ubuntu18.04-ROS-melodic-Cartographer-官方Demo配置和移植到自己的机器人上
简介
最近移动机器人建图过程中发现gmapping并不能满足我们需求,还是得移植cartographer进行测试,于是把测试过程中发现的问题记录下来,一是供大家参考,二是方便自己查阅,还是那句老话,有问题的可以留言咨询或者添加公众号询问。
官方跑包方式
其实官方已经说明的很简介了,按照如下步骤配置即可,存在问题都是些小问题。
step1: 安装工具
sudo apt-get update
sudo apt-get install -y python-wstool python-rosdep ninja-build
step2:创建新的ROS工作空间并初始化src文件夹
mkdir -p cat_ws/src
cd cat_ws
wstool init src
wstool merge -t src https://raw.githubusercontent.com/googlecartographer/cartographer_ros/master/cartographer_ros.rosinstall
wstool update -t src
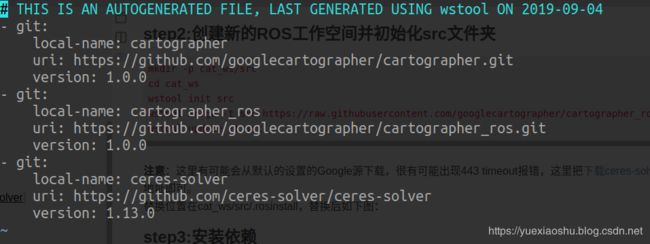
注意:这里有可能会从默认的设置的Google源下载,很有可能出现443 timeout报错,这里把下载ceres-solver地址换成这个仓库地址即可。
替换位置在cat_ws/src/.rosinstall,替换后如下图:
step3:安装依赖
src/cartographer/scripts/install_proto3.sh
sudo rosdep init(注意这里可以跳过,不然有可能会报错,我们已经初始化过无需再初始化)
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
有可能的报错:跳过init哪步即可
ERROR: default sources list file already exists:
/etc/ros/rosdep/sources.list.d/20-default.list
Please delete if you wish to re-initialize
编译并安装
catkin_make_isolated --install --use-ninja
官方ROS bag包demo
这里以跑3D激光雷达为例,其他很多包可以参考官网进行
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_3d/with_intensities/b3-2016-04-05-14-14-00.bag
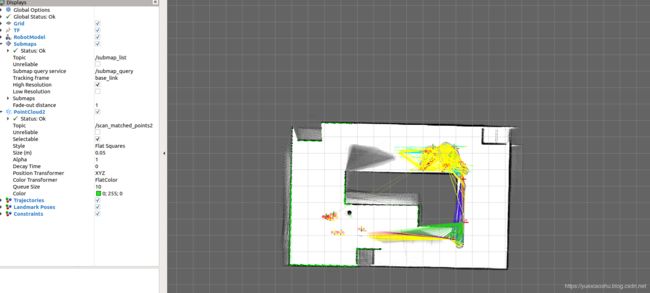
roslaunch cartographer_ros demo_backpack_3d.launch bag_filename:=${HOME}/Downloads/b3-2016-04-05-14-14-00.bag
效果如下:

如何移植到自己机器人?
根据官方给的demo更改自己机器人可用的SLAM launch
由于普通用的基本为2D或者3D激光雷达,如我的机器人使用2D激光,这里按照这个进行简介,我们移植到自己机器人需做三件事:
第一件:一定要把cartography和自己ROS 工作空间隔离开,不然存在问题,两个不是用相同编译器进行。
第二件:更改demo_revo_lds.launch使其匹配自己的机器人
第三件:根据自己机器人配置的TF结构对cartography的配置文件进行更改,这里主要会更改lua脚本,这里使用revo_lds.lua。
更改demo_revo_lds.launch
这里主要删除不需要配置,如跑bag的节点和更改我们自己发布的2D激光雷达的数据,更改后的如下:
更改revo_lsd.lua
主要也是对我们没用到的配置进行删除处理,这里主要看我们发布的坐标系更改后如下:
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "laser_link",
published_frame = "laser_link",
odom_frame = "odom",
provide_odom_frame = true,
publish_frame_projected_to_2d = false,
use_odometry = false,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 1,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 0,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.submaps.num_range_data = 35
TRAJECTORY_BUILDER_2D.min_range = 0.3
TRAJECTORY_BUILDER_2D.max_range = 8.
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 1.
TRAJECTORY_BUILDER_2D.use_imu_data = false
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.linear_search_window = 0.1
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.translation_delta_cost_weight = 10.
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.rotation_delta_cost_weight = 1e-1
POSE_GRAPH.optimization_problem.huber_scale = 1e2
POSE_GRAPH.optimize_every_n_nodes = 35
POSE_GRAPH.constraint_builder.min_score = 0.65
return options
跑个仿真看看
总结
一入slam深似海,革命还有好久,加油大家。