RTthread学习笔记————第3章 内核基础
-
内核基础
内核是操作系统最基础也是最重要的部分。图 3-1 为 RT-Thread 内核架构图,内核处于硬件层
之上,内核部分包括内核库、实时内核实现。
-
RT-Thread 内核及底层结构

内核库是为了保证内核能够独立运行的一套小型的类似 C 库 [1] 的函数实现子集。这部分根据编
译器自带 C 库的情况会有些不同,当使用 GNU GCC 编译器时,会携带更多的标准 C 库实现。实时内核的实现包括:对象管理、线程管理及调度器、线程间通信管理、时钟管理及内存管理
等等,内核最小的资源占用情况是 3KB ROM,1.2KB RAM。
注:
C 库:也叫 C 运行库(C Runtime Library),它提供了类似“strcpy”、“memcpy”等函数,
有些也会包括“printf”、“scanf”函数的实现。RT-Thread Kernel Service Library 仅提供内核用到
的一小部分 C 库函数实现,为了避免与标准 C 库重名,在这些函数前都会添加上 rt_前缀。
-
RTthread启动流程
一般了解一份代码大多从启动部分开始,同样这里也采用这种方式,先寻找启动的源头,因为
MDK-ARM 的用户程序入口为 main()函数,位于 main.c 文件中。系统启动后先从汇编代码
startup_stm32f103xe.s 开始运行,然后跳转到 C 代码,进行 RT-Thread 系统功能初始化,最后进入
用户程序入口 main()。
为了在进入main()之前完成RT-Thread系统功能初始化,我们使用了MDK的扩展功能$Sub$$和
$Super$$。可以给 main 添加$Sub$$的前缀符号作为一个新功能函数$Sub$$main,这个$Sub$$main
可以先调用一些要补充在 main 之前的功能函数(这里添加 RT-Thread 系统初始化功能),再调用
$Super$$main 转到 main()函数执行,这样可以让用户不用去管 main()之前的系统初始化操作。
关于$Sub$$和$Super$$扩展功能的使用,详见 ARM® Compiler v5.06 for µVision® armlink User
Guide。

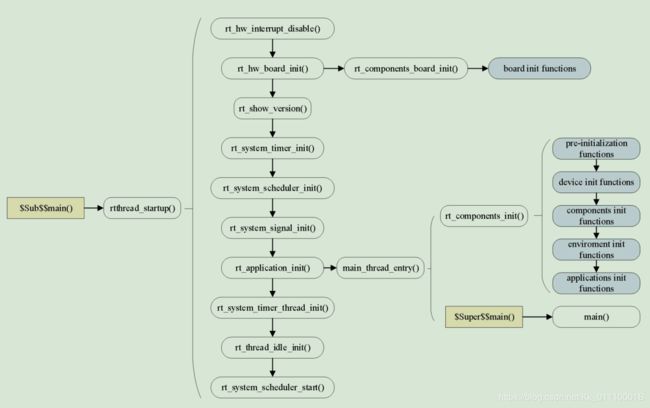
在这里$Sub$$main 函数仅仅调用了 rtthread_startup()函数。RT-Thread 支持多种平台和多种编
译器,而 rtthread_startup()函数是 RT-Thread 规定的统一入口点,所以$Sub$$main 函数只需调用
rtthread_startup()函数即可(例如采用 GNU GCC 编译器编译的 RT-Thread,就是直接从汇编启动代
码部分跳转到 rtthread_startup()函数中,并开始第一个 C 代码的执行)。
流程图
-
RT-Thread 自动初始化机制
自动初始化机制是指初始化函数不需要被显式调用,只需要在函数定义处通过宏定义的方式进
行申明,就会在系统启动过程中被执行。
例如在串口驱动中调用一个宏定义告知系统初始化需要调用的函数,代码如下:

