pytorch学习笔记7--循环神经网络、GAN
文章目录
- 循环神经网络
- 序列的表示方法
- RNN Layer的使用
- nn.RNN
- nn.RNNCell
- 预测sin(x)曲线
- train
- predict
- 梯度弥散和梯度爆炸
- gradient clipping
- gradient vanishing
- LSTM 的使用
- LSTMCell 的使用
- 情感分类实战
- GAN
- 损失
- 纳什均衡
- transposed convolution
- WGAN 使用wassertein Distance 代替了Discriminator
- GAN 实战
循环神经网络
序列的表示方法
-
pytorch 中 string的表示方法:word embedding [seq_len,feature_len]、[words,word_vec]、one-hot…
eg:[5,1],[5,100] -
batch
- [word num, b, word_vec]
- [b,word num, word vec]
-
word2vec v.s. Glove
word_to_ix = {"hello":0,"world":1}
lookup_tensor = torch.tensor([word_to_ix["hello"]],dtype=torch.long)
embeds = nn.Embedding(2,5)
hello_embed = embeds(lookup_tensor)
print(hello_embed)
:tensor([[0.6614,0.2669,0.0617,0.6213,-0.4519]],grad_fn=<EmbeddingBackward>)
from torchnlp word_to_vector import Glove
vectors = GloVe()
vectors['hello']
:-1.7494
:0.6242
:...
:-0.6202
:2.0928
:[torch.FloatTensor of size 100]
RNN Layer的使用

nn.RNN
rnn = nn.RNN(input_size=100,hidden_size=20,num_layers=4)
print(rnn)
x = torch.randn(10,3,100)
out,h = rnn(x)
print(out.shape,h.shape)
:torch.Size([10,3,20]) torch.Size([4,3,20])
nn.RNNCell
cell1 = nn.RNNCell(100,20)
h1 = torch.zeros(3,20)
for xt in x:
h1 = cell1(xt,h1)
print(h1.shape)
:torch.Size([3,20])
cell1 = nn.RNNCell(100,30)
cell2 = nn.RNNCell(30,20)
h1 = torch.zeros(3,30)
h2 = torch.zeros(3,20)
for xt in x:
h1 = cell1(xt,h1)
h2 = cell2(h1,h2)
print(h2.shape)
:torch.Size([3,20])
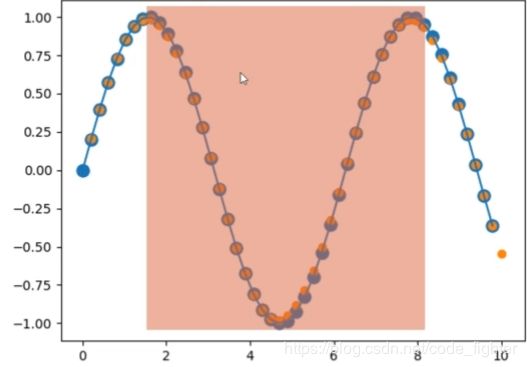
预测sin(x)曲线

start = np.random.radint(3,size=1)[0]
time_steps = np.linspace(start,start+10,num_time_steps)
data = np.sin(time_steps)
data = data.reshape(num_time_steps,1)
x = torch.tensor(data[:-1]).float().view(1,num_time_steps -1,1)
y = torch.tensor(data[1:]).float().view(1,num_time_steps -1,1)
class Net(nn.Module):
def __init__(self,):
super(Net,self).__init__()
self.rnn = nn.RNN(
input_size = input_size,
hidden_size = hidden_size,
num_layers = 1,
batch_first = True,
)
self.linear = nn.Linear(hidden_size,output_size)
def forward(self,x,hidden_prew):
out,hidden_prev = self.rnn(x,hidden_prev)
out = out.view(-1,hidden_size)
out = self.linear(out)
out = out.unsqueeze(dim=0)
return out, hidden_prev
train
model = Net()
criterion = nn.MSELoss()
