强化学习介绍,Policy-Gradient(包含PPO中的部分),李宏毅课程笔记(整合了Lec4的Q-Learning及Imitation Learning)
老师的PPT下载。
RL 与一般机器学习不同的地方:当前的动作会影响到未来。影响环境、影响接下来看到的东西。

observation与State:observation是更raw的场景或图像,更原始。State是经过处理、去掉冗余后的observation。当模型能力很强的时候,例如一些游戏直接输入画面,那么observation与State就一样了。
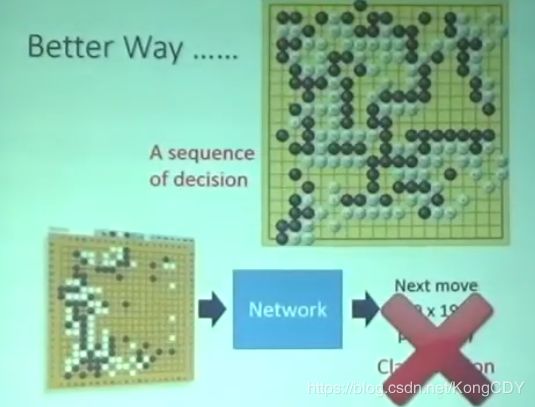
仅仅只将与环境的互动问题当做一种supervised问题是学不好的,因为机器不考虑后面的影响,只通过当前的输入做一个决定,无法知道学习到的东西哪些是好的哪些是坏的。
目标:最大化总的reward。难点就是reward跟Env并不是某个网络或某种可导的函数,没法反向求导顺回去调整actor。Env跟Reward往往比较复杂或是个黑盒子,遇到这种情况,就是用policy gradient。

强化学习的难点:
- Reward可能很稀疏,很少能得到正的reward。如何去挖掘正确的action。
- reward delay,往往出现比较晚。然而其他没有得到reward的action也是有用的,可以规划未来,影响未来。
- 探索更多可能,没有做过的行为。
Policy-based
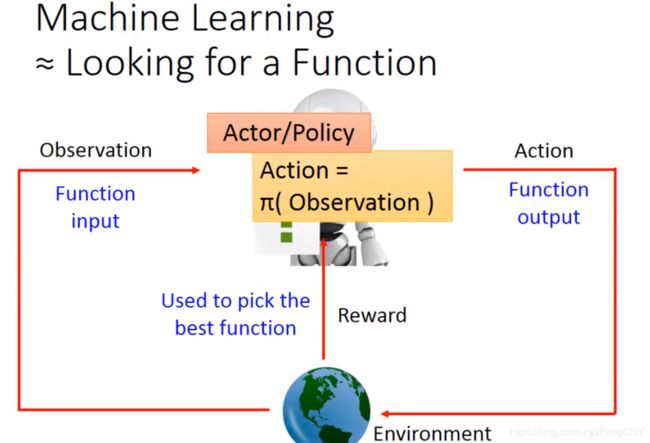
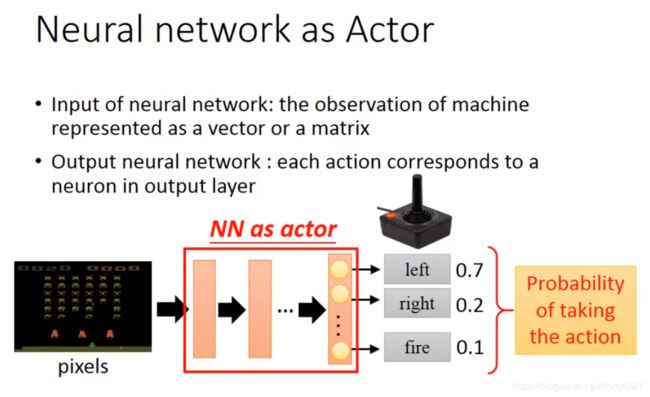
actor是function π,输入observation,输出action。policy即action。
最大化整个episode的reward和。最大化R的期望![]() 。
。


