CenterNet: Keypoint Triplts for Object Detection 论文阅读笔记
论文名称:CenterNet: Keypoint Triplts for Object Detection
作者:Kaiwen Duan & Song Bai等
论文链接:https://arxiv.org/abs/1904.08189
代码链接:https://github.com/Duankaiwen/CenterNet
简要概述文章精华
本篇文章是一篇anchor free的目标检测方法,主要是在CornerNet(该篇文章很经典,还没总结,后面补上)的基础上发展而来。文章的主要思想在于:CornerNet中只检测目标的左上角点和右下角点,bounding box错检率会比较高(即检测出目标框但是与目标重合比较少,这也是keypoint检测的常见问题),作者分析错检的主要原因在于-------在进行Corner检测的时候,没有关注bounding box内部的内容信息,所以作者提出了CenterNet,在利用CornerNet检测出bounding box,同时,在bounding box内部检测center keypoint来帮助过滤掉错检框,也就是文章标题所示的Keypoint Triplts,检测三个点,同时,作者提出了center pooling以及cascade corner pooling方法,center pooling用于检测center keypoint,cascade corner pooling用于加强原本corner point的检测,使得corner的检测的时候可以get更多的bounding box内部的内容信息。结果是该网络也取得了精度和召回的双重提升,在COCO上测试,mAP可以达到47%,52-layer hourglass 耗时大约在270ms.
下面详细介绍一下本文的重点
基于anchor的目标检测方法,利用anchor去拟合目标区域取得了很大的成绩,但其也存在一定的缺点:1.需要大量的anchor来保证跟ground truth的重合率,2.anchor一般都是手动设计的,3.手动设计的anchor往往与真实的物体框还是有一定的差距的,4.大量的anchor导致正负样本不均匀问题。
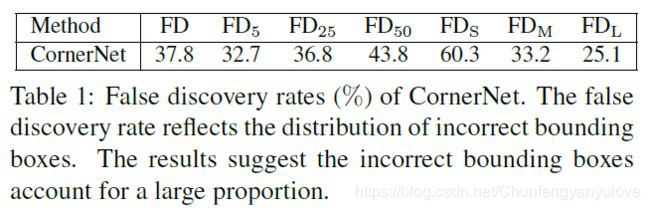
为了尽可能避免使用anchor这些问题,anchor free方法被提出,比较典型的代表就是CornerNet,该网络的灵感来源于关键点检测,通过直接检测目标的左上角点和右下角点的方法来检测目标区域,并且取得了不错的效果。但是其也存在一定的问题,那就是只检测两个点,缺少对中心内容的感知,这样就容易产生检测点的误匹配。如下图Figure 1第一行所示,红框便是错误的框。Table 1展示的是作者统计COCO数据集中CornerNet的错检率(false discovery rates)。可见整体还是比较高的,其中32.7%的检测框与groud truth的IOU重合率小于0.05%,43.8%的小于50%,在小样本中,占比更高,达到了60.3%.
为了解决这个问题,作者提出了centerNet,如下图第二行所示,通过中心keypoint对中心内容进行感知,正常情况,中心keypoint的类别应该跟坐标框的类别相同,利用这种方法来过滤掉错误的匹配框。

本文方法详解
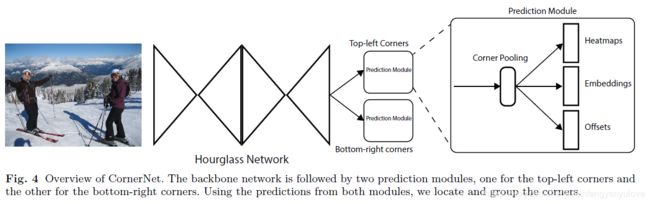
在介绍CenterNet之前,先简单介绍一下CornerNet是怎么做的,下图(Fig. 4)是CornerNet的结构图,backbone采用的是Hourglass结构(这是关键点检测常用的网络),然后会接两个分支,分别用于检测左上角点以及右下角点,每个分支又会输出三个向量,分别对应Heatmaps,Embeddings,Offsets,heatmaps代表的是不同类别的keypoints的位置,以及对应的score,embeddings代表的是哪些keypoints是属于一个bounding box的,offsets是特征图到原图的映射,对keypoints进行微调的。
那既然,已经猜想出问题出在在进行关键点检测的时候,没有get到bounding box内部的信息,除了本文提出的,又有哪些方法可以解决呢?文章中也提到了,可以采用two-stage方法,后面再接一个ROI-pooling,去识别内部信息,但是耗时会增加比较多。
好了,下面进入正题,今天的主角CenterNet.