optimizer = optim.Adam(model.parameters(),lr)
hidden_prev = torch.zeros(1,1,hidden_size)
for iter in range(6000):
start = np.random.randint(10,size=1)[0]
time_steps = np.linspace(start,start+10,num_time_steps)
data = np.sin(time_steps)
data = data.reshape(num_time_steps,1)
x = torch.tensor(data[:-1]).float().view(1,num_time_steps-1,1)
y=torch.tensor(data[1:]).float().view(1,num_time_steps-1,1)
output,hidden_prev = model(x,hidden_prev)
hidden_prev = hidden_prev.detach()
loss = criterion(output,y)
model.zero_grad()
loss.backward()
optimizer.step()
if iter %100 == 0:
print("Iteration :{ } loss { }".format(iter,loss.item()))
predict
predictions = []
input = x[:,0,:]
for _ in range(x.shape[1])
input = input.view(1,1,1)
(pred,hidden_prev) = model(input,hidden_prev)
input = pred
predictions.append(pred.detach().numpy().ravel()[0])
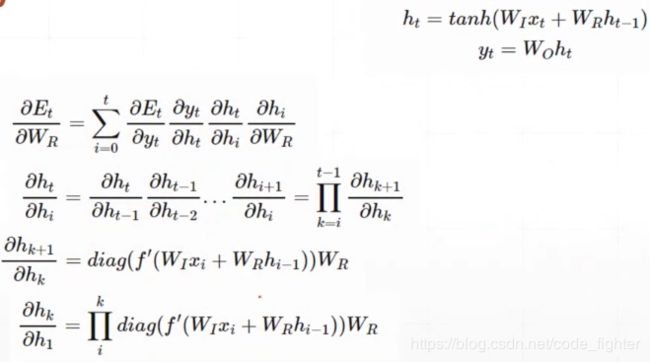
梯度弥散和梯度爆炸
gradient clipping
loss = criterion(output,y)
model.zero_grad()
loss.backward()
for p in model.parameters():
print(p.grad.norm())
torch.nn.utils.clip_grad_norm(p,10)# 把梯度clipping到0~10 的范围
optimizer.step()
gradient vanishing
梯度长时间得不到更新
LSTM解决梯度弥散
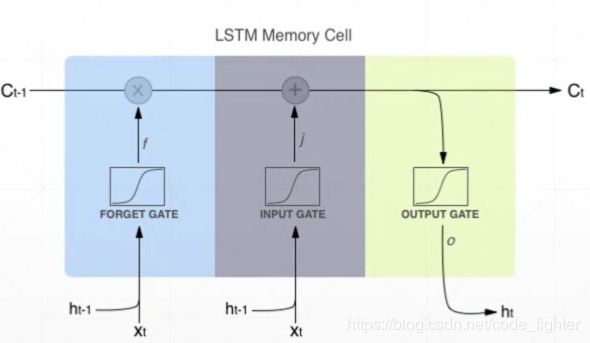
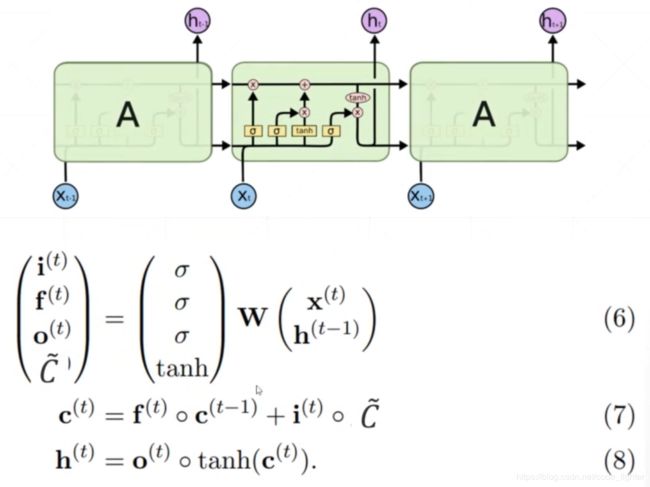
LSTM 的使用
lstm = nn.LSTM(input_size=100, hidden_size=20,num_layers=4)
print(lstm)
x = torch.randn(10,3,100)
out,(h,c) = lstm(x)
print(out.shape,h.shape,c.shape)
: torch.Size([10,3,20]) torch.Size([4,3,20]) torch.Size([4,3,20])
LSTMCell 的使用
print('one layer lstm')
cell = nn.LSTMCell(input_size=100,hidden_size=20)
h = torch.zeros(3,20)
c = torch.zeros(3,20)
for xt in x :
h,c = cell(xt,[h,c])
print(h.shape,c.shape)
: torch.Size([3,20]) torch.Size([3,20])
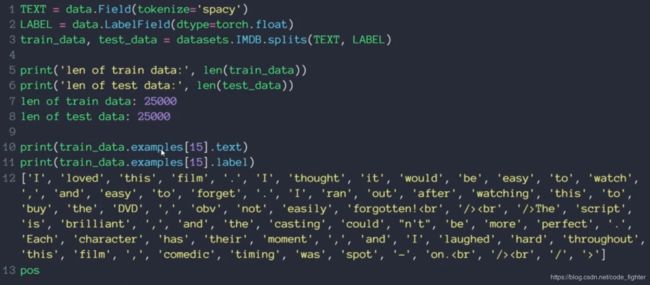
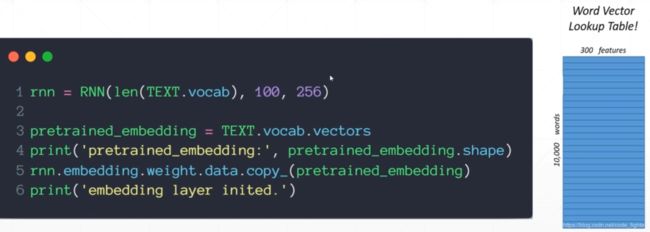
情感分类实战

class RNN(nn.Module):
def __init__(self,vocab_size,embedding_dim,hidden_dim):
super(RNN,self).__init__()
# [0-10001] =>[100]
self.embedding = nn.Embedding(vocab_size,embedding_dim)
#[100] => [256]
self.rnn = nn.LSTM(embedding_dim,hidden_dim,num_layers=2,bidirectional=True,dropout=0.5)
#[256*2] = > [1]
self.fc = nn.Linear(hidden_dim*2,1)
self.dropout = nn.Dropout(0.5)
def forward(self,x):
# [seq,b,1] => [seq,b,100]
embedding = self.dropout(self.embedding(x))
