CS231n课程作业(二) CNN
前言:
之前介绍了全连接网络(FC Net),也就是常规的神经网络。
常规的神经网络是对input进行仿射变换、非线性变换等处理,最终计算出score。其目的是为了让input data所属类的score最高。为了达到这个目的,需要通过迭代不断地调整仿射变换时的参数W。(因此主要涉及的参数量也与W有关)
常规的神经网络表现还不错,但如果图像尺寸较大,则会出现问题:
我们之前数据集中图片尺寸为32x32x3,这样,在input layer 与第一个hidden layer之间,hidden layer中每一个神经元将会有3072个weights,W(3072, hidden_dim)。因此,如果图片尺寸较大,weight的数量也会剧增,处理起来将会很复杂。而且参数量过多会导致过拟合。So,为了解决这个问题,CNN牛逼起来了。因为CNN:局部连接、权值共享 。
一、CNN
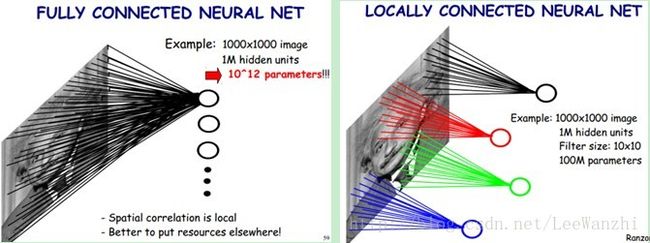
通过上图,可以发现全连接层每个神经元都与图片上所有像素相连接,而CNN则是局部连接。
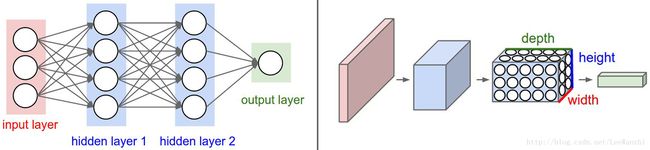
注:由于FC网络输入的是向量,而CNN输入的是图像,因此图2 在表示上有很大的不同。但CNN进入FC layer时,仍然会将input data reshape为(N,D)
局部连接: 每个神经元只与上一层中的局部区域相连接,局部连接的空间大小称为局部感受野。
假设,每个神经元连接F x F个像素区域,则W参数个数为hidden_dim * F * F。这意味着,局部连接可以使参数数目锐减。
关于局部连接,其实人分辨事物也是这样,不是直接看到一个东西就知道它是什么,而是先感知局部信息,然后将局部信息综合起来得到全局信息。
权值共享: 当前层每个神经元都使用相同的W和bias。
这个需要继续上面的局部连接,在局部连接中,每个神经元只是连接的像素数锐减了,但没有说因此关联的W相同。在权值共享中,则进一步显示CNN的优点,那就是所有神经元使用的W都相同,参数个数不再与神经元个数有关。这样参数量为F * F (注:这里暂时忽略3 channels以及bias)。参数真的是锐减啊!
CNN的框架:
和FC神经网络一样,CNN没有固定的框架。但一般都会有Conv Layer、ReLU Layer、Pooling layer、FC layer这些结构。下面详细阐述。
二、Conv Layer (卷积层)
1. 卷积层的相关计算
卷积层的工作:利用卷积核或者称为滤波器对input图像做卷积运算。
将卷积核与对应区域相乘,再全部相加(包括所有通道)。
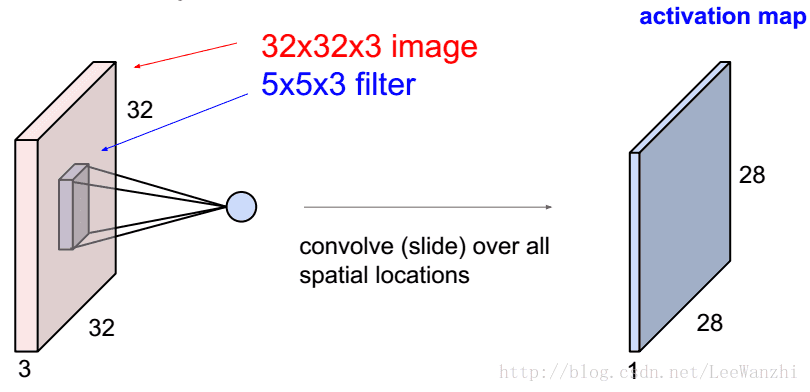
图中为1个filter,如果我们有6个,则可以得到28 x 28 x 6 的feature map。
参数量为: (5 * 5 * 3 + 1)*6
具体为什么feature map是这样的size,其实自己移一移filter就知道了,下面给出计算公式。
注:卷积核的深度总是和输入图像的深度相等。
假设input size:W1 x H1 x D1
此时,需要4个hyperparameters:
number of filters K ; filter spatial extent F ; stride S ; the amount of zero-padding: P
then the output size: W2 x H2 x D2, where:
W2 = (W1 - F + 2P)/S + 1
H2 = (H1 - F + 2P)/S + 1
D2 = K
由于权值共享,因此每个filter产生F * F * D1个weights,一共产生(F * F * D1)*K个weights和K个bias。(K通常为2的指数,据说会让PC进入高效率运算)
注:In practice, common to zero-pad the border: (F-1)/2。
这样尺寸就不会改变,毕竟不能抢了池化层的饭碗。
2. 如何理解卷积层
卷积层的训练实际是训练不同的filters,每个filter都可以对特定的模式进行激活,即对于特定的模式输出值很高,对于其他模式输出值很低。
