PRML读书笔记(四)
分类的线性模型
分类的目标是在给定输入,预测具有离散性质的目标值。输入空间被多个决策平面划分成多个决策区域,每个区域代表一个类别。决策平面是输入特征的线性函数(待会会详细介绍),因此在D维空间上的决策平面是(D-1)维的超平面,如果数据能够被这些决策平面准确划分成n个类别区域,那么数据集线性可分(linearly separable)。
当有K(>2)类时,我们采用 1-of-K 编码格式也叫one-hot encoding。 t={0,…,1,…,0}T,∑ktk=1 。
生成模型与判别模型
这章的模型可以一般表示为
其中 f(⋅) 是激活函数。如果令 f 为一个恒等函数(identity function),即 f(⋅)=⋅ ,那么这个模型就变成了第三章的线性回归模型;而如果 f 是非线性函数,那么这个模型就为分类模型,是一个广义线性模型(Generalized Linear Model,GLM),这是因为决策平面为 y(x)=constant⇒wTϕ(x)+w0=constant ,可以看到决策平面是输入特征的线性函数。
4.1 判别函数(Discriminant Functions)
在给定输入特征时,判别函数输出一个类别 Ck
4.1.1 二分类问题
最简单的判别函数为如下的线性判别函数
当 y(x)≥0 时,我们将 x 分到类别 C1 ,否则分到 C2 。因此bias项 w0 的负值有时候也被称为阈值。
因此决策平面 S 就并定义成了 y(x)=0 ,从几何上看,我们可以知道 wT 是 S 的法线,那么 w0 就可就决定了决策平面与原点的距离 −w0∥w∥ 。

上图中 x 是空间上任意一点, x⊥ 是 x 正交投影到平面 S 上的点, r 是 x 到 S 的距离,那么
如果令 x0=1,w~={w0,w},x~={x0,x} ,那么 y(x)=w~Tx~
4.1.2 多类别
对于多类别,可以训练K-1个分类器,每个分类器可以看做是一个二分类问题,即类别 Ck 与 非 Ck ,由于约束,我们训练K-1个分类器即可;训练 K(K−1)/2 个分类器,类别为 Ck 和 Cj 。这两种方法都会导致模糊区域的问题
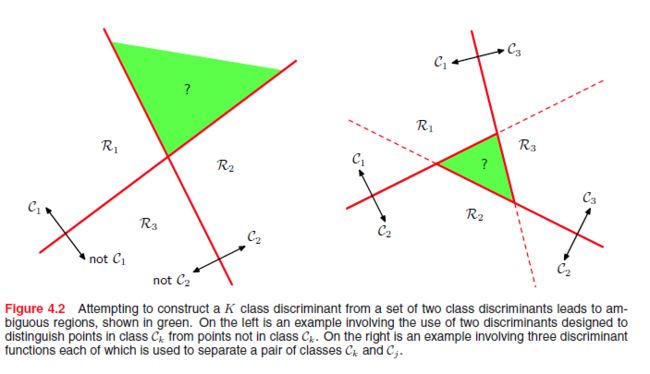
为了解决模糊区域问题,可以考虑 K 类别判别(K-class discriminant),
虽然形式上有点类似前两种方法,但是只有当所有 j≠k,yk(x)>yj(x) 时,才分类到 Ck ,那么 Ck 与 Cj 的决策边界(平面) 就变成了 yk(x)=yj(x)⇒(wk−wj)Tx+(wk0−wj0)=0 ,这与二分类的决策平面一致。

由上图知道 xa,xb 是决策区域 Rk 的任意两个点,那么在直线 xaxb 上的任一点 x^ ,我们可以表示为
明显对于任意 j≠k ,我们有 yk(x^)≥yj(x^) ,即对于线性可分的数据, Rk 是单连通凸区域(singly connected and convex)。
4.1.3 分类的最小二乘法
采用最小二乘法能够使预测值逼近 E[t|x] ,详细参考第三章中的最小二乘法的解释。 对于K类别,我们有
最小二乘法对离群点不鲁棒,如下图
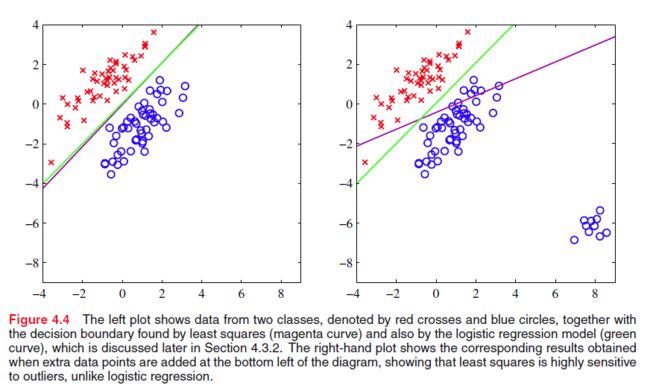
左图的决策边界已经能够很好地划分两个区域了,但是来了一些新的数据的时候,如右图,尽管原先的决策边界也能够很好地划分数据,但是由于采用了最小二乘法,为了使损失达到最小,即划分边界距离两个类的条件期望 E[t|x] 最近,从而驱使原先的决策边界偏离,即右图紫色边界线。
(书上原话: The sum-of-squares error functin penalizes predictions that are ‘too correct’ in that they lie a long way on the correct side of descision boundary.)
