Ceph 学习——OSD读写流程与源码分析(一)
消息从客户端发送而来,之前几节介绍了 客户端下 对象存储、块存储库的实现以及他们在客户端下API请求的发送过程(Ceph学习——Librados与Osdc实现源码解析 、 Ceph学习——客户端读写操作分析 、 Ceph学习——Librbd块存储库与RBD读写流程源码分析)。当请求被封装后,通过消息发送模块(Ceph学习——Ceph网络通信机制与源码分析)将请求及其相关信息发送到服务端实现真正的对数据的操作。服务端的操作模块便是由OSD、OS模块完成的,这节先介绍OSD模块。
- OSD 模块主要的类
- OSD类
- PrimaryLogPG类
- PGBackend类
- OSD读写函数调用流程
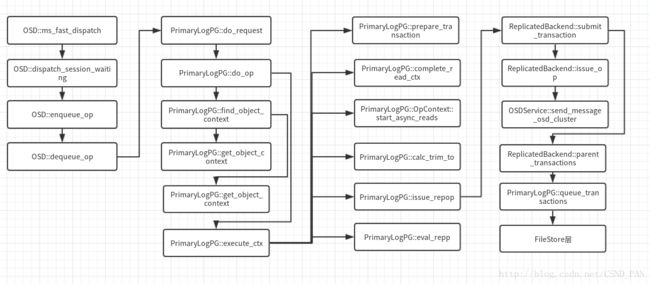
直接上图:
同样当前最新的版本,和之前的版本有所不同,有一些模块简化了,类的名字也改了。先介绍图中涉及的相关的类,然后在对类中具体函数主要调用流程进行分析。
OSD 模块主要的类
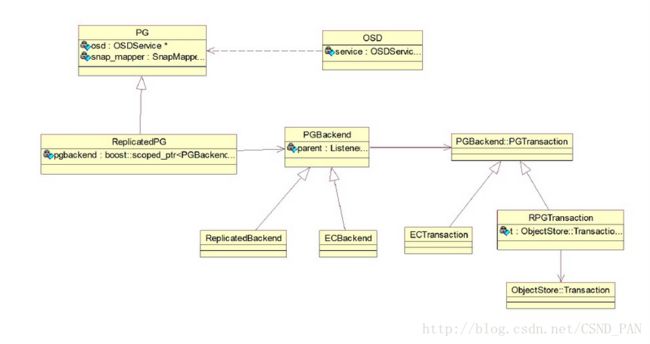
盗图:其中ReplicatedPG 在最新的版本中去掉了,更改为PrimaryLogPG类
OSD类
OSD和OSDService是核心类,他们直接在顶层负责一个OSD节点的工作,从客户端的得到的消息,就是先到达OSD类中,通过OSD类的处理,在调用PrimaryLogPG(之前为ReplicatedPG 类)类进行处理。该类中,在读写流程中的主要工作是消息(Message)封装为 RequestOp,检查epoch (版本)是否需要更新,并获取PG句柄,并做PG相关的检查,最后将请求加入队列。
PrimaryLogPG类
该类继承自PG类,PGBackend::Listener(该类是一个抽象类)类PG类处理相关状态的维护,以及实现PG层面的功能,核心功能是用boost库的statechart状态机来做PG状态转换。它实现了PG内的数据读写等功能。
PGBackend类
该类主要功能是将请求数据通过事务的形式同步到一个PG的其它从OSD上(注意:主OSD的操作PrimaryLogPG来完成)。
他有两个子类,分别是 ReplicatedBackend和ECBackend,对应着PG的的两种类型的实现。
OSD读写函数调用流程
1)OSD::ms_fast_dispatch 函数是接收消息Message的入口函数,他被网络模块的接收线程调用。主要工作是 检查service服务 、把Message封装为OpRequest类型、获取session、获取最新的OSdMap,最后dispatch_session_waiting,进入下一步。
void OSD::ms_fast_dispatch(Message *m)
{
FUNCTRACE();
if (service.is_stopping()) {//检查service,如果停止了直接返回
m->put();
return;
}
OpRequestRef op = op_tracker.create_request(m);//把Message封装为OpRequest类型
...
