吴恩达机器学习练习5——正则化线性回归和偏差/方差
机器学习练习5——正则化线性回归和偏差/方差
- 正则化线性回归
- 数据可视化
- 代价函数
- 拟合
- 偏差、方差折中
- 多项式回归
- 特征归一化
- 正则化
- 为验证集选择lambda
正则化线性回归
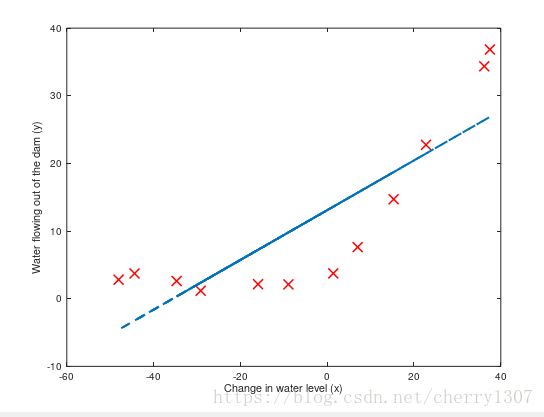
利用水库水位的变化从大坝流出的水量
数据可视化

代价函数
function [J, grad] = linearRegCostFunction(X, y, theta, lambda)
m = length(y); % number of training examples
J = 0;
grad = zeros(size(theta));
h = X*theta;
J = (1/(2*m))*sum((h-y).^2)+lambda/(2*m)*sum(theta(2:end).^2);
temp = theta;
temp(1) = 0;
grad = (1/m)*X'*(h-y) + lambda/m*temp;
grad = grad(:);
end
拟合
偏差、方差折中
function [error_train, error_val] = ...
learningCurve(X, y, Xval, yval, lambda)
m = size(X, 1);
error_train = zeros(m, 1);
error_val = zeros(m, 1);
for i = 1:m
theta = trainLinearReg(X(1:i, :), y(1:i), lambda);
error_train(i) = linearRegCostFunction(X(1:i, :), y(1:i), theta, 0);
error_val(i) = linearRegCostFunction(Xval, yval, theta, 0);
end

多项式回归
线性模型的问题是它对于数据来说太简单了,并导致高偏差。
function [X_poly] = polyFeatures(X, p)
X_poly = zeros(numel(X), p);
for i = 1 : p
X_poly(:,i) = X.^p;
end
matlab语法
n = numel(A);
n= numel(A,条件);
返回数组A中元素个数。若是一幅图像,则numel(A)将给出它的像素数
特征归一化
function [X_norm, mu, sigma] = featureNormalize(X)
mu = mean(X);
X_norm = bsxfun(@minus, X, mu);
sigma = std(X_norm);
X_norm = bsxfun(@rdivide, X_norm, sigma);
end
matlab语法
bsxfun(fun,A,B):
两个数组间元素逐个计算,fun是函数句柄或者m文件,也可以为如下内置函数 :
@plus 加 ; @minus 减 ; @times 数组乘 ; @rdivide 左除 ; @ldivide 右除 。
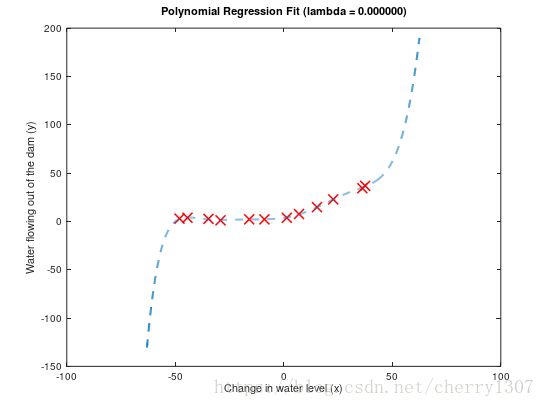

上图可以看出,训练误差小,但验证集误差大————过拟合
正则化






为验证集选择lambda
function [lambda_vec, error_train, error_val] = ...
validationCurve(X, y, Xval, yval)
lambda_vec = [0 0.001 0.003 0.01 0.03 0.1 0.3 1 3 10]';
error_train = zeros(length(lambda_vec), 1);
error_val = zeros(length(lambda_vec), 1);
for i = 1 : length(lambda_vec)
lambda = lambda_vec(i);
[theta] = trainLinearReg(X, y, lambda);
error_train(i) = linearRegCostFunction(X, y, theta, 0);
error_val(i) = linearRegCostFunction(Xval, yval, theta, 0);
end

matlab之numel()函数
matlab之bsxfun()函数