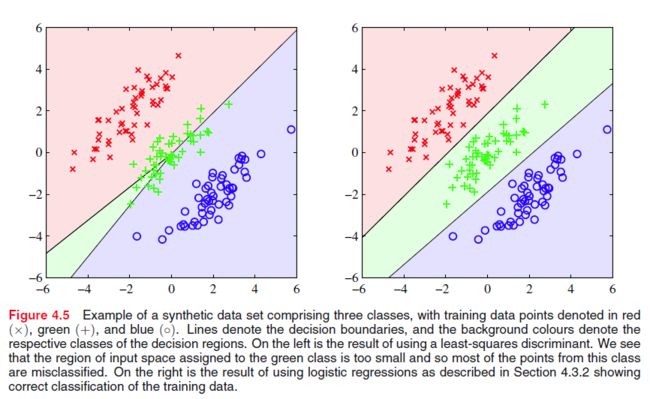
我认为导致左图的原因除了二乘法原因外,还有 K-class discriminant方法中,所有的决策区域必定相交于一个平面,所以左图的数据对于 K-class discriminant是不可分的(?)
导致上述问题的一个根本原因是,最小二乘法是高斯分布假设下的最大似然估计解决方案,而对于分类问题的目标值是离散的,而不是连续的,从而与高斯分布假设不相符。
4.1.4 Fisher线性判别(Fisher’s linear discriminant)
线性判别函数一般表示为 y=wTx , 从几何上看,我们将 D 为输入 x 经过一个变换之后,输出了一个一维的空间 y ,并且在这个一维空间上不同类的数据是可分的。考虑2分类问题,只有推广。如果将每个类看成一个簇,那么它中点看做
为了使不同类的数据分开,我们使 m1,m2 投影到一维空间上的距离最远,即
假设 xa∈C1 ,当 xa 在 m1 附近或者 m1xa−→−− 的方向与 m1m2−→−−− 背离(夹角大于90度),那么 xa 能够与 C2 中的点很好地分离,同理 C2 。
但是对于 xa 不在 m1 附近并且 m1xa−→−− 的方向与 m1m2−→−−− 同向(不是夹角等于0,而是夹角小于90度) ,那么这些点就有可能不能很好地分离开,如下图左图所示
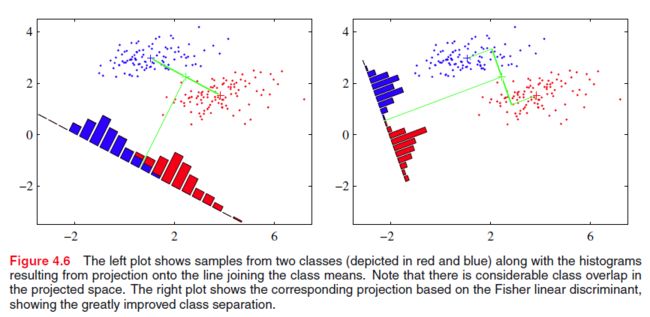
Fisher linear discriminant wiki。Fisher线性判别对这个问题进行了研究,他的思想要使类内(within-class)数据的方差最小,并且使类间(between-class)数据的方差最大,从而得出了Fisher criterion
经过调整后,我们就得到了上图右图,可以看出此时不同类的数据已经能够很好地划分开来。
求解 w
需要注意的是此时求解的 w 是决策超平面的法向量,还需要选取一个阈值 y0 。
4.1.5 Fisher判别与最小二乘法的关系
最小二乘法:驱使模型的预测值与目标值尽可能相近
Fisher判别:最大化输出空间的类别差别
在二分类问题中,Fisher判别可以当做最小二乘法的一个特殊情况。在最小二乘法中,当我们用 {N/N1,−N/N2} 代替 {1,0} 时,即可得到Fisher判别。
4.1.6 多类别的Fisher判别
采用K-class discriminant模型,我们有
类比二分类的Fisher判别,我们有
4.1.7 感知器算法
感知器算法中与前两种方法不同的是采用了step激活函数
其中 ϕ0(x)=1 ,而且跟前面的方法目标值的表达不同 t∈{−1,+1} ,而不是 t∈{0,1} ,若 x∈C1,t=+1 ,否则 t=−1 。因此对于分类正确的数据 (xn,tn),yntn>0 ,对于误分的数据 yntn<0 ,所以感知器算法的损失函数就采用了
M 是误分的集合,采用随机梯度下降法对上述损失函数求解。