![]() 相当于是用参数为
相当于是用参数为![]() 的actor以概率
的actor以概率![]() 采样。玩N次就是以
采样。玩N次就是以![]() 采样N次得到N个
采样N次得到N个![]() 。所以上面的红框是可以近似的。目标是:
。所以上面的红框是可以近似的。目标是:

需要对![]() 求导。
求导。

![]() 跟
跟![]() 没关系,不需要对他求导。此为环境给的反馈,不需要知道是什么样。上面等式右边为了让
没关系,不需要对他求导。此为环境给的反馈,不需要知道是什么样。上面等式右边为了让![]() 出现,然后:
出现,然后:

按log的微分把上面等式变换成对![]() 的微分,上面的红色框框可以换成采样多个
的微分,上面的红色框框可以换成采样多个![]() ,按上面的近似相加取平均:
,按上面的近似相加取平均:

之后要计算![]() :
:
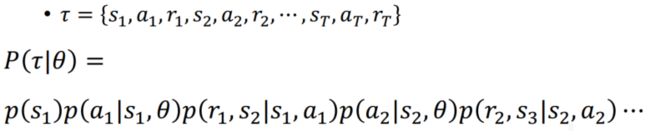
前面第一项![]() 是
是![]() 也就是第一个画面出现的几率。第二项
也就是第一个画面出现的几率。第二项![]() 是在
是在![]() 状态下采取
状态下采取![]() 的几率,这个与actor有关。第三项
的几率,这个与actor有关。第三项![]() 是在
是在![]() 状态下采取
状态下采取![]() ,跳到
,跳到![]() 得到
得到![]() 的几率,这个与环境有关。后面以此类推,可以写成:
的几率,这个与环境有关。后面以此类推,可以写成:
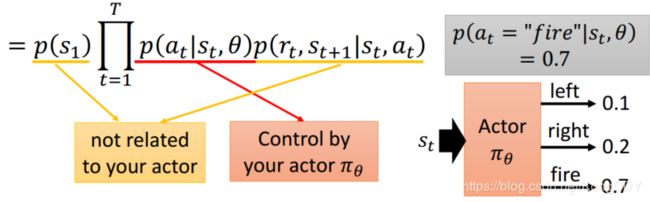
其中黄色底线部分与actor是无关的,只有红色部分有关。然后取log,将相乘变成相加,并去掉与![]() 无关的项:
无关的项:
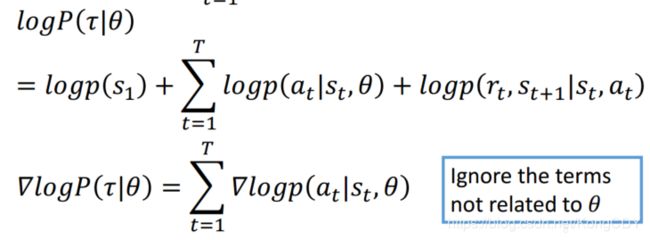
因此![]() 就可以写成,下面一行是把
就可以写成,下面一行是把![]() 乘到里面:
乘到里面:
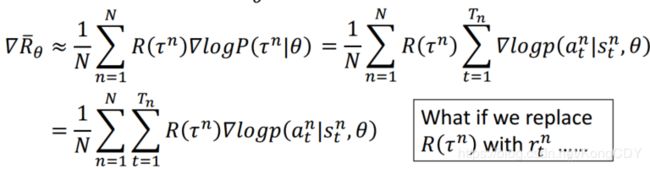
这个式子理解成,在![]() 状态下采取
状态下采取![]() 的概率的梯度,并乘以整个这次游戏所得到的reward值。在
的概率的梯度,并乘以整个这次游戏所得到的reward值。在![]() 这次游戏中,在状态
这次游戏中,在状态![]() 下采取
下采取![]() ,如果整个游戏得到了正的reward,那就应该调整
,如果整个游戏得到了正的reward,那就应该调整![]() ,使得出现这个动作的概率提高。反之亦然。需要注意的是,这里的
,使得出现这个动作的概率提高。反之亦然。需要注意的是,这里的![]() 是某时刻
是某时刻![]() 所采取的动作的概率,但是要乘以整个游戏的reward
所采取的动作的概率,但是要乘以整个游戏的reward ![]() 。假设将
。假设将![]() 换成
换成![]() 的话,那么可能只有fire动作有reward(小蜜蜂游戏),其他动作没有reward,导致模型不会提高其他动作的概率,只提高fire的概率。那么最后actor就只会开火,不会别的了。
的话,那么可能只有fire动作有reward(小蜜蜂游戏),其他动作没有reward,导致模型不会提高其他动作的概率,只提高fire的概率。那么最后actor就只会开火,不会别的了。

为什么要取log?