...
if (m->get_connection()->has_features(CEPH_FEATUREMASK_RESEND_ON_SPLIT) ||
m->get_type() != CEPH_MSG_OSD_OP) {
// queue it directly直接调用enqueue_op处理
enqueue_op(
static_cast(m)->get_spg(),
op,
static_cast(m)->get_map_epoch());
} else {
Session *session = static_cast(m->get_connection()->get_priv());//获取 session 其中包含了一个Connection的相关信息
if (session) {
{
Mutex::Locker l(session->session_dispatch_lock);
op->get();
session->waiting_on_map.push_back(*op);//将请求加如waiting_on_map的列表里
OSDMapRef nextmap = service.get_nextmap_reserved();//获取最新的OSDMAP
dispatch_session_waiting(session, nextmap);//该函数中 循环处理请求
service.release_map(nextmap);
}
session->put();
}
}
OID_EVENT_TRACE_WITH_MSG(m, "MS_FAST_DISPATCH_END", false);
} 2)OSD::dispatch_session_waiting 主要工作是循环处理队列waiting_on_map中的元素,对比OSDmap,以及获取他们的pgid,最后调用enqueue_op处理。
void OSD::dispatch_session_waiting(Session *session, OSDMapRef osdmap)
{
assert(session->session_dispatch_lock.is_locked());
auto i = session->waiting_on_map.begin();
while (i != session->waiting_on_map.end()) {//循环处理waiting_on_map中的元素
OpRequestRef op = &(*i);
assert(ms_can_fast_dispatch(op->get_req()));
const MOSDFastDispatchOp *m = static_cast<const MOSDFastDispatchOp*>(
op->get_req());
if (m->get_min_epoch() > osdmap->get_epoch()) {//osdmap版本不对应
break;
}
session->waiting_on_map.erase(i++);
op->put();
spg_t pgid;
if (m->get_type() == CEPH_MSG_OSD_OP) {
pg_t actual_pgid = osdmap->raw_pg_to_pg(
static_cast<const MOSDOp*>(m)->get_pg());
//osdmap->get_primary_shard(actual_pgid, &pgid)获取 pgid 该PG的主OSD
if (!osdmap->get_primary_shard(actual_pgid, &pgid)) {
continue;
}
} else {
pgid = m->get_spg();
}
enqueue_op(pgid, op, m->get_map_epoch());//获取成功则调用enqueue_op处理
}
if (session->waiting_on_map.empty()) {
clear_session_waiting_on_map(session);
} else {
register_session_waiting_on_map(session);
}
}3)OSD::enqueue_op 的主要工作是将求情加入到op_shardedwq队列中
void OSD::enqueue_op(spg_t pg, OpRequestRef& op, epoch_t epoch)
{
...
op->osd_trace.event("enqueue op");
op->osd_trace.keyval("priority", op->get_req()->get_priority());
op->osd_trace.keyval("cost", op->get_req()->get_cost());
op->mark_queued_for_pg();
logger->tinc(l_osd_op_before_queue_op_lat, latency);
//加入op_shardedwq队列中
op_shardedwq.queue(
OpQueueItem(
unique_ptr(new PGOpItem(pg, op)),
op->get_req()->get_cost(),
op->get_req()->get_priority(),
op->get_req()->get_recv_stamp(),
op->get_req()->get_source().num(),
epoch));
} 4)OSD::dequeue_op 调用函数进行osdmap的更新,调用do_request进入PG处理流程
void OSD::dequeue_op(
PGRef pg, OpRequestRef op,
ThreadPool::TPHandle &handle)
{
...