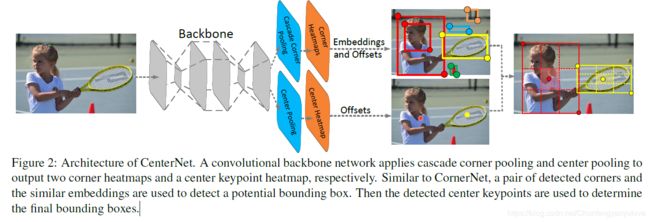
下图Figure 2 所示为CenterNet结构图,对比CornerNet,本文方法多增加了一个分支用于检测目标中心,同时,将目标中心的类别与Corner检测结果相合并。
具体是这么做的呢?
假设我们已经通过上面的网络得到了corners keypoints以及center keypoints的输出,那么后面的逻辑如何融合呢?具体的操作流程如下:
- 选取top-k的bounding box。
- 选取top-k的center keypoints。
- 将center keypoints映射回原图坐标。
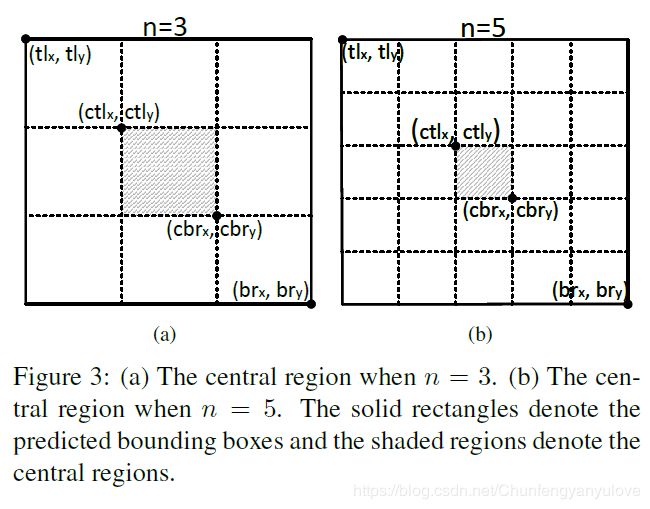
- 计算bounding box的中心区域(如下面图Figure 3中阴影区域所示,如何定义中心区域,下面会有详述),并在其中搜索是否含有center keypoint.
- 如果中心区域存在center keypoint并且keypoint的类别与corner的类别相同,则保留这个bounding box 并且得分修改为三个点的平均分。反之,删除对应的bounding box.