#output:[seq,b,hid_dim*2]
#hidden/h: [num_layers*2,b,hid_dim]
# cell/c: [num_layers*2,b,hid_dim]
output,(hidden,cell) = self.rnn(embedding)
# [num_layers*2,b,hid_dim] => 2 of [b,hid_dim] => []b,hid_dim*2]
hidden = torch.cat([hidden[-2],hidden[-1]],dim=1)
# [b,did_dim*2] => [b,1]
hidden = self.dropout(hidden)
out = self.fc(hidden)
return out
def train(rnn,iterator,optimizer,criteon):
avg_acc = []
rnn.train()
for i , batch in enumerate(iterator):
# [seq,b] => [b,1] => [b]
pred = rnn(batch.text).squeeze(1)
loss = criteon(pred,batch.label)
acc = binary_acc(pred,batch.label).item()
avg_acc.append(acc)
optimizer.zero_grad()
loss.backward()
optimizer.step()
def binary_acc(preds,y):
preds = torch.round(torch.sigmoid(preds))
correct = torch.eq(preds,y).float()
acc = correct.sum()/len(correct)
return acc
def eval(rnn,iterator,criteon):
avg_acc = []
rnn.eval()
with torch.no_grad():
for batch in iterator:
# [b,1] =>[b]
pred = rnn(batch.text).squeeze(1)
loss = criteon(pred,batch.label)
acc = binary_acc(pred,batch.label).item()
avg_acc.append(acc)
avg_acc = np.array(avg_acc).mean()
print('>>test:',avg_acc)
GAN
损失
m i n G m a x D L ( D , G ) = E x p r ( x ) [ l o g D ( x ) ] + E x p z ( z ) [ l o g ( 1 − D ( G ( z ) ) ) ] = E x p r ( x ) [ l o g D ( x ) ] + E x p g ( x ) [ l o g ( 1 − D ( x ) ) ] min_G max_D L(D,G) =E_{x~p_r(x)}[logD(x)] + E_{x~p_z(z)}[log(1-D(G(z)))] = E_{x~p_r(x)}[logD(x)] + E_{x~p_g(x)}[log(1-D(x))] minGmaxDL(D,G)=Ex pr(x)[logD(x)]+Ex pz(z)[log(1−D(G(z)))]=Ex pr(x)[logD(x)]+Ex pg(x)[log(1−D(x))]
纳什均衡
- where will D converge, given fixed G
- for G fixed ,the optimal discriminator D is D G ∗ ( x ) = P d a t a ( x ) P d a t a ( x ) + p g ( x ) D_G^*(x) = \frac{P_{data}(x)}{P_{data}(x) + p_g(x)} DG∗(x)=Pdata(x)+pg(x)Pdata(x)
- proof. the training criterion for the discriminator D, given any generator G, is to maximize the quantity V(G,D)
- V ( G , D ) = ∫ x P d a t a ( x ) l o g ( D ( x ) ) d x + ∫ z P z ( z ) l o g ( 1 − D ( g ( z ) ) ) d z = ∫ x P d a t a ( x ) l o g ( D ( x ) ) + P g ( x ) l o g ( 1 − D ( x ) ) d x V(G,D) = \int_x{P_{data}(x)log(D(x))dx} + \int_z{P_z(z)log(1-D(g(z)))dz} = \int_x{P_{data}(x)log(D(x))+P_g(x)log(1-D(x))dx} V(G,D)=∫xPdata(x)log(D(x))dx+∫zPz(z)log(1−D(g(z)))dz=∫xPdata(x)log(D(x))+Pg(x)log(1−D(x))dx