...
logger->tinc(l_osd_op_before_dequeue_op_lat, latency);
Session *session = static_cast<Session *>(
op->get_req()->get_connection()->get_priv());
if (session) {
//调用该函数进行 osdmap的更新
maybe_share_map(session, op, pg->get_osdmap());
session->put();
}
//正在是删除、直接返回
if (pg->is_deleting())
return;
op->mark_reached_pg();
op->osd_trace.event("dequeue_op");
//调用pg的do_request处理
pg->do_request(op, handle);
// finish
dout(10) << "dequeue_op " << op << " finish" << dendl;
OID_EVENT_TRACE_WITH_MSG(op->get_req(), "DEQUEUE_OP_END", false);
}
5)PrimaryLogPG::do_request该函数 主要你检查PG的状态,以及根据消息类型进行不同处理
void PrimaryLogPG::do_request(
OpRequestRef& op,
ThreadPool::TPHandle &handle)
{
...
// make sure we have a new enough map
//检查 osdmap
auto p = waiting_for_map.find(op->get_source());
...
//是否可以丢弃
if (can_discard_request(op)) {
return;
}
...
...
//PG还没有peered
if (!is_peered()) {
// Delay unless PGBackend says it's ok
//检查pgbackend是否可以处理这个请求
if (pgbackend->can_handle_while_inactive(op)) {
bool handled = pgbackend->handle_message(op);//可以处理,则调用该函数处理
assert(handled);
return;
} else {
waiting_for_peered.push_back(op);//不可以则加入waiting_for_peered队列
op->mark_delayed("waiting for peered");
return;
}
}
...
...
//PG处于Peered 并且flushes_in_progress为0的状态下
assert(is_peered() && flushes_in_progress == 0);
if (pgbackend->handle_message(op))
return;
// 根据不同的消息请求类型,进行相应的处理
switch (op->get_req()->get_type()) {
case CEPH_MSG_OSD_OP:
case CEPH_MSG_OSD_BACKOFF:
if (!is_active()) {//该PG状态 为非active状态
dout(20) << " peered, not active, waiting for active on " << op << dendl;
waiting_for_active.push_back(op);//加入队列
op->mark_delayed("waiting for active");
return;
}
switch (op->get_req()->get_type()) {
case CEPH_MSG_OSD_OP:
// verify client features 如果是cache pool ,操作没有带CEPH_FEATURE_OSD_CACHEPOOL的feature标志,返回错误信息
if ((pool.info.has_tiers() || pool.info.is_tier()) &&
!op->has_feature(CEPH_FEATURE_OSD_CACHEPOOL)) {
osd->reply_op_error(op, -EOPNOTSUPP);
return;
}
do_op(op);//调用do_op 处理
break;
case CEPH_MSG_OSD_BACKOFF:
// object-level backoff acks handled in osdop context
handle_backoff(op);
break;
}
break;
...
//各种消息类型
...
default:
assert(0 == "bad message type in do_request");
}
}6)PrimaryLogPG::do_op 函数很长很负责,这里着看相关调用流程好了,主要功能是解析出操作来,然后对操作的个中参数进行检查,检查相关对象的状态,以及该对象的head、snap、clone对象的状态等,并调用函数获取对象的上下文、操作的上下文(ObjectContext、OPContext)
void PrimaryLogPG::do_op(OpRequestRef& op)
{
FUNCTRACE();
// NOTE: take a non-const pointer here; we must be careful not to
// change anything that will break other reads on m (operator<<).
MOSDOp *m = static_cast(op->get_nonconst_req());
assert(m->get_type() == CEPH_MSG_OSD_OP);
//解析字段,从bufferlist解析数据
if (m->finish_decode()) {
op->reset_desc(); // for TrackedOp
m->clear_payload();
}
...