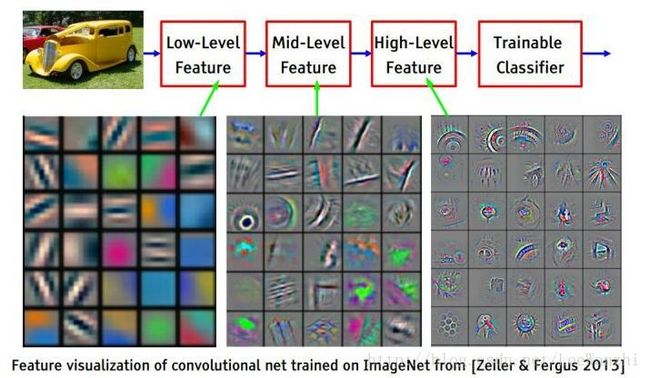
如图,展示的是不同模式的filter,它们只激活特定的模式。(这篇paper可以看一看)
CNN的第一个卷积层用来检测low level feature,比如边、角、曲线等,然后将输出的feature map(activation map)传递至第二层。随着卷积层的增加,filter检测的feature就越来越复杂。如第二层filter用于检测low level feature的组合,如半圆、四边形等。
在初始化时,filter的权值都是random的,它们无法检测任何feature。此时,它们需要被告知what the object is,然后学习这些特征,使损失函数最小。这个过程就叫做训练。
关于卷积层的工作,可以结合下图感受一下:

其中,亮色的value很高,黑色的value很低且为负值,背景色的value在0左右。可以看出卷积层先是对low level feature有较高的输出,逐渐地对low level feature的组合,即high level feature有很高的输出(即该类别最独特的特征),最终进入FC层进行分类。
交互式界面链接在此:卷积神经网络交互式界面
三、Pooling layer(池化层)
卷积运算时通常不改变图片的空间尺寸,空间尺寸的减小通常在池化层中进行。在实际应用中,一般都将图像尺寸减半。
因此,常用设置 [filter: 2x2 ; stride :2]
分类:
max pooling:最大池化,依次将filter在input image上滑动,取区域中的最大值
average pooling:平均池化,依次将filter在input image上滑动,取区域中的平均值
计算输出尺寸:
假设输入尺寸: W1 x H1 x D1
需要两个hyperparameters:
filter的尺寸 F, 步长 S
输出尺寸为: W2 x H2 x D2, where:
W2 = (W1 - F)/S + 1
H2 = (H1 - F)/S + 1
D2 = D1
注意:池化层中不使用zero-padding
Attention:池化层中没有参数,因为要么是最大池化,要么是平均池化,不需要参数。卷积层中有。
四、本次作业中的CNN
本次作业是一个3-layer CNN,结构可以表示为:
input - [Conv - ReLU - max pool] - [FC - ReLU] - [FC - Softmax]
首先是构建好这个框架model,然后定义一个solver对model进行训练,得到best model。即可进行predict。
model = ThreeLayerConvNet(weight_scale=0.001, hidden_dim=500, reg=0.001)
solver = Solver(model, data,
num_epochs=1, batch_size=50,
update_rule='adam',
optim_config={
'learning_rate': 1e-3,
},
verbose=True, print_every=20)
solver.train()五、spatial batch normalization(空间批量归一化)
在FC网络中,BN对结果有很大的改善。但在CNN中,实际上经过多次实验表明,有BN和没有BN其实没有什么区别,所以CNN现在一般不用BN了。但为了知识的全面性,还是要提一下。
在FC网络中,input是(N,D),我们是在D方向上求均值和方差,即对矩阵每一列分别求均值和方差。
在CNN中,由于input(N,C,H,W),我们reshape input为(N*H*W, C),在深度方向上对每个通道进行均值和方差的计算,然后再进行归一化、缩放平移。最后再将input数据 reshape回来。
其余操作和FC网络一样。
六、python知识补充
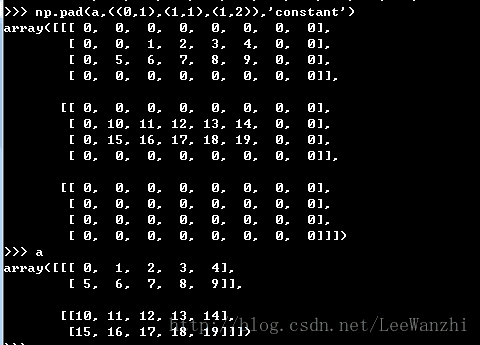
1. np.pad(array,tuple,’constant’, [constant_value = 0])
function: zero-padding
tuple内有几个元组即对几个维度操作,(0,0)表示不填充,(1,1)表示填充上下或左右各一个元素
eg: