- 探索TriCore架构:AURIX芯片的强大内核
裴辰垚Simone
探索TriCore架构:AURIX芯片的强大内核g_tricore_architecture项目地址:https://gitcode.com/gh_mirrors/gt/g_tricore_architecture项目介绍TriCore架构是英飞凌(Infineon)公司开发的一种高性能、低功耗的嵌入式处理器架构,广泛应用于汽车电子、工业控制和消费电子等领域。AURIX系列芯片是基于TriCore
- 有奖直播 | NXP S32K31X 系列 ASIL-B 车身应用方案介绍
WPG大大通
研讨会大大通研讨会汽车车身控制芯片智能
随着汽车智能化、电动化的快速发展,车身控制模块(BCM)作为汽车电子系统的核心组成部分,正面临着更高的功能安全要求和更复杂的系统集成需求。NXPS32K31X系列微控制器凭借其高性能、低功耗和符合ASIL-B功能安全等级的特性,成为车身控制应用的理想选择。本次研讨会将深入探讨S32K31X系列在车身控制中的应用方案,帮助开发者快速掌握相关技术,缩短产品开发周期。研讨会内容包含:一、S32K31X系
- CAN协议简介:从基础到高级应用
New_Teen
嵌入式硬件学习笔记嵌入式硬件物联网
文章目录引言一、CAN协议概述1.1基本特性1.2典型应用场景二、物理层解析2.1信号规范2.2网络拓扑三、数据链路层机制3.1帧类型对比3.2非破坏性仲裁3.3错误处理机制四、帧结构详解4.1标准数据帧结构4.2扩展帧结构五、高级特性5.1CANFD协议增强5.2报文过滤机制六、同步与定时6.1位时间组成6.2同步规则七、开发实践要点结语引言在现代工业控制和汽车电子领域,CAN(Controll
- stm32第四天控制蜂鸣器
Do vis824
stm32嵌入式硬件单片机
一:1.蜂鸣器的种类蜂鸣器是一种常用的电子发声元器件,采用直流电压供电。广泛应用于计算机,打ED机,报警器,电子玩具,汽车电子设备灯等产品中常见的蜂鸣器可分为有源蜂鸣器和无源蜂鸣器。2.蜂鸣器的控制方式有源蜂鸣器:内部有震荡源,只要通电即可自动发出固定频率的声音。(频率固定无法控制音色)无源蜂鸣器:内部无震荡源,需要外部脉冲信号驱动发声,声音频率可变。(可改变频率来改变音色)3.区分蜂鸣器从外观上
- AUTOSAR与arxml的文档解析
dont__cry
c语言autosar
如下是文档脑图一、文档概述该文档是AUTOSAR经典平台的应用接口用户指南,主要解释**AlTable(应用接口表)**的结构、方法论及相关技术细节,帮助开发者理解如何通过标准化接口实现软件组件的互操作性。关键内容目的:定义并发布稳定、广泛接受的汽车电子系统应用接口,支持跨厂商软件组件的通信。结构:包含元模型表示、兼容性管理、生命周期状态、视图概念及XML生成规则等。二、核心概念与示例1.AUTO
- 车载通信架构 --- UB位更新策略记录
车载诊断技术
车载通信架构架构车载通信架构UB位更新策略记录电子电气架构
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师:简单,单纯,喜欢独处,独来独往,不易合同频过着接地气的生活,除了生存温饱问题之外,没有什么过多的欲望,表面看起来很高冷,内心热情,如果你身边有这样灵性的人,一定要好好珍惜他们眼中有神有光,干净,给人感觉很舒服,有超强的感知能力有形的无形的感知力很强,能感知人的内心变化喜欢独处,好静,
- 电子电气架构 --- 汽车面对软件怎么“破局“?
车载诊断技术
思考汽车行业架构汽车汽车面对软件怎么破局电子电器框架人工智能数据库智能电动汽车概述
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师:人生是一场骗局,最大的任务根本不是什么买车买房,也不是及时行乐,这就是欲望,不是理想,是把自己对生命的希望寄托在外物上,正确的做法应该是内求,无论遇到什么坎坷都能够随时调动自己的能力,出生没办法选择,婚姻也只能靠运气,唯一能让自己过好这一生的本领就是看待世界的方法,这世界看似纷纷扰扰
- 电子电气架构 -- 您不知道OTA的那些事?
车载诊断技术
汽车行业思考架构网络车载充电器(OBC)人工智能电子电器框架汽车
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师:所谓鸡汤,要么蛊惑你认命,要么怂恿你拼命,但都是回避问题的根源,以现象替代逻辑,以情绪代替思考,把消极接受现实的懦弱,伪装成乐观面对不幸的豁达,往不幸上面喷“香水”来掩盖问题。无人问津也好,技不如人也罢,你都要试着安静下来,去做自己该做的事.而不是让内心的烦躁、焦虑、毁掉你本就不多的
- 天吉智芯「星核」智能充气泵 —— 以芯为核,定义车载充气新标杆
天吉智芯
充气泵打气泵一体机人工智能单片机嵌入式硬件
一、品牌基因:12年车规级芯片的技术沉淀天吉智芯(TJX-CHIP)作为深圳天吉芯技术旗下高端品牌,深耕汽车电子领域12年,累计交付超500万颗车规级MCU芯片。「星核」充气泵是品牌首款终端产品,搭载自主研发的TJX8F003Pro车规级芯片(IATF16949认证),以芯片级定制重构充气泵的智能边界——不止是工具,更是汽车安全生态的智能终端。二、产品定位:全场景胎压管家,重新定义「可靠」目标用户
- MCU详解:嵌入式系统的“智慧之心”
绿算技术
MCU架构介绍单片机嵌入式硬件
在现代电子设备中,MCU(MicrocontrollerUnit,微控制器)扮演着至关重要的角色。从智能家居到工业控制,从汽车电子到医疗设备,MCU以其小巧、低功耗和高集成度的特点,成为嵌入式系统的核心组件。由绿算技术带领着大家一起领略MCU的风采。MCU的功能:嵌入式系统的“全能选手”MCU是一种集成了处理器、存储器和外设接口的微型计算机系统,其核心功能包括:1.数据处理·算术与逻辑运算:MCU
- 应用场景下的芯片分类
绿算技术
芯片类型科普探索html人工智能科技
从数据中心级别的高性能芯片,到消费类产品级别的日常应用芯片;从工业类产品级别的稳定可靠芯片,到汽车电子级别的高要求芯片;再到军工和国防级别的专用芯片,不同类型的芯片正以其独特的功能和应用场景,满足着多样化的需求。电路类型下的芯片分类·数字电路芯片:处理数字信号,广泛应用于计算机、通信设备等领域。·模拟电路芯片:处理模拟信号,常用于音频、视频处理等场景。·数模混合电路芯片:兼具数字和模拟信号处理功能
- AUTOSAR从入门到精通-汽车电子电气架构(EEA)
格图素书
汽车
目录前言算法原理EEA发展历程->分布式架构(distributed):->基于域的集中式架构(DCUbasedcentralized):->基于域融合的带状架构(DCUfusionbasedzonal):什么是电子电气架构?EEA的特点EEA发展的三大阶段特征第一阶段:分布式架构第二阶段:基于域的集中式架构(转型中)第三阶段:基于域融合的带状架构(未来趋势)车载电子电气架构作用EEA开发工作内容
- 高安全可靠MCU芯片AS32X601应用解析
国科安芯
产品单片机嵌入式硬件risc-v架构fpga开发
1.AS32X601简介AS32X601系列是国科安芯基于32位RISC-V指令集研发的高性能MCU产品,具备高安全、低失效、多接口、低成本等核心优势。该系列包含工业级(AS32I601ZIT6)、车规级(AS32A601ZIT3)、企业宇航级(AS32S601ZIT2)及企军级(AS32M601ZIT2)四个型号,覆盖工业控制、汽车电子、航天及军工等严苛场景。其关键特性包括:高安全设计:支持AS
- 天吉智芯「星核」智能充气泵 —— 以芯为核,定义车载充气新标杆
天吉智芯
人工智能
一、品牌基因:12年车规级芯片的技术沉淀天吉智芯(TJX-CHIP)作为深圳天吉芯技术旗下高端品牌,深耕汽车电子领域12年,累计交付超500万颗车规级MCU芯片。「星核」充气泵是品牌首款终端产品,搭载自主研发的TJX8F003Pro车规级芯片(IATF16949认证),以芯片级定制重构充气泵的智能边界——不止是工具,更是汽车安全生态的智能终端。二、产品定位:全场景胎压管家,重新定义「可靠」目标用户
- C语言零基础入门:嵌入式系统开发之旅
岱宗夫up
C语言开发语言c语言学习
C语言零基础入门:嵌入式系统开发之旅一、引言嵌入式系统开发是当今科技领域中一个极具魅力和挑战性的方向。从智能家居设备到汽车电子系统,从智能穿戴设备到工业自动化控制,嵌入式系统无处不在。而C语言,作为嵌入式开发中最常用的语言之一,以其高效、灵活和接近硬件的特点,成为了嵌入式开发者的首选工具。如果你对嵌入式系统开发充满兴趣,但又对C语言一窍不通,那么这篇文章将是你开启这段奇妙旅程的完美起点。二、C语言
- 电子电气架构 --- 汽车行业技术变革
车载诊断技术
汽车行业架构网络协议数据库汽车gateway
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师:简单,单纯,喜欢独处,独来独往,不易合同频过着接地气的生活,除了生存温饱问题之外,没有什么过多的欲望,表面看起来很高冷,内心热情,如果你身边有这样灵性的人,一定要好好珍惜他们眼中有神有光,干净,给人感觉很舒服,有超强的感知能力有形的无形的感知力很强,能感知人的内心变化喜欢独处,好静,
- 抗辐照CANFD芯片工艺解析:如何保障芯片的可靠性
国科安芯
科普嵌入式硬件安全威胁分析安全性测试
地面车规芯片容易受到大气中期效应的影响进而发生单粒子效应进而引起软错误,在航天领域这一问题又进一步细化为单粒子闩锁、单粒子翻转等问题。2024年,国内车厂也开始关注车规芯片的抗软错误问题,并做了一系列的实验。CANFD接口芯片作为在汽车电子学应用最多的芯片,在软错误防护上的考虑较为迫切。另一方面,在商业航天领域,为了降本增效,在通信接口的选择上越来越倾向于CANFD芯片。CANFD接口芯片不仅继承
- 电子电气架构 ---常见车规MCU安全启动方案
车载诊断技术
EV(电动汽车)常规知识必备车载电子与软件框架车载电子电气架构架构单片机安全人工智能AI在整车产品领域的应用
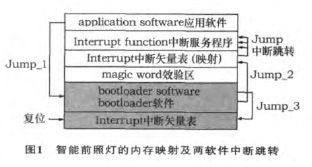
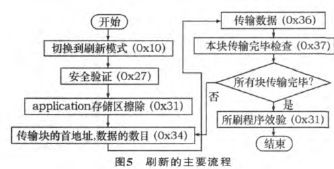
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师:简单,单纯,喜欢独处,独来独往,不易合同频过着接地气的生活,除了生存温饱问题之外,没有什么过多的欲望,表面看起来很高冷,内心热情,如果你身边有这样灵性的人,一定要好好珍惜他们眼中有神有光,干净,给人感觉很舒服,有超强的感知能力有形的无形的感知力很强,能感知人的内心变化喜欢独处,好静,
- AUTOSAR汽车电子嵌入式编程精讲300篇-CAN总线协议在车载模块中的应用与实现
格图素书
汽车
目录知识储备面向车载开发的CAN通信协议1基本概念2优势3概念和特征4技术介绍5应用举例6测试工具编辑7错误处理编辑前言国内外研究现状总线与CAN总线技术CAN总线技术在电子汽车领域的研究现状OBD系统的发展和研究现状OBD车载模块的研究现状2OBD数据获取原理分析2.1车载CAN网络与OBD系统的连接和诊断2.1.1OBD接口2.1.2车载CAN总线网络与CAN报文2.1.3SAEJ1979协议
- STM实战开发(6):STM32 驱动 LCD 屏幕显示字符开发详解
嵌入式开发项目
STM32实战开发2025年嵌入式开发stm32嵌入式硬件单片机物联网
在嵌入式系统中,LCD显示是一个非常常见的需求。STM32作为一个强大的微控制器平台,提供了丰富的外设接口,可以方便地驱动各种类型的LCD屏幕。本文将详细介绍如何使用STM32开发环境,驱动LCD屏幕来显示字符,涵盖从硬件连接到软件控制的所有关键步骤。一、引言液晶显示屏(LCD)广泛应用于各种嵌入式系统中,尤其是在智能设备、家电、汽车电子等领域。STM32作为主流的微控制器之一,拥有强大的计算能力
- python能否控制plc_小说python操作PLC
狮子坤
python能否控制plc
PLC(ProgrammableLogicController)可编程逻辑控制器,可以理解为一个微型计算机,广泛应用于工业控制中,如楼宇智控、精密机床、汽车电子等等。随着物联网的兴起,越来越多的传统工业设备需要和外界通信,但很多情况下,类似PLC这种微控制器,由于自身硬件的因素,无法直接与外界互联互通,通过PC这种上位机作为一个中介桥梁,为PLC与外界沟通打开了一扇门。Python作为当前最火的语
- STM32中CAN通信详解与示例代码
ArqLoop
stm32单片机嵌入式硬件信息与通信
CAN通信是一种常用的总线通信协议,广泛应用于工业控制、汽车电子等领域。在本文中,我们将详细介绍如何在STM32微控制器上实现CAN通信,并提供相应的示例代码。硬件准备在开始之前,我们需要准备以下硬件:STM32微控制器开发板(例如STM32F4Discovery)CAN收发器(例如MCP2551)CAN总线连接线引脚配置首先,我们需要配置STM32的引脚来支持CAN功能。根据具体的型号和开发板,
- INCA二次开发GUI实例化
智海行舟
python个人开发