...
if ((m->get_flags() & (CEPH_OSD_FLAG_BALANCE_READS |
CEPH_OSD_FLAG_LOCALIZE_READS)) &&
op->may_read() &&
!(op->may_write() || op->may_cache())) {
// balanced reads; any replica will do 平衡读,则主从OSD都可以读取
if (!(is_primary() || is_replica())) {
osd->handle_misdirected_op(this, op);
return;
}
} else {
// normal case; must be primary 否则只能读取主OSD
if (!is_primary()) {
osd->handle_misdirected_op(this, op);
return;
}
}
if (!op_has_sufficient_caps(op)) {
osd->reply_op_error(op, -EPERM);
return;
}
//op中包含includes_pg_op该操作,则调用 do_pg_op(op)处理
if (op->includes_pg_op()) {
return do_pg_op(op);
}
// object name too long?
//检查名字是否太长
if (m->get_oid().name.size() > cct->_conf->osd_max_object_name_len) {
dout(4) << "do_op name is longer than "
<< cct->_conf->osd_max_object_name_len
<< " bytes" << dendl;
osd->reply_op_error(op, -ENAMETOOLONG);
return;
}
...
...
// blacklisted?
//发送请求的客户端是黑名单中的一个
if (get_osdmap()->is_blacklisted(m->get_source_addr())) {
dout(10) << "do_op " << m->get_source_addr() << " is blacklisted" << dendl;
osd->reply_op_error(op, -EBLACKLISTED);
return;
}
...
...
// missing object?
//head对象是否处于缺失状态
if (is_unreadable_object(head)) {
if (!is_primary()) {
osd->reply_op_error(op, -EAGAIN);
return;
}
if (can_backoff &&
(g_conf->osd_backoff_on_degraded ||
(g_conf->osd_backoff_on_unfound && missing_loc.is_unfound(head)))) {
add_backoff(session, head, head);
maybe_kick_recovery(head);
} else {
wait_for_unreadable_object(head, op);//加入队列,等待恢复完成
}
return;
}
// degraded object?
//顺序写 且head对象正在恢复状态
if (write_ordered && is_degraded_or_backfilling_object(head)) {
if (can_backoff && g_conf->osd_backoff_on_degraded) {
add_backoff(session, head, head);
maybe_kick_recovery(head);
} else {
wait_for_degraded_object(head, op);//加入队列,等待
}
return;
}
//顺序写,切处于数据一致性检查 scrub时期
if (write_ordered && scrubber.is_chunky_scrub_active() &&
scrubber.write_blocked_by_scrub(head)) {
dout(20) << __func__ << ": waiting for scrub" << dendl;
waiting_for_scrub.push_back(op);
op->mark_delayed("waiting for scrub");
return;
}
...
...
//若果是顺序写,并且该对象在该队列中
if (write_ordered && objects_blocked_on_cache_full.count(head)) {
block_write_on_full_cache(head, op);
return;
}
...
...
// io blocked on obc?
//检查对象是否被blocked
if (!m->has_flag(CEPH_OSD_FLAG_FLUSH) &&
maybe_await_blocked_head(oid, op)) {
return;
}
//调用find_object_context获取object_context
int r = find_object_context(
oid, &obc, can_create,
m->has_flag(CEPH_OSD_FLAG_MAP_SNAP_CLONE),
&missing_oid);
// hit.set 不为空 则设置
bool in_hit_set = false;
if (hit_set) {
if (obc.get()) {
if (obc->obs.oi.soid != hobject_t() && hit_set->contains(obc->obs.oi.soid))
in_hit_set = true;
} else {
if (missing_oid != hobject_t() && hit_set->contains(missing_oid))
in_hit_set = true;
}
if (!op->hitset_inserted) {
hit_set->insert(oid);
op->hitset_inserted = true;
if (hit_set->is_full() ||
hit_set_start_stamp + pool.info.hit_set_period <= m->get_recv_stamp()) {
hit_set_persist();
}
}
}
//agent_state 不为空
if (agent_state) {
if (agent_choose_mode(false, op))// 调用该函数进行选择agent的状态
return;
}
...
...