中心区域的定义
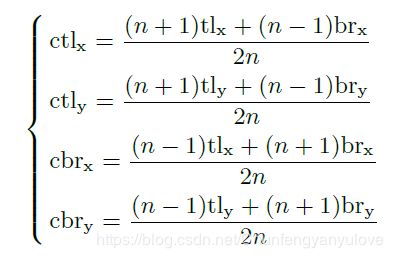
如果中心区域定义的太大,那么对大物体的精度会下降;如果定义的中心区域太小,那么对小物体的召回又会下降。所以本文有提出了一种动态的中心区域选取方法,公式如下,公式看起来挺复杂,但是结果很好理解,就是下图Figure 3,如果n=3,其实就是对bounding box进行三等分,然后去中间的区域,n=5就是对其进行5等分,然后取中间区域。
下面介绍一下本文另外两个创新点,center pooling 以及cascade corner pooling
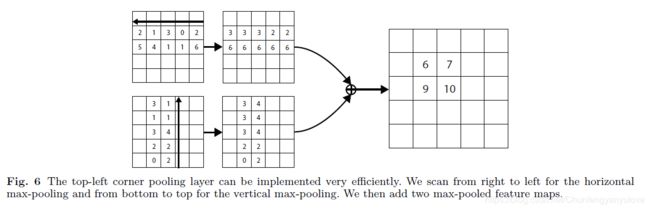
在介绍center pooling以及cascade corner pooling之前,先来回忆一下CornerNet中提到的left pooling以及right pooling。,如下图所示,分别是left pooling以及top pooling,看图应该就一目了然了。
center pooling
center pooling的目的是找到图像中的center keypoint(即行列都比较大的点)
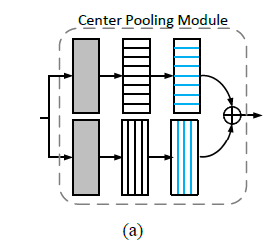
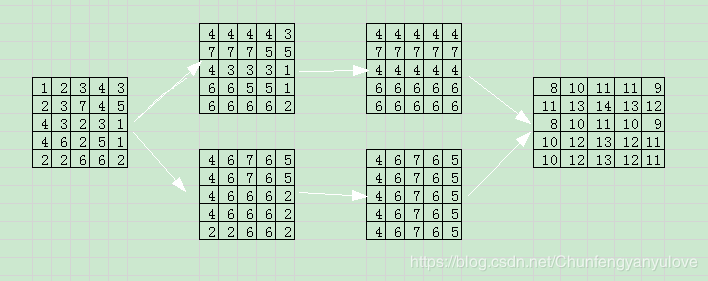
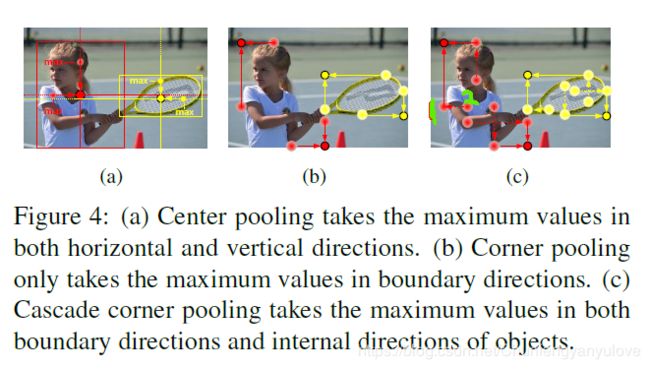
center pooling的做法也很简单,即通过在水平垂直的方向检测特征图的最大值,如图Figure 4a所示为Center pooling示意图。center pooling的具体做法就是如下图,上面代表:left pooling -> right pooling,下面代表 down pooling -> top pooling,然后将结果进行element-add操作。这就找到了中心最大点。
举个例子:
第一行依次是left pooling, right pooling,第二行依次是top pooling down pooling ,最终add到一起,根据值的大小就可以依次选出行和列的的极致情况,显然图中14是最大的,对应到原图7也是最大的。
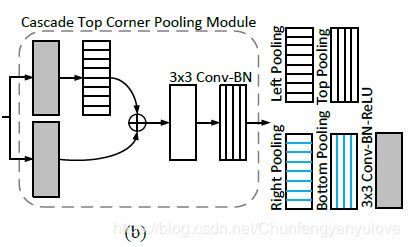
cascade corner pooling
cascade corner pooling在corner pooling的基础上,增加了更多的内部的内容信息。Figure 4:©所示即为cascade corner pooling,主要思想就是不仅仅找到边缘的最大值,同时,将corner内部的内容也加到corner keypoints上面,提高corner keypoints对内容的感知能力,实际的做法就是如下图(b)所示为Top Corner Pooling,首先做一个left pooling,然后与原图求和,后面再过一个top pooling,这样就图中1和2都加到了left-topcorner上,同样的再做left corner pooling, down corner pooling right corner pooling就OK啦。
实验分析
不同网络的精度对比结果如下:

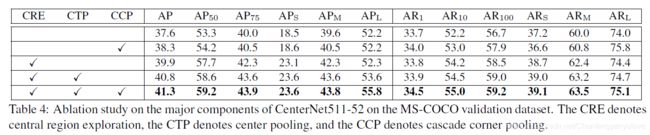
