OpenCV+CUDA入门教程之六---访问GpuMat的每一个元素
目录
一、CUDA极简入门教程
二、访问GpuMat的每个元素
一、CUDA极简入门教程
本部分只是CUDA 的一个超级简单且不完整的内容,关于CUDA配置和编程,请参考官方文档或其他教程。
1、Kernel
Kernel是在GPU上执行的函数,访问的数据都应该在显存中;函数没有返回值,需用void作为返回类型;语法和C++相同,也能使用C++的一些标准库函数(因为这些库函数有GPU实现,不过函数名字和参数相同而已)。kernel是函数的名字,可以随便改。
__global__ void kernel(参数1,参数2,...){
int i = threadIdx.x + blockIdx.x * blockDim.x; //列坐标
int j = threadIdx.y + blockIdx.y * blockDim.y; //行坐标
}__global__是Kernel的一个标识符,与之相对的还有__host__和__device__;由__host__标识的函数和普通函数无异,在CPU上执行;__device__标识的函数只能有__gloabal__标识的函数调用或者被其他用__device__标识的函数调用。
2、线程组织模型
GPU有很多个流处理器,每个流处理器相互独立,可以执行不同的代码;每个流处理器里面还有很多小核心,这些核心在同一时刻执行相同的代码,不过可以通过索引去访问不同的数据。在CUDA的线程模型里面,这些小核心对应的概念叫做Thread,每个Thread都可以计算出一个全局唯一从0开始的索引(索引可以是一维的,可以是二维的,甚至可以时是三维的)。
下面这图是在官方文档中Copy过来的图,图是二维线程模型的一个例子。
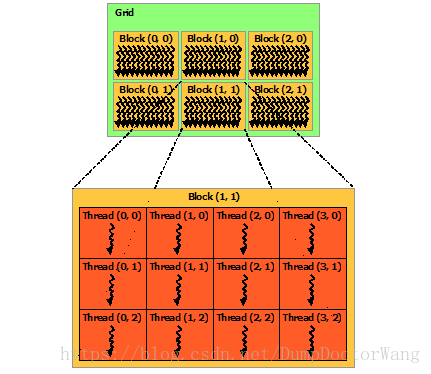
Grid由许多个Block组成,一个Block由许多Thread组成。
- 一维:Block的索引为(b_x),Thread的索引是(t_x)
- 二维:Block的索引为(b_x, b_y),Thread的索引是(t_x, t_y)
- 三维:Block的索引为(b_x, b_y, b_z),Thread的索引是(t_x, t_y, t_z)
b_x, b_y, b_z分别是Block在Grid里的x、 y、 z坐标,分别对应blockIdx.x、blockIdx.y、blockIdx.z。t_x, t_y, t_z分别是Thread在Block里的x、 y、z坐标,分别对应.x、threadIdx.y、threadIdx.z。每个Block在x、 y、z三个方向的大小是blockDim.x、blockDim.y、blockDim.z;每个Grid在x、 y、z三个方向的大小是gridDim.x、gridDim.y、gridDim.z。
blockIdx、threadIdx、blockDim、gridDim是kernel程序中的内置变量。
故对于一维线程模型(Block是一维的),Thread的全局索引(t_x)就可以使用如下代码来计算:
int t_x = threadIdx.x + blockIdx.x*blockDim.x;对于二维线程模型(Block是二维的),Thread的全局索引(t_x, t_y)就可以使用如下代码来计算:
int t_x = threadIdx.x + blockIdx.x * blockDim.x; // 列坐标
int t_y = threadIdx.y + blockIdx.y * blockDim.y; // 行坐标对于三维线程模型(Block是三维的),Thread的全局索引(t_x, t_y, t_z)就可以使用如下代码来计算:
int t_x = threadIdx.x + blockIdx.x * blockDim.x;
int t_y = threadIdx.y + blockIdx.y * blockDim.y;
int t_z = threadIdx.z + blockIdx.z * blockDim.z;3、第一个CUDA程序,一维线程模型示例
Kernel函数的调用形式为:函数名<<
// 命名为main.cu
#include
#include
#include
#include
#include
#include
using namespace std;
#define SIZE 100
// 检查cuda函数的返回值,出错的时候抛出异常
#define CE(status,error_msg) \
if (status != cudaSuccess) \
{\
char err_buffer[2048];\
sprintf(err_buffer,"第%d行: %s,错误详细信息>> %s\n",__LINE__,error_msg,cudaGetErrorString(status));\
throw runtime_error(err_buffer);\
}
/**
* Keernel。计算c=a+b
* @param a 数组a
* @param b 数组b
* @param c 数组c
*/
__global__ void add_kernel(int *a, int *b, int *c){
int id = threadIdx.x + blockIdx.x*blockDim.x; // 获取当前thread的索引
if(id>>(dev_a,dev_b,dev_c);
// 等待Kernel执行完
CE(cudaThreadSynchronize(),"同步失败");
// 从显存中把数据复制回内存
CE(cudaMemcpy(c,dev_c, size * sizeof(int),cudaMemcpyDeviceToHost),"复制数据失败");
// 释放显存
CE(cudaFree(dev_a),"释放内存失败");
CE(cudaFree(dev_b),"释放内存失败");
CE(cudaFree(dev_c),"释放内存失败");
}
int main() {
std::cout << "Hello, World!" << std::endl;
const size_t size = SIZE;
int a[size],b[size],c[size];
for(int i=0;i CMakeLists.txt
cmake_minimum_required(VERSION 3.0)
project(OCSample)