...
op->mark_started();
execute_ctx(ctx);//调用该函数,执行相关操作
utime_t prepare_latency = ceph_clock_now();
prepare_latency -= op->get_dequeued_time();
osd->logger->tinc(l_osd_op_prepare_lat, prepare_latency);
if (op->may_read() && op->may_write()) {
osd->logger->tinc(l_osd_op_rw_prepare_lat, prepare_latency);
} else if (op->may_read()) {
osd->logger->tinc(l_osd_op_r_prepare_lat, prepare_latency);
} else if (op->may_write() || op->may_cache()) {
osd->logger->tinc(l_osd_op_w_prepare_lat, prepare_latency);
}
// force recovery of the oldest missing object if too many logs
maybe_force_recovery();
}
7) PrimaryLogPG::find_object_context 函数主要根据 不同发情况 通过调用 PrimaryLogPG::get_object_context函数获取 对象上下文。
/*
* If we return an error, and set *pmissing, then promoting that
* object may help.
*
* If we return -EAGAIN, we will always set *pmissing to the missing
* object to wait for.
*
* If we return an error but do not set *pmissing, then we know the
* object does not exist.
*/
//获取一个对象的ObjectContext
int PrimaryLogPG::find_object_context(const hobject_t& oid,
ObjectContextRef *pobc,
bool can_create,
bool map_snapid_to_clone,
hobject_t *pmissing)
{
FUNCTRACE();
assert(oid.pool == static_cast(info.pgid.pool()));
// want the head?
if (oid.snap == CEPH_NOSNAP) {
ObjectContextRef obc = get_object_context(oid, can_create);//如果是想要原始对象(head)直接调用
if (!obc) {
if (pmissing)
*pmissing = oid;
return -ENOENT;
}
dout(10) << "find_object_context " << oid
<< " @" << oid.snap
<< " oi=" << obc->obs.oi
<< dendl;
*pobc = obc;
return 0;
}
hobject_t head = oid.get_head();
// we want a snap
//不是map_snapid_to_clone对象且,该snap快照已经被删除,直接返回-ENOENT
if (!map_snapid_to_clone && pool.info.is_removed_snap(oid.snap)) {
dout(10) << __func__ << " snap " << oid.snap << " is removed" << dendl;
return -ENOENT;
}
SnapSetContext *ssc = get_snapset_context(oid, can_create);//调用get_snapset_context对象来获取SnapSetContext对象。
if (!ssc || !(ssc->exists || can_create)) {
dout(20) << __func__ << " " << oid << " no snapset" << dendl;
if (pmissing)
*pmissing = head; // start by getting the head
if (ssc)
put_snapset_context(ssc);
return -ENOENT;
}
//如果是map_snapid_to_clone
if (map_snapid_to_clone) {
dout(10) << "find_object_context " << oid << " @" << oid.snap
<< " snapset " << ssc->snapset
<< " map_snapid_to_clone=true" << dendl;
if (oid.snap > ssc->snapset.seq) {//大于说明 该快照最新,osd还没完成相关信息的更新,直接返回head对象的上下文
// already must be readable
ObjectContextRef obc = get_object_context(head, false);//直接返回head对象的上下文
dout(10) << "find_object_context " << oid << " @" << oid.snap
<< " snapset " << ssc->snapset
<< " maps to head" << dendl;
*pobc = obc;
put_snapset_context(ssc);
return (obc && obc->obs.exists) ? 0 : -ENOENT;
} else {
vector 8)get_object_context 实际去获取上下文,先在缓存里面找,如果没有在调用函数去获取。另外在调用get_snapset_context获取SnapSetContext。
ObjectContextRef PrimaryLogPG::get_object_context(
const hobject_t& soid,
bool can_create,
const map<string, bufferlist> *attrs)
{
...