取log等于右边梯度除以概率。假设不除以概率,因为![]() 是所有情况梯度的均值,假设某次游戏
是所有情况梯度的均值,假设某次游戏![]() 的R很高,但是出现的几率很罕见,对总的R影响很小。其他R=1的情况出现的很多,那么均值会前向R=1时的情况,提高R=1时的动作概率亦然可以提高总的R,就使得很罕见的R=2情况下的a动作概率无法提高。那么除以
的R很高,但是出现的几率很罕见,对总的R影响很小。其他R=1的情况出现的很多,那么均值会前向R=1时的情况,提高R=1时的动作概率亦然可以提高总的R,就使得很罕见的R=2情况下的a动作概率无法提高。那么除以![]() 相当于做了一个normalize,将概率比较高的动作b除以一个大值,进行一个平滑。使得优化时不会偏好出现几率高的action。
相当于做了一个normalize,将概率比较高的动作b除以一个大值,进行一个平滑。使得优化时不会偏好出现几率高的action。

这里还有个问题就是,假设R都是正的,那么被采样到的action会增加,R大的增加的多,R少的增加的小,也可能会降低,因为最后softmax要将所有动作概率相加为1。那么假设有些action没有被采样到,那么这个action的动作就会被降低。

其解决方案就是在R上减一个bias,这个bias是要自己设定的。相当于有一个baseline,只有R超过了baseline才会提高此R的action,小于baseline的就会减少,这样就不会降低没有被采样到的action的概率了。baseline可以等于reward的均值。


这个公式仍然存在一个问题就是,每对(![]() ,
,![]() )前面乘的是整个episode的权重,换句话说就是整个episode里的(
)前面乘的是整个episode的权重,换句话说就是整个episode里的(![]() ,
,![]() )都是一个权重,这显然是不公平的。因为整个episode里有些动作是好的有正的reward,有的是不好的reward,但却给他们乘了相同的权重。例如下面的例子,左边episode的reward是+3,但主要来源于第一个action,后面的
)都是一个权重,这显然是不公平的。因为整个episode里有些动作是好的有正的reward,有的是不好的reward,但却给他们乘了相同的权重。例如下面的例子,左边episode的reward是+3,但主要来源于第一个action,后面的![]() 、
、![]() 反而会导致扣分。理想情况下,假设sample够多,这个问题可以被解决。但一般是不够多的,所以需要把这个action的贡献反应出来。其方法就是将此action时刻的reward到最后的reward加起来,作为此数据的权重。因为action之前的reward与这个action无关。此action的行为影响之后的reward。
反而会导致扣分。理想情况下,假设sample够多,这个问题可以被解决。但一般是不够多的,所以需要把这个action的贡献反应出来。其方法就是将此action时刻的reward到最后的reward加起来,作为此数据的权重。因为action之前的reward与这个action无关。此action的行为影响之后的reward。

更进一步,对未来的reward做一个discont,衰减。因为当前的动作对更久之后的reward的影响会变小。另外,b可以是与具体state相关的,通常是一个网络输出的。
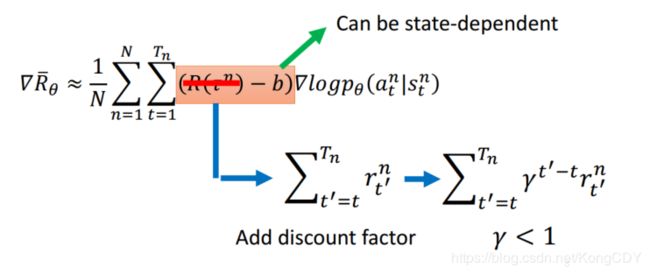
上面的新的R的计算,可以改成下面的advantage function。其衡量在某个state下,采取这个at相对于其他action有多好,是个相对,不是绝对的。这个A通常也可以是一个网络,以后老师讲actor-critic时会讲。万物皆可network……
Policy Gradient
算法步骤:
- 首先随机初始化模型参数θ,准备好测试环境。
- 使用此
 模型在环境中玩N次,得到N个
模型在环境中玩N次,得到N个 ,把数据收集起来。
,把数据收集起来。 - 使用右边公式对R求导,更新。然后返回第一步,如此循环。