- 因为G 是固定的,所以令 P d a t a ( x ) = A , P g ( x ) = B P_{data}(x) = A,P_g(x) = B Pdata(x)=A,Pg(x)=B
- f ( x ~ ) = A l o g x ~ + b l o g ( 1 − x ~ ) f(\tilde{x}) = Alog \tilde{x}+blog(1- \tilde{x}) f(x~)=Alogx~+blog(1−x~)
- 令 d f ( x ~ ) d x ~ = A 1 l n 10 1 x ~ − B 1 l n 10 1 1 − x ~ = 1 l n 10 ( A x ~ − B 1 − x ~ ) = 1 l n 10 A − ( A + B ) x ~ x ~ ( 1 − x ~ ) = 0 \frac{df(\tilde{x})}{d \tilde{x}} = A \frac{1}{ln10}\frac{1}{\tilde{x}} - B \frac{1}{ln10}\frac{1}{1-\tilde{x}}=\frac{1}{ln10}(\frac{A}{\tilde{x}}-\frac{B}{1-\tilde{x}})=\frac{1}{ln10}\frac{A-(A+B)\tilde{x}}{\tilde{x}(1-\tilde{x})}=0 dx~df(x~)=Aln101x~1−Bln1011−x~1=ln101(x~A−1−x~B)=ln101x~(1−x~)A−(A+B)x~=0
- 所以: D ∗ ( x ) = x ~ ∗ = A A + B = p r ( x ) p r ( x ) + p g ( x ) ∈ [ 0 , 1 ] D^*(x) = \tilde{x}^* = \frac{A}{A+B} = \frac{p_r(x)}{p_r(x)+p_g(x)} \in [0,1] D∗(x)=x~∗=A+BA=pr(x)+pg(x)pr(x)∈[0,1]
- KL Divergence vs. JS Divergence
- D K L ( p ∣ ∣ q ) = ∫ x p ( x ) l o g p ( x ) q ( x ) d x D_{KL}(p||q) = \int_x p(x)log{\frac{p(x)}{q(x)}}dx DKL(p∣∣q)=∫xp(x)logq(x)p(x)dx
- D J S ( p ∣ ∣ q ) = 1 2 D K L ( p ∣ ∣ p + q 2 ) + 1 2 D K L ( q ∣ ∣ f r a c p + q 2 ) D_{JS}(p||q) = \frac{1}{2}D_{KL}(p||\frac{p+q}{2})+\frac{1}{2}D_{KL}(q||frac{p+q}{2}) DJS(p∣∣q)=21DKL(p∣∣2p+q)+21DKL(q∣∣fracp+q2) 主要解决kl不对称的问题
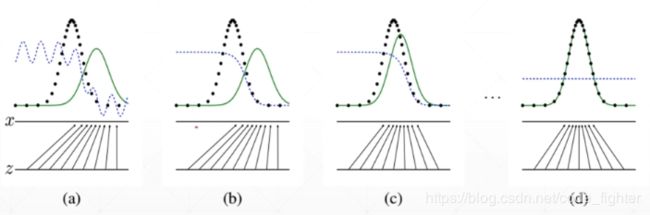
- where will G converge,after optimal D
D J S ( P r ∣ ∣ P g ) = 1 2 D K L ( P r ∣ ∣ P r + P g 2 ) + 1 2 D K L ( P g ∣ ∣ P r + P g 2 ) D_{JS}(P_r||P_g) = \frac{1}{2}D_{KL}(P_r||\frac{P_r+P_g}{2})+\frac{1}{2}D_{KL}(P_g||\frac{P_r+P_g}{2}) DJS(Pr∣∣Pg)=21DKL(Pr∣∣2Pr+Pg)+21DKL(Pg∣∣2Pr+Pg)
= 1 2 ( l o g 2 + ∫ x P r ( x ) l o g P r ( x ) P r + P g ( x ) ) + 1 2 ( l o g 2 + ∫ x P g ( x ) l o g ( P g ( x ) P r + P g ( x ) ) d x =\frac{1}{2}(log2+ \int_x P_r(x)log\frac{P_r(x)}{P_r+P_g(x)})+\frac{1}{2}(log2 + \int_x P_g(x)log(\frac{P_g(x)}{P_r+P_g(x)})dx =21(log2+∫xPr(x)logPr+Pg(x)Pr(x))+21(log2+∫xPg(x)log(Pr+Pg(x)Pg(x))dx
= 1 2 ( l o g 4 + L ( G , D ∗ ) ) =\frac{1}{2}(log4 + L(G,D^* )) =21(log4+L(G,D∗))
所以
L ( G , D ∗ ) = 2 D J S ( P r ∣ ∣ P g ) − 2 l o g 2 L(G,D^* ) = 2D_{JS}(P_r||P_g)-2log2 L(G,D∗)=2DJS(Pr∣∣Pg)−2log2
D J S ( P r ∣ ∣ P g ) ≥ 0 D_{JS}(P_r||P_g)\ge 0 DJS(Pr∣∣Pg)≥0