需要注意的是感知器只适用于二分类问题,而且当数据是非线性可分时,迭代不收敛;而且就算对于线性可分的数据,由于每一次迭代都会更改权值,从而影响先前的数据,使原本分类正确的数据在下一轮分类错误,迭代次数增大(当然最后是肯定收敛的)。因此在训练的时候,我们不知道数据到底是非线性可分还是迭代次数不够。
4.2 概率生成模型(Probabilistic Genertive Models)
首先对 p(x|Ck),p(Ck) 建模,然后根据贝叶斯定理计算 p(Ck|x) ,对于二分类问题
对于多类别问题
4.2.1 连续型特征
对于连续型变量,我们可以假设似然函数服从高斯分布,并且所有的类别具有相同的协方差矩阵
对于二分类问题,则有
由上面的推导我们知道,先验概率只出现在bias项,因此改变先验会影响决策平面的偏移。
对于一般K类,则有
上述推导都可以通过贝叶斯定理与替换推出。
4.2.2 最大似然方案
对于二分类问题,假设我们有训练数据 {xn,tn},n=1,…,N ,当 xn∈C1,tn=1;xn∈C2,tn=0,p(C1)=π,p(C2)=1−π 。那么
为了方便,我们令 p(t|π,μ1,μ2,Σ)=∏Nn=1[πN(x|μ1,Σ)]tn[(1−π)N(x|μ2,Σ)]1−tn ,根据 π,μ1,μ2 求其偏导为0的解
4.2.3 离散型特征
假设输入特征为离散型,我们考虑 xi∈{0,1} 的情况,对于D维的特征向量,我们假设每一维特征都相互独立,则有
采用最大似然估计的分析跟连续型特征的类似,所以不再复述。
4.2.4 指数族
由第二章我们知道高斯分布与伯努利分布都可以划分到指数族中,现在我们泛化
如果我们令 u(x)=x ,并且再对 x 缩放,那么
4.3 概率判别模型
在上一节中我们引入了 ak(x) 在生成模型中好像有点多余,那是因为是为了给概率判别模型做铺垫。在生成模型中,我们必须先要对 p(x|Ck),p(Ck) 建模才能得到后验概率,而我们已经知道 y(x)=f(wTϕ(x)) 是一个广义的线性模型,并且如果选择一个特殊的激活函数,如sigmoid、softmax,会得到后验概率,从而我们希望直接定义 p(Ck|x) 的函数来求解。概率判别模型的一个有点是参数少。
4.3.1 基函数
上面讨论的时候,我们都是考虑原始空间上的分类问题,但是在原始空间上的数据可能非线性可分的,但是如果我们经过一个非线性基函数变换后,在变换的空间上,数据是线性可分的。如下图所示
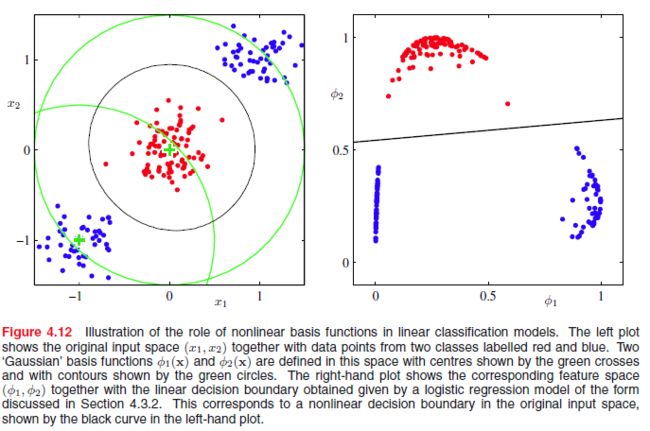
在实际问题中,类别条件密度 p(x|Ck) 会有重叠,因此相应的 p(Ck|x) 有一些 (0,1) 区间的模糊集,这时需要采用decision theory。需要注意的是,非线性变换并不能解决这个问题,甚至有可能引入新的重叠,但是合适的基函数能够使后验概率的建模过程更加简单。
4.3.2 逻辑斯蒂回归(Logistic Regression)
对于二分类问题,上一小节我们推导出
那么 p(C2|x)=1−p(C1|x)