前面的公式已经推过了,问题是最后一项![]() 的求导。看下图回想下在分类任务中,优化的是一个cross entroy loss,下图minimize的目标函数。因为一般分类任务的标签是one-hot的,所以就是最大化
的求导。看下图回想下在分类任务中,优化的是一个cross entroy loss,下图minimize的目标函数。因为一般分类任务的标签是one-hot的,所以就是最大化![]() ,
,![]() 对应标签所在的类别
对应标签所在的类别![]() 。那么相当于最大化 logP("left" | s),目标的梯度更新即为最底下那行。所以对比上面我们要求
。那么相当于最大化 logP("left" | s),目标的梯度更新即为最底下那行。所以对比上面我们要求![]() 的导数,相当于就是优化一个标签为a那个动作类别的cross entroy loss,权重为R。
的导数,相当于就是优化一个标签为a那个动作类别的cross entroy loss,权重为R。

下图即类比于分类任务,先部分R那部分,被遮住了。因此,相当于输入是s,target是a的分类问题。但是a本身就是输入s所得到的类别,那么网络不是跟没学习一样吗?所以前面要乘以![]() ,赋予每个data的一个权重。
,赋予每个data的一个权重。

Critic
critic是衡量某个actor ![]() 在某个action时,最终得到的Reward的期望值大小。其结果会随着actor的不同而不同。
在某个action时,最终得到的Reward的期望值大小。其结果会随着actor的不同而不同。
例如:以前的光在这里下大马步飞,那critic衡量出bad。后来光变强了,在此时下大马步飞,critic就会比较好。这里光是actor,大马步飞是action,佐为是Critic。

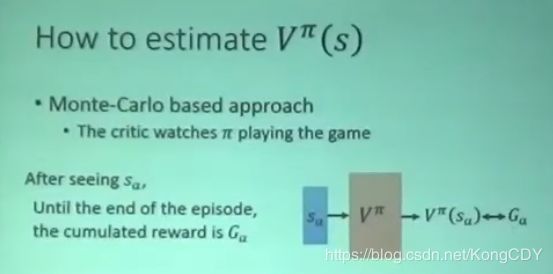
如何估计Critic:
- 基于蒙特卡洛方法,用一个critic去监视actor
 玩游戏,当看到
玩游戏,当看到 出现时,直到游戏结束所得到的累计Reward
出现时,直到游戏结束所得到的累计Reward  。critic就要拟合输入输出,是个回归问题。
。critic就要拟合输入输出,是个回归问题。