//先在缓存里面找
ObjectContextRef obc = object_contexts.lookup(soid);
osd->logger->inc(l_osd_object_ctx_cache_total);
if (obc) {
osd->logger->inc(l_osd_object_ctx_cache_hit);
dout(10) << __func__ << ": found obc in cache: " << obc
<< dendl;
} else {
dout(10) << __func__ << ": obc NOT found in cache: " << soid << dendl;
// check disk
bufferlist bv;
if (attrs) {
assert(attrs->count(OI_ATTR));
bv = attrs->find(OI_ATTR)->second;
} else {
int r = pgbackend->objects_get_attr(soid, OI_ATTR, &bv);//缓存没有就调用函数去获取
if (r < 0) {
if (!can_create) {
dout(10) << __func__ << ": no obc for soid "
<< soid << " and !can_create"
<< dendl;
return ObjectContextRef(); // -ENOENT!
}
dout(10) << __func__ << ": no obc for soid "
<< soid << " but can_create"
<< dendl;
// new object.
object_info_t oi(soid);
//调用get_snapset_context获取 SnapSetContext
SnapSetContext *ssc = get_snapset_context(
soid, true, 0, false);
assert(ssc);
obc = create_object_context(oi, ssc);
dout(10) << __func__ << ": " << obc << " " << soid
<< " " << obc->rwstate
<< " oi: " << obc->obs.oi
<< " ssc: " << obc->ssc
<< " snapset: " << obc->ssc->snapset << dendl;
return obc;
}
}
...
...
}
}9)
SnapSetContext *PrimaryLogPG::get_snapset_context(
const hobject_t& oid,
bool can_create,
const map<string, bufferlist> *attrs,
bool oid_existed)
{
Mutex::Locker l(snapset_contexts_lock);
SnapSetContext *ssc;
map10)该函数是由do_op调用的, 主要工作是检查对象状态和上下文相关信息的获取,并调用函数prepare _transactions 把操作封装到事务中。如果是读取操作,则调用相关读取函数(同步、异步)。如果是写操作,则 调用calc_trim_to计算是否将旧的PG log日志进行trim操作、 issue_repop(repop, ctx)向各个副本发送同步操作请求、eval_repop(repop)检查发向各个副本的同步操作请求是否已经reply成功
void PrimaryLogPG::execute_ctx(OpContext *ctx)
{
FUNCTRACE();
dout(10) << __func__ << " " << ctx << dendl;
ctx->reset_obs(ctx->obc);
ctx->update_log_only = false; // reset in case finish_copyfrom() is re-running execute_ctx
OpRequestRef op = ctx->op;
const MOSDOp *m = static_cast<const MOSDOp*>(op->get_req());
ObjectContextRef obc = ctx->obc;
const hobject_t& soid = obc->obs.oi.soid;
// this method must be idempotent since we may call it several times
// before we finally apply the resulting transaction.
ctx->op_t.reset(new PGTransaction);
if (op->may_write() || op->may_cache()) {
// snap
if (!(m->has_flag(CEPH_OSD_FLAG_ENFORCE_SNAPC)) &&//如果是对整个pool的快照操作
pool.info.is_pool_snaps_mode()) {
// use pool's snapc
ctx->snapc = pool.snapc;//设置为该值 pool的信息
} else {//如果是用户特定的快照 如RBD
// client specified snapc
ctx->snapc.seq = m->get_snap_seq();//设置为信息带的相关信息
ctx->snapc.snaps = m->get_snaps();
filter_snapc(ctx->snapc.snaps);
}
if ((m->has_flag(CEPH_OSD_FLAG_ORDERSNAP)) &&
ctx->snapc.seq < obc->ssc->snapset.seq) {//客户端的 snap序号小于服务端的 返回错误
dout(10) << " ORDERSNAP flag set and snapc seq " << ctx->snapc.seq
<< " < snapset seq " << obc->ssc->snapset.seq
<< " on " << obc->obs.oi.soid << dendl;
reply_ctx(ctx, -EOLDSNAPC);
return;
}
...