假设 ϕ 的维度是M,那么这个模型的参数只需要M个。而对于生成模型,则需要 2M+M(M+1)/2=M(M+5)/2 个参数。
对于训练集 {ϕn,tn},tn∈{0,1},ϕn=ϕ(xn),n=1,…,N ,那么似然函数为
上式中的 yn=σ(wTϕn) , E(w) 称为交叉熵损失函数。
可以采用随机梯度下降求解。
关于最大似然导致严重过拟合的原因没看明白(todo)
4.3.3 迭代再加权最小二乘(iterative reweighted least square)
由于sigmoid函数, ∇E(w) 不再具有闭式解(closed-form solution)。但是它还是一个凸函数,因此具有一个全局最小解,可以采用Newton-Raphson法来求解
在线性回归中
我们可以看出标准最小二乘法与Newton-Raphson法得到相同的解。
对于logistics回归模型
由于 0<yn<1 ,那么对于任意向量 u,uTRu>0 ,即 R 是正定矩阵。所以 E(w) 是一个凸函数。用Newton-Raphson法对logistics模型求解得
因为 R 不是常数,而依赖于 w ,因此我们需要用上式迭代求解。 R 可以看做是方差。
4.3.4 多类别逻辑斯蒂回归
4.2小节我们推导出,K分类的一般形式为
那么似然函数为
其中 ynk=yk(ϕn) ,那么
我们可以采用随机梯度下降求解 wτ+1k=wτk−η∇wkE(w1,…,wK) ,或者考虑IRLS
4.3.5 Probit Regression
前面我们考虑的激活函数都是logistics或者softmax函数,现在我们考虑其他的激活函数 p(t|a)=f(a) ,当 a>θ,tn=1 ,那么 θ 的任意概率密度 p(θ) ,我们得到

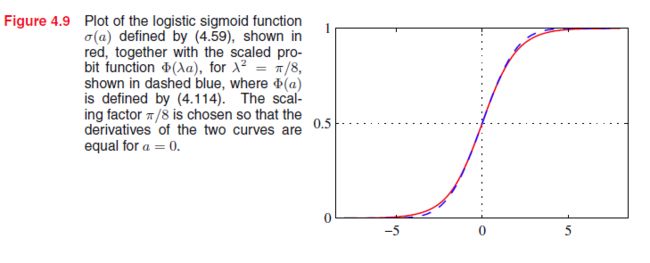
当我们假设 p(θ)=N(θ|0,1) 时,我们有 Φ(a)=∫a−∞N(θ|0,1)dθ , Φ(a) 就被称为probit函数。
之后的求解过程与logistics模型一致,但是需要注意的是probit模型比logistics模型对离群点更敏感。
4.3.6 Canonical link functions
4.4 拉普拉斯逼近(The Laplace Approximation)
在线性回归的时候我们讨论了贝叶斯分析的形式如下
但是在logistics回归中,后验概率不再是高斯分布函数,因此我们希望能够寻求一个高斯分布来近似后验分布。
对于任意一个分布,我们有
Laplace逼近的目标就是找到一个高斯函数 q(z) ,使其均值为 p(z) 的模。第一步是找到模 z0 ,由于高斯分布的对数是变量的二项式函数,那么 lnf(z) 在 z0 附近的泰勒展开式如下

同理对于M为变量也是如此求解
laplace逼近只适用于实数变量。当数据集很大时,Laplace逼近有很好地效果。
4.4.1 模型比较
对于模型 Mi 有参数集 {θi} ,那么这个模型的model evidence为
如果我们假设高斯先验概率的参数是平(broad)的话,那么