Ceres库和g2o库的使用
1.Ceres库
Ceres库向通用的最小二乘问题的求解,定义优化问题,设置一些选项,可通过Ceres求解。 Ceres求解的最小二乘问题最一般形式为:
minx12∑ipi(||fi(xi1,⋯xin)||2),s.t.lj≤xj≤uj m i n x 1 2 ∑ i p i ( | | f i ( x i 1 , ⋯ x i n ) | | 2 ) , s . t . l j ≤ x j ≤ u j
在Ceres问题中,我们将定义优化变量 x x 和每个代价函数 fi f i , 再调用Ceres进行求解。可以使用高斯牛顿法或者列文伯格-马夸克特方法进行梯度下降,并设定梯度下降条件,Ceres会在优化之后将最优估计值返回。
假设有一个方程的曲线:
y=exp(ax2+bx+c)+w y = e x p ( a x 2 + b x + c ) + w
其中 a,b,c a , b , c 是曲线的参数, w w 为高斯噪声,这是一个非线性模型。假如我们有 N N 个关于 x,y x , y 的观测数据点,想根据这些数据点求出曲线的参数。那么我们可以根据下面的最小二乘问题以估计曲线参数:
mina,b,c12∑Ni=1||yi−exp(ax2i+bxi+c)||2 m i n a , b , c 1 2 ∑ i = 1 N | | y i − e x p ( a x i 2 + b x i + c ) | | 2
通过代码求得以上结果:
#include for(int i=0;idouble x=i/100.0;
x_data.push_back(x);
y_data.push_back(exp(a*x*x+b*x+c)+rng.gaussian(w_sigma));
cout<<"x_data[i]"<<""<//构建最小二乘问题
ceres::Problem problem;
for(int i=0;i//向问题中添加误差项,使用自动求导,
//模板参数:误差类型,输出维度,输入维度,数值参照前面struct写法
new ceres::AutoDiffCostFunction1,3>(
new Test_ceres(x_data[i],y_data[i]) ),
nullptr,//核函数,这里不使用,所以为空
abc //待估计参数
);
}
//配置求解器
ceres::Solver::Options option;
option.linear_solver_type=ceres::DENSE_QR;//增量方程如何求解,利用高斯牛顿法还是马夸克—列文伯格等
option.minimizer_progress_to_stdout=true;//输出到cout
ceres::Solver::Summary summary; //优化信息
chrono::steady_clock::time_point t1=chrono::steady_clock::now();//计算前的时间
ceres::Solve(option,&problem,&summary);//开始计算
chrono::steady_clock::time_point t2=chrono::steady_clock::now();//计算后的时间
chrono::duration<double> time_used=chrono::duration_castdouble>>(t2-t1);//求解一共所花的时间
cout<<"solve time cost = "<"seconds."<//输出结果
cout<cout<<"estimated a,b,c=";
for (auto a:abc) cout<"";
cout<return 0;
} 利用opencv生成100个带高斯噪声的数据,随后利用Ceres拟合,Ceres的用法如下:
1.定义了目标函数模型。定义方法为类。在类中使用了模板参数的()运算符,成为一个拟函数。
2.调用AddResidualBlock将误差项添加到目标函数中。由于优化需要梯度,在这里选择Auto Diff,即自动求导。
3.自动求导需要指定误差项和优化变量的维度,误差是标量,维度为1;优化的是a,b,c三个量,维度为3,。
4.设定后问题之后,调用solve函数进行求解,在options里可以选择配置。
2.g2o库
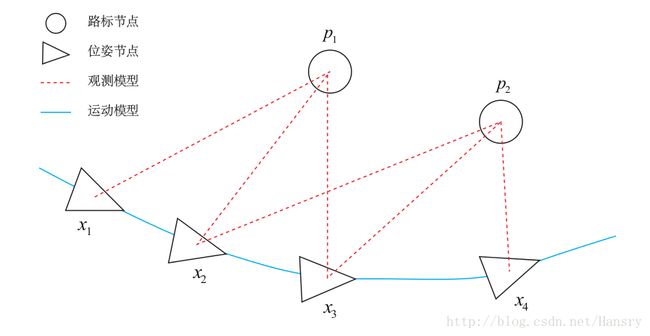
图优化,是把优化问题表现成图的一种方式,这里的图是图论意义上的图。一个图由若干个顶点,以及连着这些顶点的边组成。在这里,我们用顶点表示优化变量,而用边表示误差项。