另外,作者做了溶解实验,来对比本文主要的三个关键点的效果提升,其中CRE代表central region exploration ,CTP代表center pooling, CCP代表cascade corner pooling,可见CRE效果提升是最明显的,也侧面说明了增加对中心内容的感知的重要性。
总结
本文是在CornerNet基础上发展来的,主要提到的就是3个重点,一个是中间区域信息的引入思想,另外两个分别是Center Pooling以及Cascade Corner Pooling,思想还是比较好的,值得学习。
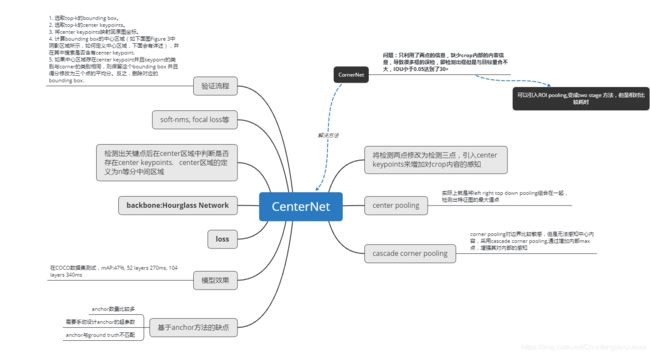
最后附一张知识导图,帮助整理知识点
最后附上center pooling的代码,其他代码可以自行查看开头连接
class center_pool(pool_cross):
def __init__(self, dim):
super(center_pool, self).__init__(dim, TopPool, LeftPool, BottomPool, RightPool) ## 调用pool_cross
class pool_cross(nn.Module):
def __init__(self, dim, pool1, pool2, pool3, pool4):
super(pool_cross, self).__init__()
self.p1_conv1 = convolution(3, dim, 128)
self.p2_conv1 = convolution(3, dim, 128)
self.p_conv1 = nn.Conv2d(128, dim, (3, 3), padding=(1, 1), bias=False)
self.p_bn1 = nn.BatchNorm2d(dim)
self.conv1 = nn.Conv2d(dim, dim, (1, 1), bias=False)
self.bn1 = nn.BatchNorm2d(dim)
self.relu1 = nn.ReLU(inplace=True)
self.conv2 = convolution(3, dim, dim)
self.pool1 = pool1()
self.pool2 = pool2()
self.pool3 = pool3()
self.pool4 = pool4()
def forward(self, x):
# pool 1
p1_conv1 = self.p1_conv1(x)
pool1 = self.pool1(p1_conv1) ## 这里先来个top pooling
pool1 = self.pool3(pool1) ## 接着来个 down pooling
# pool 2
p2_conv1 = self.p2_conv1(x)
pool2 = self.pool2(p2_conv1) ## left pooling
pool2 = self.pool4(pool2) ## right pooling
# pool 1 + pool 2
p_conv1 = self.p_conv1(pool1 + pool2) ## add
p_bn1 = self.p_bn1(p_conv1)
conv1 = self.conv1(x)
bn1 = self.bn1(conv1)
relu1 = self.relu1(p_bn1 + bn1)
conv2 = self.conv2(relu1)
return conv2