PRML读书笔记(一)
Machine Learning 基础
Machine Learning 步骤
整个机器学习大致可以分为4个步骤:数据分析,数据预处理,模型选择以及训练和优化。比较宏观的流程如下图所示。

栗子:Polynomial Curve Fitting
假设我们现在有一组从 f(x)=sin(2πx)+ϵ(x) 生成的数据,其中 ϵ(x)=N(x|0,β) 表示噪声。那么我们就得到原始数据为
x=(x1,x2,…,xN)T,xi∈(0,1) ,相对应的函数值 t=(t1,t2,…,tN)T 。我们要预测,一个新的数据 x~ 相对应的函数值。
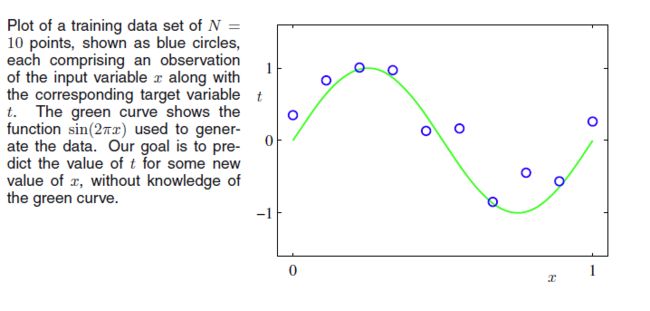
我们得到的只有 x,t ,并不知道 f(x) 的形式。
数据分析(Data Analysis)
由于训练数据由输入向量与其对应的输出向量组成,因此这是一个监督学习(supervised learning)的问题,并且由于输出向量是一组连续的变量,故又可以细分成回归问题(regression)。那么我们可以用以下函数取逼近
y(x,w)=w0+w1x+w2x2+⋯+wMxM=∑Mj=0wjxj(1)
理论
数据预处理(Preprocess)
数据预处理具有以后优点:
1. 减小输入的多变性,比如输入数据是一系列图片时,我们可能需要将这些图片转换成固定尺寸的图片
2. 加速计算,例如归一化处理,能够输入向量转换到均值为0的特征空间,从而减小划分曲面的偏置搜索
3. 其他
在curve fitting中,我们需要将输入向量转换成 X=⎡⎣⎢⎢⎢⎢⎢11⋮1x10x11⋮x1N……⋱…xM0xM1⋮xMN⎤⎦⎥⎥⎥⎥⎥
如果是在训练的时候计算 xji 的话,会消耗大量的计算资源。
模型选择
损失函数
由数据分析步骤,我们已经得到了基础的模型,我们希望我们的预测值 y(x,w) 与 t 尽量相近,那么我们可以用以下度量来表示