构建图优化例子。用三角形表示相机位姿节点,用圆形表示路标点,它们构成了图优化的顶点。实线表示相机的运动模型,虚线表示观测模型,构成了图优化的边。
为了使用g2o,首先要将曲线拟合问题抽象成图优化。这个过程中,只要记住节点为优化变量,边为误差项即可。曲线拟合的图优化问题可以画成以下形式:
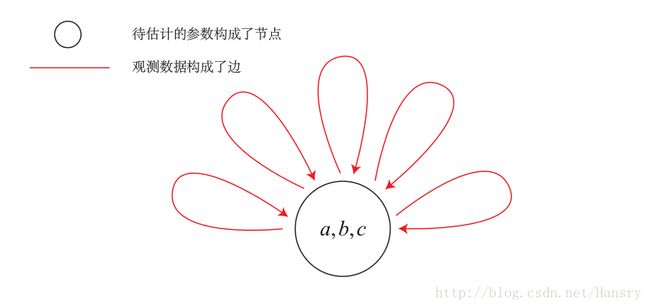
曲线拟合中,上述二乘问题参数a,b,c为优化变量,节点,带噪声数据点为误差项,即边。一元边,只有一个顶点,自己连自己。但是一条边可以连很多个点,代表这个误差项与多少个优化变量有关。
#include for ( int i=0; idouble x = i/100.0;
x_data.push_back ( x );
y_data.push_back (
exp ( a*x*x + b*x + c ) + rng.gaussian ( w_sigma )
);
cout<" "<// 构建图优化,先设定g2o
typedef g2o::BlockSolver< g2o::BlockSolverTraits<3,1> > Block; // 每个误差项优化变量维度为3,误差值维度为1
Block::LinearSolverType* linearSolver = new g2o::LinearSolverDense(); // 线性方程求解器
Block* solver_ptr = new Block( linearSolver ); // 矩阵块求解器
// 梯度下降方法,从GN, LM, DogLeg 中选
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg( solver_ptr );
// g2o::OptimizationAlgorithmGaussNewton* solver = new g2o::OptimizationAlgorithmGaussNewton( solver_ptr );
// g2o::OptimizationAlgorithmDogleg* solver = new g2o::OptimizationAlgorithmDogleg( solver_ptr );
g2o::SparseOptimizer optimizer; // 图模型
optimizer.setAlgorithm( solver ); // 设置求解器
optimizer.setVerbose( true ); // 打开调试输出
// 往图中增加顶点
CurveFittingVertex* v = new CurveFittingVertex();
v->setEstimate( Eigen::Vector3d(0,0,0) );
v->setId(0);
optimizer.addVertex( v ); //只有一个点
// 往图中增加边
for ( int i=0; inew CurveFittingEdge( x_data[i] );
edge->setId(i);
edge->setVertex( 0, v ); // 设置连接的顶点
edge->setMeasurement( y_data[i] ); // 观测数值
edge->setInformation( Eigen::Matrix<double,1,1>::Identity()*1/(w_sigma*w_sigma) ); // 信息矩阵:协方差矩阵之逆
optimizer.addEdge( edge );
}
// 执行优化
cout<<"start optimization"<100);
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_castdouble>>( t2-t1 );
cout<<"solve time cost = "<" seconds. "<// 输出优化值
Eigen::Vector3d abc_estimate = v->estimate();
cout<<"estimated model: "<return 0;
}
3.小结
Ceres定义误差项求曲线拟合问题自然直观很多,本事即是一个优化库。提供了基于模板元的自动求导和运行时数值求导。
g2o,在SLAM过程中,当相机位姿以李代数表示时,误差项关于相机位姿导数的计算,容易发现,g2o提供了大量的顶点和边的类型,非常便于相机位姿估计问题。提供了运行时数值求导。