opencv3.2——小试牛刀(1):使用鼠标选择ROI进行SURF匹配
1.目的
匹配图片的时候,总有其他物体干扰着匹配成功率。所以选择需要的物体进行匹配就现得很重要。所以,本文尝试选择了使用鼠标交互的方法选择物体,并进行运算速度快而且匹配率高的SURF算法进行匹配。本程序优点:鼠标交互,重复选择物体框直到选择到最佳物体框。
2.代码实现
#include
#include
#include"opencv2/xfeatures2d.hpp"
#include
using namespace cv;
using namespace std;
using namespace cv::xfeatures2d;
using namespace cv::ml;
#define WINDOW_NAME "【程序窗口】"
void on_MouseHandle(int event, int x, int y, int flags, void*param);
void DrawRectangle(cv::Mat& img, cv::Rect box);
Rect g_rectangle;
bool g_bDrawingBox = false;//是否进行绘制
RNG g_rng(12345);
int main(int argc, char **argv)
{
//【1】准备参数
Mat srcImage = imread("1.jpg");
g_rectangle = Rect(-1, -1, 0, 0);
//【2】设置鼠标操作回调函数
namedWindow(WINDOW_NAME);
setMouseCallback(WINDOW_NAME, on_MouseHandle, (void*)&srcImage);
while (1)
{
if (waitKey(10) == 27) { break; }//esc键,程序退出
imshow(WINDOW_NAME, srcImage);
}
//ROI
Mat imageROI = srcImage(g_rectangle);
Mat imageROIG;
//预备
cvtColor ( imageROI ,imageROIG, CV_RGB2GRAY);
//SURF
Mat a = imageROIG; //读取灰度图像
Mat b = imread("2.jpg", 0);
Ptr surf; //创建方式和opencv2中的不一样
// Ptr sift;
surf = SURF::create(900, 5, 4); //阈值
BFMatcher matcher; //匹配器
Mat c, d;
vector key1, key2;
vector matches;
//结果为一个Mat矩阵,它的行数与特征点向量中元素个数是一致的。每行都是一个N维描述子的向量
surf->detectAndCompute(a, Mat(), key1, c); //检测关键点和匹配描述子
surf->detectAndCompute(b, Mat(), key2, d);
matcher.match(c, d, matches); // 匹配,得到匹配向量
sort(matches.begin(), matches.end()); // 匹配点排序
vector< DMatch > good_matches; // 匹配两幅图像的描述子
int ptsPairs = min(50, (int)(matches.size() * 0.15));
cout << ptsPairs << endl;
for (int i = 0; i < ptsPairs; i++) // 将匹配较好的特征点存入good_matches中
{
good_matches.push_back(matches[i]);
}
Mat outimg;
drawMatches( // 绘制匹配点
a, // 原图像1
key1, // 原图像1的特征点
b, // 原图像2
key2, // 原图像2的特征点
good_matches, // 原图像1的特征点匹配原图像2的特征点[matches[i]]
outimg, // 输出图像具体由flags决定
Scalar::all(-1), // 匹配的颜色(特征点和连线),若matchColor==Scalar::all(-1),颜色随机
Scalar::all(-1), // 单个点的颜色,即未配对的特征点,若matchColor==Scalar::all(-1),颜色随机
vector(), // Mask决定哪些点将被画出,若为空,则画出所有匹配点
DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS); //Fdefined by DrawMatchesFlags
vector obj;
vector scene;
for (size_t i = 0; i < good_matches.size(); i++)
{
////good_matches[i].queryIdx保存着第一张图片匹配点的序号,keypoints_1[good_matches[i].queryIdx].pt.x 为该序号对应的点的x坐标
obj.push_back(key1[good_matches[i].queryIdx].pt);
scene.push_back(key2[good_matches[i].trainIdx].pt);
}
vector scene_corners(4);
vector obj_corners(4);
obj_corners[0] = Point(0, 0);
obj_corners[1] = Point(a.cols, 0);
obj_corners[2] = Point(a.cols, a.rows);
obj_corners[3] = Point(0, a.rows);
Mat H = findHomography( // 在两个平面之间寻找单映射变换矩阵
obj, // 在原平面上点的坐标
scene, // 在目标平面上点的坐标
4); // 用于计算单映射矩阵的方法
perspectiveTransform( // 向量组的透视变换
obj_corners, // 输入两通道或三通道的浮点数组,每一个元素是一个2D/3D 的矢量转换
scene_corners, // 输出和src同样的size和type
H); // 3x3 或者4x4浮点转换矩阵
// 绘制
line(outimg, scene_corners[0] + Point2f((float)a.cols, 0), scene_corners[1] + Point2f((float)a.cols, 0), Scalar(0, 255, 0), 2, LINE_AA);
line(outimg, scene_corners[1] + Point2f((float)a.cols, 0), scene_corners[2] + Point2f((float)a.cols, 0), Scalar(0, 255, 0), 2, LINE_AA);
line(outimg, scene_corners[2] + Point2f((float)a.cols, 0), scene_corners[3] + Point2f((float)a.cols, 0), Scalar(0, 255, 0), 2, LINE_AA);
line(outimg, scene_corners[3] + Point2f((float)a.cols, 0), scene_corners[0] + Point2f((float)a.cols, 0), Scalar(0, 255, 0), 2, LINE_AA);
namedWindow("匹配图", 0);
imshow("匹配图", outimg);
waitKey(-1);
return 0;
}
void on_MouseHandle(int event, int x, int y, int falgs, void* param)
{
Mat& image = *(cv::Mat*)param;
switch (event)
{
//鼠标移动消息
case EVENT_MOUSEMOVE:
{
if (g_bDrawingBox) //标识符为真,则记录下长和宽到Rect型变量中
{
g_rectangle.width = x - g_rectangle.x;
g_rectangle.height = y - g_rectangle.y;
}
}
break;
//左键按下信号
case EVENT_LBUTTONDOWN:
{
cout << " EVENT_LBUTTONDOWN" << endl;
g_bDrawingBox = true;
g_rectangle = Rect(x, y, 0, 0);//记录起点
}
break;
//左键抬起信号
case EVENT_LBUTTONUP:
{
cout << " EVENT_LBUTTONUP" << endl;
g_bDrawingBox = false;
//对宽高小于0的处理
if (g_rectangle.width < 0)
{
g_rectangle.x += g_rectangle.width;
g_rectangle.width *= -1;
}
if (g_rectangle.height < 0)
{
g_rectangle.y += g_rectangle.height;
g_rectangle.height *= -1;
}
//调用绘制函数
DrawRectangle(image, g_rectangle);
}
break;
}
}
void DrawRectangle(cv::Mat& img, cv::Rect box)
{
rectangle(img, box.tl(), box.br(), Scalar(0, 0, 225));
} 效果图
(1)不同的物体匹配的效果图:
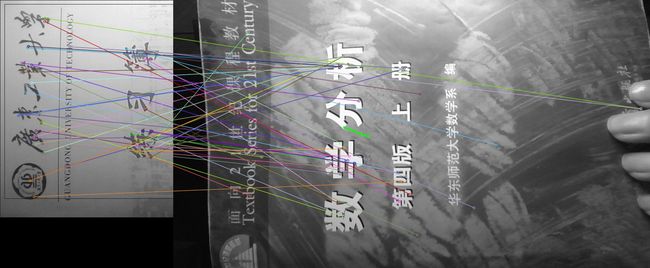
匹配结果显示不是同一物体,无识别框形成,识别线凌乱。
(2)同一物体,旋转拍摄得不同画面,两个画面进行匹配的效果图:
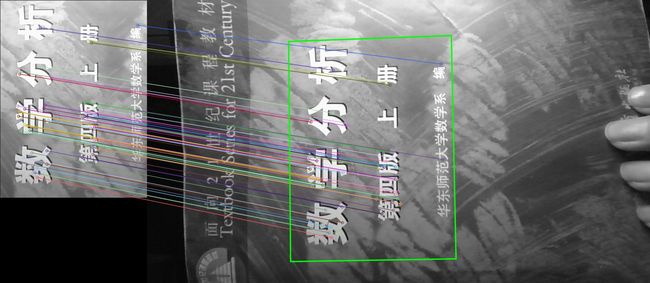
匹配成功,识别框明显,识别线整齐。
注意事项
1.图片的像素要较高。(电脑摄像头以上,电脑摄像头拍摄的图片要靠近摄像头,或者匹配的物体特征明显如文字。)
2.没有xfreatures2d模块的访客可以借鉴博主以前的博客,opencv3.2的xfeatures2d模块(nofree模块)现放置到第三方库。
3.鼠标交互可以重复选择所需识别物体框,取最后一次物体框为最终物体框。按esc键退出选择物体框,并进行识别,识别窗口按任意键退出,程序结束。
心得体会
opencv的函数库比较强大,大大减少了编写程序的复杂程度。对于初学者而言是不错的机器视觉入门的途径。