那么对于整体训练数据的度量就可以由(2)得到,
上式(3)在本例中可以等价于
需要注意的是公式(3)与公式(4)表达的意思并不是一样的,式(3)是期望风险(模型关于联合分布的期望损失),式(4)是经验风险(模型关于训练样本的平均损失),当 P(x,t)=1N 或者样本容量N趋向于无穷时,经验风险趋向于期望风险。
超参数
式(1)里的参数M是不能在训练中直接学到的,需要在训练之前设置,因此称为超参数(hyperparameter),一个方法是令 M=1,2,3,… ,但是在经验风险下 E(w)=12∑Nn=1L(y(x,w),t) ,M的不同会使模型的较大的性能差;另一个方法是采用正则化方法
之后会详细介绍这两种损失函数的概率意义。
训练与优化
在本例中可以用最小二乘法,直接求解。
实验结果
E(W)下的结果
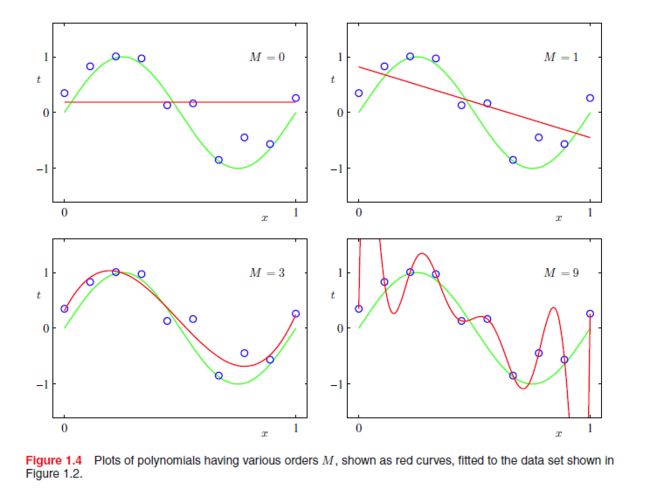
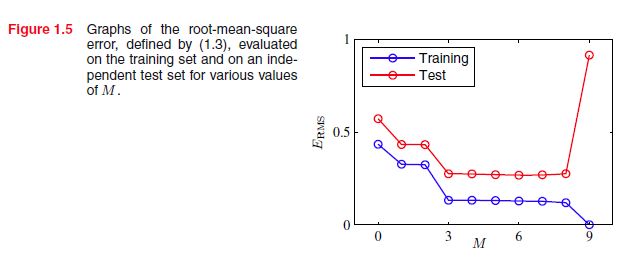
我们可以从上图看到,当 M=0,1,3,9 的时候,随着M的增加,曲线能很好更好的拟合训练数据,在 M=9 的时候 E(W)=0 ,但是很明显如果来了一个新的测试数据, M=3 的效果是最好的,这是因为 M=0,1 时,曲线处于欠拟合(underfitting)的状态,而 M=9 时则过拟合(overfitting)。
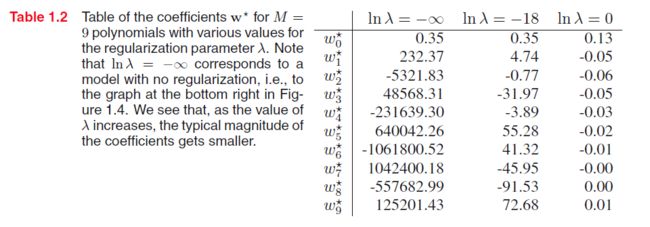
直觉上,我们认为 M=9 的模型会比 M<9 的模型要好,至少 M=9 的模型的性能不会低于 M<9 的模型,因为 M=9 的模型可以产生 M<9 的特殊子集(如 M=3 时 令 wi=0,i=4,…,9 )。下表是相应的权值 w∗ 。*
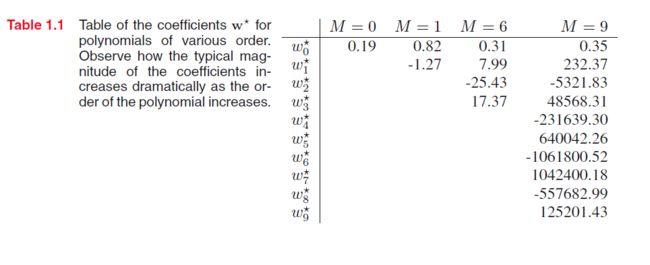
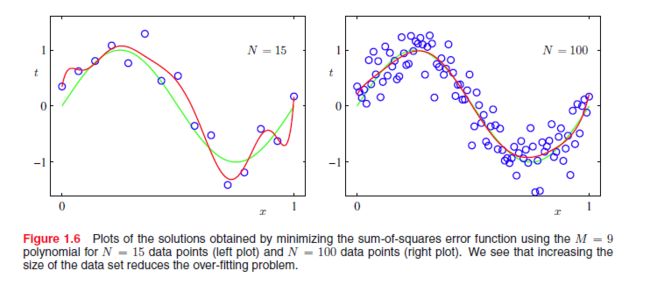
我们可以看到,随着M的增加,其相应的权值也会变得非常大。但是由于训练数据存在噪声,从而使整个曲线的震荡幅度变大。数据量越大,噪声的影响就越小。
E~(W) 下的结果
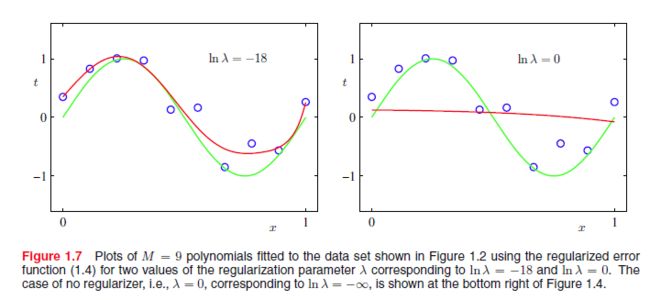
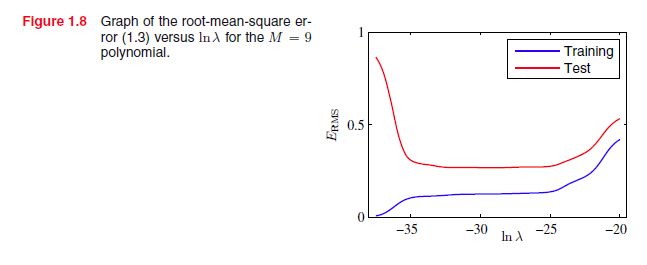
由上述三图可以知道,在 E~(W) 的情况下,模型能够达到相当好的效果,这是因为正则项能够使权值收缩。从而能够降低噪声造成的震荡幅度。
损失函数
损失函数的概率意义

最大似然
对于训练样本 (x,t) ,我们希望 p(t|x,w)=∏Ni=1N(ti|y(xi,w),β) 达到最大,那么等价于
即最小化 E(W) 等价于最大化 lnp(t|x,w) ,即 E(W) 具有最大似然的性质。
最大后验
前面的假设是对于任意的 w 具有相同的选择概率,但是如果我们引入先验知识,即
那么 p(t,w|x) 最大,由于 p(t) 可以看作一个常数,那么 p(t,w|x) 就等价于
即等价于最小化 β2∑Nn=1{y(xn,w)−tn}2+α2||w||2 ,也就是最小化 E~(W) 等价于最大化后验概率。
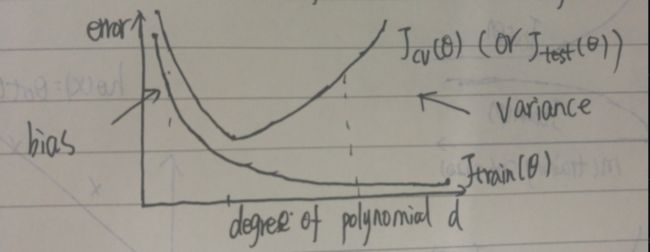
bias和variance
求极值
那么得到
令
将式(12)代入到式(10),可得到
式(13)中的第一项可以表示为bias,第二项可以表示为variance, E(L)=bias+variance ,在polynomial curve fitting中,损失函数只优化了bias项,而variance项则相当于固定误差(对于特定的M)。在其他例子中,我们可以看到,函数的优化相当于trade-off between bias and variance。
第二项与 y(x) 无关,是数据的噪声的固定误差,即不管怎么优化, E(L)≥∫{t−E[t|x]}2p(x,t)dxdt 。第三章会详细介绍第一项的意义。