P r = P g P_r=P_g Pr=Pg
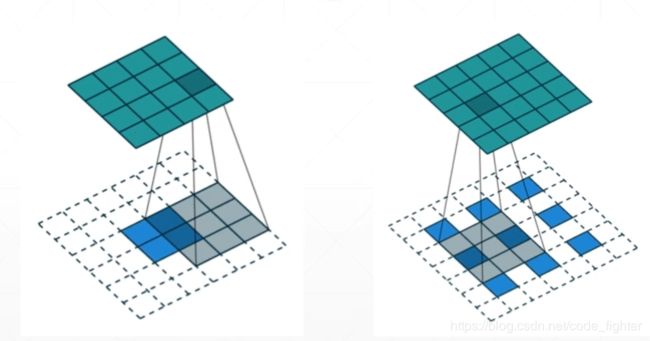
transposed convolution
WGAN 使用wassertein Distance 代替了Discriminator
GAN 实战
import numpy as np
import visdom
import random
from torch import nn, optim,autograd
import torch
from matplotlib import pyplot as plt
h_dim = 400
batchsz = 512
viz = visdom.Visdom()
class Generator(nn.Module):
def __init__(self):
super(Generator,self).__init__()
self.net = nn.Sequential(
nn.Linear(2,h_dim),
nn.ReLU(True),
nn.Linear(h_dim,h_dim),
nn.ReLU(True),
nn.Linear(h_dim,h_dim),
nn.ReLU(True),
nn.Linear(h_dim,2)
)
def forward(self, x):
output = self.net(x)
return output
class Discriminator(nn.Module):
def __init__(self):
super(Discriminator,self).__init__()
self.net = nn.Sequential(
nn.Linear(2,h_dim),
nn.ReLU(True),
nn.Linear(h_dim,h_dim),
nn.ReLU(True),
nn.Linear(h_dim,h_dim),
nn.ReLU(True),
nn.Linear(h_dim,1),
nn.Sigmoid()
)
def forward(self, x):
output = self.net(x)
return output
def data_generator():
scale = 2.
centers = [(1,0),(-1,0),(0,1),(0,-1),(1./np.sqrt(2),1./np.sqrt(2)),
(1./np.sqrt(2),-1./np.sqrt(2)),(-1./np.sqrt(2),1./np.sqrt(2))
,(-1./np.sqrt(2),-1./np.sqrt(2))]
while True:
dataset = []
for i in range(batchsz):
point = np.random.randn(2)*0.02
center = random.choice(centers)
point[0] += center[0]
point[1] += center[1]
dataset.append(point)
dataset = np.array(dataset).astype(np.float32)
dataset /= 1.414
yield dataset
def main():
torch.manual_seed(23)
np.random.seed(23)
data_iter = data_generator()
x = next(data_iter)
G = Generator().cuda()
D = Discriminator().cuda()
optim_G = optim.Adam(G.parameters(),lr=5e-4,betas=(0.5,0.9))
optim_D = optim.Adam(D.parameters(),lr=5e-4,betas=(0.5,0.9))
for epoch in range(50000):
for _ in range(5):
# train on real data
x = next(data_iter)
x = torch.from_numpy(x).cuda()
predr = D(x)
# max predr,min lossr
lossr = predr.mean()
z = torch.randn(batchsz,2).cuda()
xf = G(z).detach()
predf = D(xf)
lossf = predf.mean()
# aggregate all
loss_D = lossr + lossf
# optimize
optim_D.zero_grad()
loss_D.backward()
optim_D.step()
# 2 train Generator
z = torch.randn(batchsz,2).cuda()
xf = G(z)
predf = D(xf)
loss_G = predf.mean()
# optimize
optim_G.zero_grad()
loss_G.backward()
optim_G.step()