示例代码最后的 INIT_BOARD_EXPORT(rt_hw_usart_init)表示使用自动初始化功能,按照这种
方式,rt_hw_usart_init()函数就会被系统自动调用,那么它是在哪里被调用的呢?流程框图中有两个函数:rt_components_board_init()与 rt_components_init(),其后的带底色方
框内部的函数表示被自动初始化的函数,其中:rt_components_board_init()函数执行的比较早,主要初始化相关硬件环境,执行这个函数时将
会遍历通过 INIT_BOARD_EXPORT(fn) 申明的初始化函数表,并调用各个函数。
rt_components_init()函数会在操作系统运行起来之后创建的 main 线程里被调用执行,这个时候
硬件环境和操作系统已经初始化完成,可以执行应用相关代码。rt_components_init()函数会遍历通
过剩下的其他几个宏申明的初始化函数表。
- “board init functions”为所有通过 INIT_BOARD_EXPORT(fn) 申明的初始化函数。
- “pre-initialization functions”为所有通过 INIT_PREV_EXPORT(fn) 申明的初始化函数。
- “device init functions”为所有通过 INIT_DEVICE_EXPORT(fn) 申明的初始化函数。
- “components init functions”为所有通过 INIT_COMPONENT_EXPORT(fn) 申明的初始化函数。
- “enviroment init functions”为所有通过 INIT_ENV_EXPORT(fn) 申明的初始化函数。
- “application init functions”为所有通过 INIT_APP_EXPORT(fn) 申明的初始化函数。

-
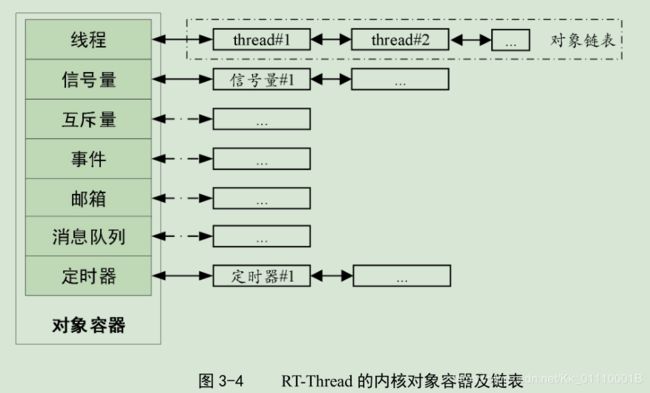
RT-Thread 内核对象模型
RT-Thread 内核对象是为系统对象(线程、信号量、邮箱)维护的一些数据结构,这些数据构
保存了与系统级对象相关的信息。在 RT-Thread 内核对象中分为两类:静态内核对象和动态内核
对象。静态内核对象通常放在 RW 段和 ZI 段中,在系统启动后在程序中初始化;动态内核对象则
是从内存堆中创建的,而后手工做初始化。
静态对象和动态对象示例
/* 线程 1 的对象和运行时用到的栈 */
static struct rt_thread thread1;
static rt_uint8_t thread1_stack[512];
/* 线程 1 入口 */
void thread1_entry(void* parameter)
{
int i;
while (1)
{
for (i = 0; i < 10; i ++)
{
rt_kprintf("%d\n", i);
/* 延时 100 个 OS Tick */
rt_thread_delay(100);
}
}
}
/* 线程 2 入口 */
void thread2_entry(void* parameter)
{
int count = 0;
while (1)
{
rt_kprintf("Thread2 count:%d\n", ++count);
/* 延时 50 个 OS Tick */
rt_thread_delay(50);
}
}
/* 线程例程初始化 */
int thread_sample_init()
{
rt_thread_t thread2_ptr;
rt_err_t result;
/* 初始化线程 1 */
/* 线程的入口是 thread1_entry,参数是 RT_NULL
* 线程栈是 thread1_stack
* 优先级是 200,时间片是 10 个 OS Tick
*/
result = rt_thread_init(&thread1,
"thread1",
thread1_entry, RT_NULL,
&thread1_stack[0], sizeof(thread1_stack),
200, 10);
/* 启动线程 */
if (result == RT_EOK) rt_thread_startup(&thread1);
/* 创建线程 2 */
/* 线程的入口是 thread2_entry, 参数是 RT_NULL
* 栈空间是 512,优先级是 250,时间片是 25 个 OS Tick
*/
thread2_ptr = rt_thread_create("thread2",
thread2_entry, RT_NULL,
512, 250, 25);
/* 启动线程 */
if (thread2_ptr != RT_NULL) rt_thread_startup(thread2_ptr);
return 0;
}在这个例子中,thread1 是一个静态线程对象,而 thread2 是一个动态线程对象。thread1 对象的内存空间,包括线程控制块 thread1 与栈空间 thread1_stack 都是编译时决定的,因为代码中都不
存在初始值,都统一放在未初始化数据段中。thread2 运行中用到的空间都是动态分配的,包括线
程控制块(thread2_ptr 指向的内容)和栈空间。
静态对象会占用 RAM 空间,不依赖于内存堆管理器,内存分配时间确定。动态对象则依赖于
内存堆管理器,运行时申请 RAM 空间,当对象被删除后,占用的 RAM 空间被释放。这两种方式
各有利弊,可以根据实际环境需求选择具体使用方式。
-
内核对象管理架构