set(CUDA_USE_STATIC_CUDA_RUNTIME ON) #这一句解决 cannot find -lopencv_dep_cudart
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${CMAKE_SOURCE_DIR})
find_package(CUDA REQUIRED)
message(STATUS "CUDA版本: ${CUDA_VERSION}")
message(STATUS " 头文件目录:${CUDA_INCLUDE_DIRS}")
message(STATUS " 库文件列表:${CUDA_LIBRARIES}")
set(CUDA_NVCC_FLAGS -G;-g;-std=c++11) # nvcc flags
include_directories(${CUDA_INCLUDE_DIRS})
CUDA_ADD_EXECUTABLE(main main.cu)
target_link_libraries(main ${CUDA_LIBRARIES})二、访问GpuMat的每个元素
要访问GpuMat的每一个元素,实现自定义的算法,就得自己重新实现一个Kernel,然后把GpuMat作为参数传进去。但实际上,为了提高程序性能,一般不直接使用GpuMat作为参数,而是使用它的精简版PtrStepSz或者PtrStep代替。
- Block数量只能多不能少,否则有的像素访问不到。
- 观察全局Thread索引是怎么算的。
- 在Kernel里面一定要判断是否越界。当然,rows和cols分别是threadsPerBlock.x和threadsPerBlock.y的整倍数时,不需要判断。
- 访问src的一个元素的方法是src(行坐标, 列坐标)。
// main.cu
#include "common.h"
//---------------------CUDA头文件----------------
#include
#include
#include
//---------------------CUDA头文件----------------
/**
* CUDA kernel,在GPU上执行的函数。
* 上千个线程都是执行这个函数,每个Thread根据全局id作为坐标来访问像素
* @param src 类型是PtrStepSz,相当于是GpuMat的精简版
*/
__global__ void kernel(GPU::PtrStepSz src){
int i = threadIdx.x + blockIdx.x * blockDim.x; // thread在x方向的全局索引,也就是列坐标
int j = threadIdx.y + blockIdx.y * blockDim.y; // thread在y方向的全局索引,也就是行坐标
if (i ==0 && j==0)
printf("Grid size: (%d, %d)\n", gridDim.x, gridDim.y); //可用printf来debug
if(j
kernel<<>>(gpuMat);
// 从显存把数据下载到内存
Mat local;
gpuMat.download(local);
// 显示
imshow("s",local);
imwrite("s.jpg",local);
waitKey(0);
return 0;
}
kernel的参数是PtrStepSz
,类型uchar3是个结构体,有三个分量x,y,z。为什么使用uchar3呢,因为gpuMat的类型是CV_8UC3,就是每个元素有三个分量都是uchar这种类型的,当使用uchar3作为PtrStepSz的元素类型时,src(j,i)刚好返回第(j,i)个像素的引用。再举一个例子,如果gpuMat的类型是CV_32FC2(每个元素有两个float),那么,kenel的参数类型就应该为PtrStepSz 或者PtrStep 。
我使用cmake编译,CMakeLists.txt如下(common.cpp是个空文件,也可以写你自己的代码):
cmake_minimum_required(VERSION 3.0)
project(OCSample)
set(CUDA_USE_STATIC_CUDA_RUNTIME ON) #这一句解决 cannot find -lopencv_dep_cudart
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${CMAKE_SOURCE_DIR})
find_package(CUDA REQUIRED)
message(STATUS "CUDA版本: ${CUDA_VERSION}")
message(STATUS " 头文件目录:${CUDA_INCLUDE_DIRS}")
message(STATUS " 库文件列表:${CUDA_LIBRARIES}")
set(CUDA_NVCC_FLAGS -G;-g;-std=c++11) # nvcc flags
include_directories(${CUDA_INCLUDE_DIRS})
set(OpenCV_DIR "/usr/local/opencv343-cuda90/share/OpenCV") # 指定OpenCV安装路径来区分不同的OpenCV版本
find_package(OpenCV REQUIRED)
set(OpenCV_LIB_DIR ${OpenCV_INSTALL_PATH}/lib)
message(STATUS "OpenCV版本: ${OpenCV_VERSION}")
message(STATUS " 头文件目录:${OpenCV_INCLUDE_DIRS}")
message(STATUS " 库文件目录:${OpenCV_LIB_DIR}")
message(STATUS " 库文件列表:${OpenCV_LIBS}")
include_directories(${OpenCV_INCLUDE_DIRS})
link_directories(${OpenCV_LIB_DIR})
CUDA_ADD_EXECUTABLE(main main.cu common.h common.cpp)
target_link_libraries(main ${OpenCV_LIBS} ${CUDA_LIBRARIES})编译运行上述代码,最后可得到下图
注:实际上这种一个Thread处理一个像素,对显卡的性能浪费非常严重,要想更高效的使用自定义算法,请参考CUDA官方的文档。