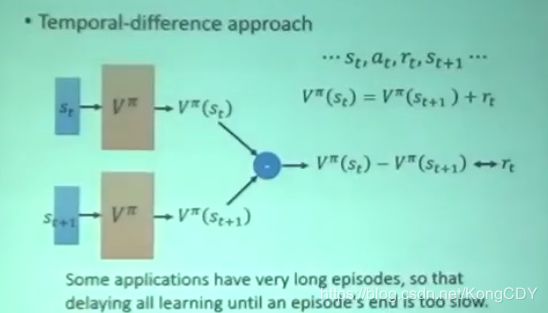
- TD方法,
 求的是
求的是 时刻的到最后的累计reward,
时刻的到最后的累计reward, 求得是t+1时刻到最后的reward,他们之间差值即为
求得是t+1时刻到最后的reward,他们之间差值即为 。网络学习的就是这个差值。此方法的好处是不需要等整个episode完事就可以让网络学习。
。网络学习的就是这个差值。此方法的好处是不需要等整个episode完事就可以让网络学习。
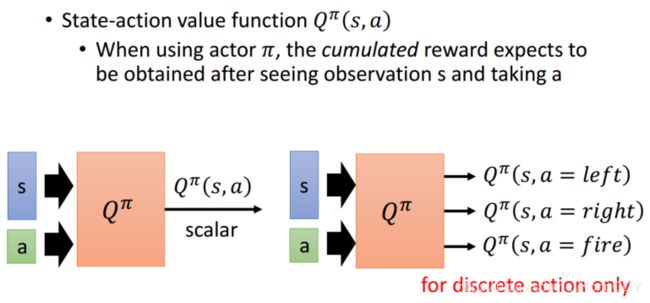
另一种Critic,Q-learning
输入有action,但一般将不同action的累计reward作为输出。
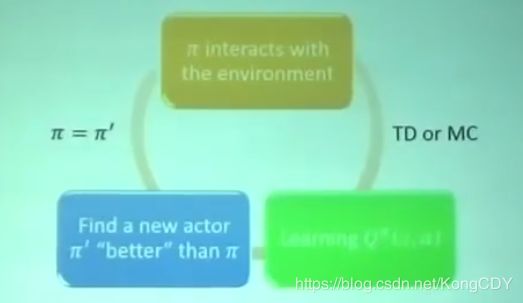
可以用Qfunction找出一个比较好的actor,即Q-learning。初始化一个actor ![]() ,通过它与环境互动获得反馈,然后利用TD或MC去学习Q function,利用Q找到一个更好的actor
,通过它与环境互动获得反馈,然后利用TD或MC去学习Q function,利用Q找到一个更好的actor ![]() ,用
,用![]() 替换
替换![]() 。
。
对于所有的s,![]() ,即
,即![]() 比
比![]() 好。如何找到更好的
好。如何找到更好的![]() ,当某个状态s下,取的
,当某个状态s下,取的![]() 所有动作对应的最大Q值,作为
所有动作对应的最大Q值,作为![]() 的输出,让
的输出,让![]() 等于这个更好的值。
等于这个更好的值。


DQN的各种trick:Rainbow,整合了6种DQN的改进。
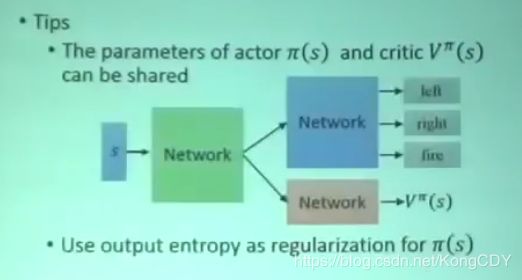
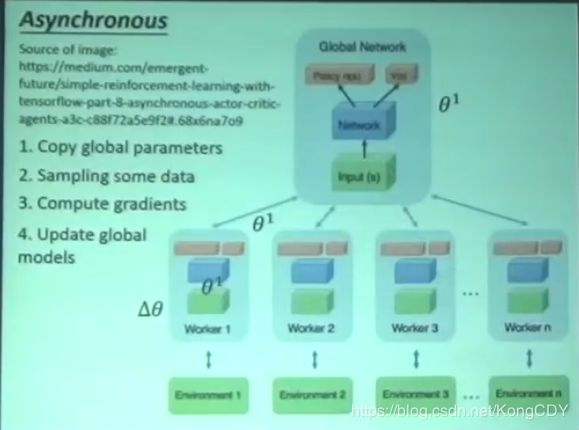
Actor+Critic, A3C
之前是根据reward function的输出来让actor学习如何采取action,得到更好的reward,但是actor与环境的互动会有很多随机性,直接根据随机性的互动可能没法学得很好。A3C的精神是,actor不要跟环境学,不看环境的reward,因为环境的reward随机性大,跟critic学。前两个A,A2C:

A3C的最后一个A:Asynchronous。有一个全局的actor-critic,将其参数复制N份,其N个分身与环境互动,用上面A2C去学习,然后将所有参数传回去更新全局actor-critic。
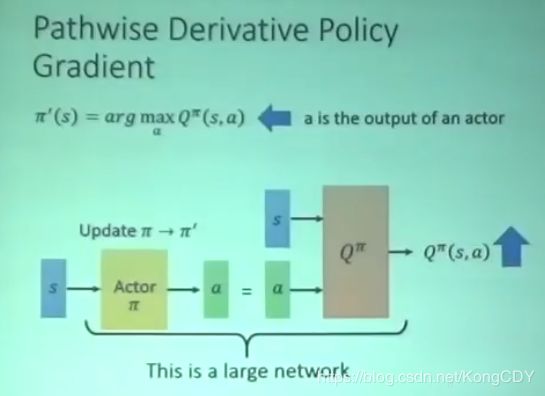
下面这个方法是针对连续a的情况,再使用一个actor去输出a,这个a可以使得Q最大。有点类似GAN,Q是D。
Inverse Reinforcement Learning,Imitation Learning
模仿学习里只有Env跟Actor,没有reward。但是有专家级别的trajectory。
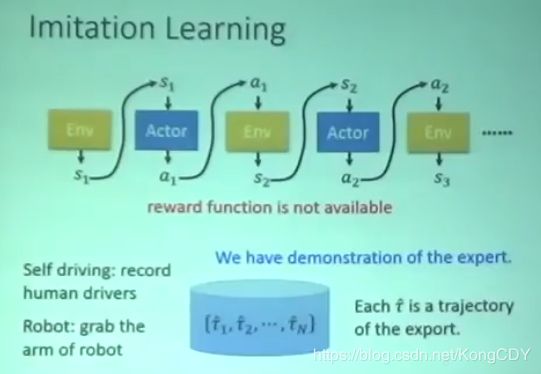
为什么会有模仿学习,因为在现实生活中,reward可能很难定义,不同于游戏。例如自动驾驶、对话机器人。人工设计的reward可能引起actor不确定的行为。
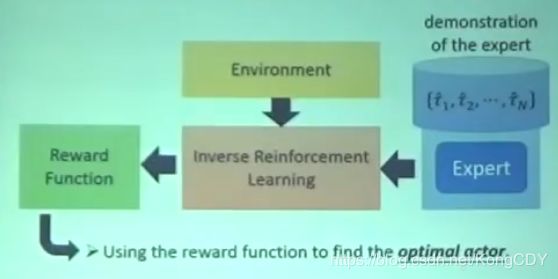
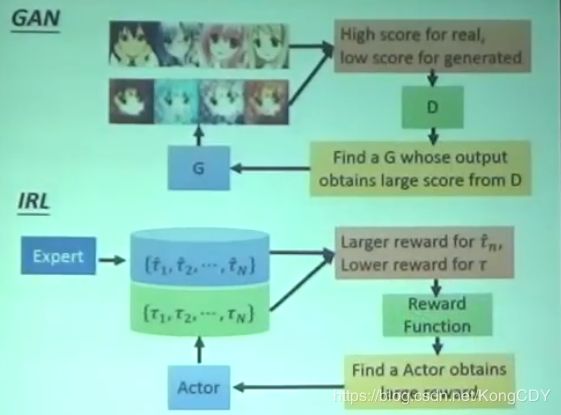
大体流程是:先初始化一个actor。然后让actor与环境互动,得到很多trajectories。然后定义一个reward函数,使其专家得到的trajectories一定比actor得到的好。然后利用新的reward函数去更新actor。如此反复,最后得到reward函数跟actor。整个流程跟GAN很像。
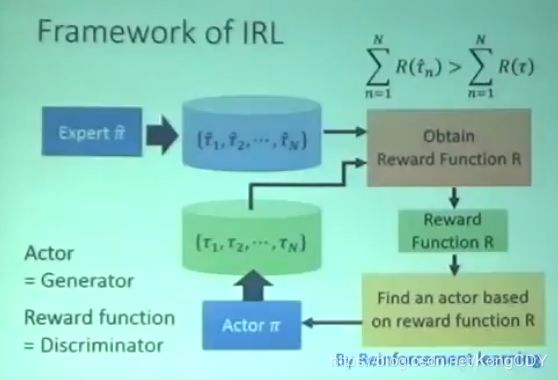
与GAN的比较