if (!ctx->user_at_version)
ctx->user_at_version = obc->obs.oi.user_version;
dout(30) << __func__ << " user_at_version " << ctx->user_at_version << dendl;
//若是读操作,给objectContext加上ondisk_read_lock锁
if (op->may_read()) {
dout(10) << " taking ondisk_read_lock" << dendl;
obc->ondisk_read_lock();
}
{
#ifdef WITH_LTTNG
osd_reqid_t reqid = ctx->op->get_reqid();
#endif
tracepoint(osd, prepare_tx_enter, reqid.name._type,
reqid.name._num, reqid.tid, reqid.inc);
}
int result = prepare_transaction(ctx);//将相关的操作封装到 ctx->op_t中 封装成事务
{
#ifdef WITH_LTTNG
osd_reqid_t reqid = ctx->op->get_reqid();
#endif
tracepoint(osd, prepare_tx_exit, reqid.name._type,
reqid.name._num, reqid.tid, reqid.inc);
}
if (op->may_read()) {
dout(10) << " dropping ondisk_read_lock" << dendl;
obc->ondisk_read_unlock();
}
bool pending_async_reads = !ctx->pending_async_reobc->ondisk_read_lock();ads.empty();
if (result == -EINPROGRESS || pending_async_reads) {
// come back later.
if (pending_async_reads) {
assert(pool.info.is_erasure());
in_progress_async_reads.push_back(make_pair(op, ctx));
ctx->start_async_reads(this);//如果是,则调用该函数 异步读取
}
return;
}
if (result == -EAGAIN) {
// clean up after the ctx
close_op_ctx(ctx);
return;
}
bool successful_write = !ctx->op_t->empty() && op->may_write() && result >= 0;
// prepare the reply
ctx->reply = new MOSDOpReply(m, 0, get_osdmap()->get_epoch(), 0,
successful_write, op->qos_resp);
// read or error?
if ((ctx->op_t->empty() || result < 0) && !ctx->update_log_only) {
// finish side-effects
if (result >= 0)
do_osd_op_effects(ctx, m->get_connection());
complete_read_ctx(result, ctx);//同步读取,
return;
}
ctx->reply->set_reply_versions(ctx->at_version, ctx->user_at_version);
assert(op->may_write() || op->may_cache());
// trim log?
calc_trim_to();//调用函数 计算是否将旧的PG log日志进行trim操作
...
...
issue_repop(repop, ctx);//向各个副本发送同步操作请求
eval_repop(repop);//检查发向各个副本的同步操作请求是否已经reply成功
repop->put();
}11)PrimaryLogPG::issue_repop函数 主要是把讲求发送到 副本OSD上进行处理
void PrimaryLogPG::issue_repop(RepGather *repop, OpContext *ctx)
{
FUNCTRACE();
const hobject_t& soid = ctx->obs->oi.soid;
dout(7) << "issue_repop rep_tid " << repop->rep_tid
<< " o " << soid
<< dendl;
repop->v = ctx->at_version;
if (ctx->at_version > eversion_t()) {
for (set12)该函数用于最终调用网络接口,把更新请求发送给从OSD,并调用queue_transactions 函数对该PG的主OSD上的实现更改。
void ReplicatedBackend::submit_transaction(
const hobject_t &soid,
const object_stat_sum_t &delta_stats,
const eversion_t &at_version,
PGTransactionUPtr &&_t,
const eversion_t &trim_to,
const eversion_t &roll_forward_to,
const vector &hset_history,
Context *on_local_applied_sync,
Context *on_all_acked,
Context *on_all_commit,
ceph_tid_t tid,
osd_reqid_t reqid,
OpRequestRef orig_op)
{
parent->apply_stats(
soid,
delta_stats);
vector 13) 调用的queue_transactions函数,会调用到os层。
调用的函数位于 PrinaryLogPG.h
void queue_transactions(vector其中 osd->store 定义为
ObjectStore *store;