在对象管理模块中,定义了通用的数据结构,用来保存各种对象的共同属性,各种具体对象只
需要在此基础上加上自己的某些特别的属性,就可以清楚的表示自己的特征。
这种设计方法的优点有:
(1)提高了系统的可重用性和扩展性,增加新的对象类别很容易,只需要继承通用对象的属
性再加少量扩展即可。
(2)提供统一的对象操作方式,简化了各种具体对象的操作,提高了系统的可靠性。
图中由对象控制块 rt_object 派生出来的有:线程对象、内存池对象、定时器对象、设备对象
和 IPC 对象(IPC:Inter-Process Communication,进程间通信。在 RT-Thread 实时操作系统中,IPC
对象的作用是进行线程间同步与通信);由 IPC 对象派生出信号量、互斥量、事件、邮箱与消息
队列、信号等对象。
-
对象操作块和相关函数
/*内核对象控制块的数据结构:*/
struct rt_object
{
/* 内核对象名称 */
char name[RT_NAME_MAX];
/* 内核对象类型 */
rt_uint8_t type;
/* 内核对象的参数 */
rt_uint8_t flag;
/* 内核对象管理链表 */
rt_list_t list;
};
/*目前内核对象支持的类型*/
enum rt_object_class_type
{
RT_Object_Class_Thread = 0, /* 对象为线程类型 */
#ifdef RT_USING_SEMAPHORE
RT_Object_Class_Semaphore, /* 对象为信号量类型 */
#endif
#ifdef RT_USING_MUTEX
RT_Object_Class_Mutex, /* 对象为互斥量类型 */
#endif
#ifdef RT_USING_EVENT
RT_Object_Class_Event, /* 对象为事件类型 */
#endif
#ifdef RT_USING_MAILBOX
RT_Object_Class_MailBox, /* 对象为邮箱类型 */
#endif
#ifdef RT_USING_MESSAGEQUEUE
RT_Object_Class_MessageQueue, /* 对象为消息队列类型 */
#endif
#ifdef RT_USING_MEMPOOL
RT_Object_Class_MemPool, /* 对象为内存池类型 */
#endif
#ifdef RT_USING_DEVICE
RT_Object_Class_Device, /* 对象为设备类型 */
#endif
RT_Object_Class_Timer, /* 对象为定时器类型 */
#ifdef RT_USING_MODULE
RT_Object_Class_Module, /* 对象为模块 */
#endif
RT_Object_Class_Unknown, /* 对象类型未知 */
RT_Object_Class_Static = 0x80 /* 对象为静态对象 */
};
/*从上面的类型说明,我们可以看出,如果是静态对象,那么对象类型的最高位将是 1(是 RT_
Object_Class_Static 与其他对象类型的与操作),否则就是动态对象,系统最多能够容纳的对象类
别数目是 127 个。*/
/*内核对象容器的数据结构*/
struct rt_object_information
{
/* 对象类型 */
enum rt_object_class_type type;
/* 对象链表 */
rt_list_t object_list;
/* 对象大小 */
rt_size_t object_size;
};
函数
初始化对象(静态)
void rt_object_init(struct rt_object* object ,
enum rt_object_class_type type ,
const char* name)
脱离对象(静态)
void rt_object_detach(rt_object_t object);分配对象(动态)
rt_object_t rt_object_allocate(enum rt_object_class_typetype ,
const char* name)
删除对象(动态)
void rt_object_delete(rt_object_t object)
辨别对象(判断指定对象是否是系统对象(静态内核对象))
rt_err_t rt_object_is_systemobject(rt_object_t object);
-
RT-Thread 内核配置示例
配置宏定义主要在 rtconfig.h中
-
RT-Thread小结
- RT-Thread 内核部分的实现包括:线程管理及调度器、定时器管理、线程间通信管理及内存管理等等,是操作系统的核心。
- 系统配置文件 rtconfig.h 是由配置工具自动生成的,一般情况下无需手动更改。
- 使用自动初始化时,需要根据实际需求,安排好各个函数的先后执行顺序。
注:文章参考培训教程