:摄像机采集的无失真的图像尺寸;m1type:定义map1的数据类型,可以是CV_32FC1或者CV_16SC2;map1和map2:分别对应 X 和 Y 坐标的重映射参数。
CV_EXPORTS_W void remap( InputArray src, OutputArray dst,
InputArray map1, InputArray map2,
int interpolation, int borderMode = BORDER_CONSTANT,
const Scalar& borderValue = Scalar());参数说明:
src:输入图像,原始有畸变的图像;dst:输出图像,校正后的图像;map1: X 坐标的映射;map2: Y 坐标的映射;interpolation:图像的插值方式;borderMode:边界填充方式;
完整程序实现
#include (0, j) = cv::Vec2f(image_points_calculated[j].x, image_points_calculated[j].y);
image_points_old_mat.at(0, j) = cv::Vec2f(image_points_old[j].x, image_points_old[j].y);
}
err = cv::norm(image_points_calculated_mat, image_points_old_mat, cv::NORM_L2);
err /= corner_points_counts;
total_err += err;
cout << "第" << i + 1 << "幅图像的平均误差:" << err << "像素" << endl;
fout << "第" << i + 1 << "幅图像的平均误差:" << err << "像素" << endl;
}
cout << "总体平均误差:" << total_err / image_num << "像素" << endl;
fout << "总体平均误差:" << total_err / image_num << "像素" << endl;
cout << "评价完成" << endl;
fout.close();
cv::Mat mapx = cv::Mat(image_size, CV_32FC1);
cv::Mat mapy = cv::Mat(image_size, CV_32FC1);
cv::Mat R = cv::Mat::eye(3, 3, CV_32F);
cout << "保存矫正图像" << endl;
string imageFileName;
std::stringstream StrStm;
for (int i = 0;i < image_num;i++)
{
cout << "Frame #" << i + 1 << endl;
cv::initUndistortRectifyMap(cameraMatrix, distCoefficients, R, cameraMatrix, image_size, CV_32FC1, mapx, mapy);
cv::Mat src_image = cv::imread(imgList[i].c_str(), 1);
cv::Mat new_image = src_image.clone();
cv::remap(src_image, new_image, mapx, mapy, cv::INTER_LINEAR);
imshow("原始图像", src_image);
imshow("矫正后图像", new_image);
StrStm.clear();
imageFileName.clear();
StrStm << i + 1;
StrStm >> imageFileName;
imageFileName += "_d.jpg";
cv::imwrite(imageFileName, new_image);
cv::waitKey(200);
}
cout << "保存结束" << endl;
cv::waitKey(0);
return 0;
} 运行结果
完整工程:http://download.csdn.net/download/hongbin_xu/10191899
参考链接:
http://blog.csdn.net/dcrmg/article/details/52939318