【摘要】本文基于ETASINCA二次开发实践,深入探讨如何构建完整的自动化测试GUI系统。通过Python语言结合COM接口技术,实现从软件架构设计到功能模块开发的完整闭环,为汽车电子领域工程师提供可复用的开发范式。一、INCA二次开发技术背景1.1行业应用需求在汽车电子开发领域,ETASINCA作为行业标准标定工具,其自动化测试需求日益增长。传统的手动操作模式存在以下痛点:重复性操作耗时严重(单
- 全星FMEA软件:高效管理与卓越体验的完美融合
全星007
汽车制造芯片软件工程
全星FMEA软件:高效管理体验在当今复杂多变的汽车电子行业,FMEA(失效模式与影响分析)作为保障产品可靠性的关键工具,其管理的高效性与准确性至关重要。全星FMEA软件系统凭借其卓越的性能与贴心的设计,成为企业不可或缺的得力助手,深受行业广泛认可与推荐。全星FMEA软件系统为项目管理提供了强大的支持,能够将FMEA资料集中管理,形成一个清晰、有序的资料库。无论是团队协作还是个人工作,企业都能随时查
- 全星《研发管理 APQP 软件系统》:汽车电子行业的卓越之选
全星007
汽车
《全星研发管理APQP软件系统》:汽车电子行业的卓越之选汽车电子行业的研发管理,正面临着前所未有的挑战与机遇。全星研发管理APQP软件系统应运而生,为行业研发管理体系建设化解难题。研发管理软件系统APQP软件系统--强力赋能汽车部件开发管理《全星研发管理APQP软件系统》在通用传统项目管理系统功能的基础上,深度契合汽车质量管理IATF16949和VDA体系。APQP、FMEA、PPAP、SPC、M
- 智能汽车嘚啵嘚 --- 智能座舱第六稿:智能座舱的车载显示
车载诊断技术
智能座舱汽车架构人工智能网络安全智能座舱
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师:所谓鸡汤,要么蛊惑你认命,要么怂恿你拼命,但都是回避问题的根源,以现象替代逻辑,以情绪代替思考,把消极接受现实的懦弱,伪装成乐观面对不幸的豁达,往不幸上面喷“香水”来掩盖问题。无人问津也好,技不如人也罢,你都要试着安静下来,去做自己该做的事.而不是让内心的烦躁、焦虑、毁掉你本就不多的
- 汽车电子软件开发需知
嵌入式知行
车载通信汽车嵌入式硬件单片机c++
目录一、嵌入式1.1什么是嵌入式系统1.2什么是汽车ECU1.3如何了解一款MCU1.4谈谈代码静态分析二、汽车软件2.1什么是“域控制器”2.2为什么是ARXML2.3SOA:面向服务的架构2.4下一代的EEA(电子电气架构)2.5ADAS的八大系统(汽车高级辅助驾驶系统)三、流程类3.1什么是软件定义汽车3.2汽车软件开发V模型3.3谈谈ASPICE3.4ISO262623.5功能安全一、嵌入
- 消费级、工业级、汽车级、军工级、航天级芯片区别对比
LVXIANGAN
汽车
汽车电子行业,经常会由于降本原因,听到“消规、工规、车规”方面的讨论。常见的芯片等级一般是按照使用温度、辐射、抗干扰等来分级。等级分为以下5类:民用级(消费级)、工业级、汽车级(车规级)、军工级、航天级。民用级(消规、消费级)温度为:0C~+70°C,市面上常见的、经常交易的那种,电脑、手机、数码产品等能看到的基本上都是消费级的,价格便宜、更新换代快、最常见最实用。工业级(工规)温度为:-40°C
- 电子电气架构 --- 拓扑架构集中的趋势及其演变
车载诊断技术
EV(电动汽车)常规知识必备车载电子与软件框架架构网络协议数据库汽车gateway拓扑架构集中的趋势及其演变
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师:简单,单纯,喜欢独处,独来独往,不易合同频过着接地气的生活,除了生存温饱问题之外,没有什么过多的欲望,表面看起来很高冷,内心热情,如果你身边有这样灵性的人,一定要好好珍惜他们眼中有神有光,干净,给人感觉很舒服,有超强的感知能力有形的无形的感知力很强,能感知人的内心变化喜欢独处,好静,
- 智能汽车嘚啵嘚 --- 智能座舱第一稿
车载诊断技术
智能座舱汽车架构网络安全电子电器架构智能座舱
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师:所有人的看法和评价都是暂时的,只有自己的经历是伴随一生的,几乎所有的担忧和畏惧,都是来源于自己的想象,只有你真的去做了,才会发现有多快乐。人就应该满脑子都是前途,不再在意别人的看法不再害怕别人讨厌自己,不再畏手畏脚忧心忡忡也不会在睡前反回忆白天的行为,是否让对方产生误解用你那精神内耗
- Maven
Array_06
eclipsejdkmaven
Maven
Maven是基于项目对象模型(POM), 信息来管理项目的构建,报告和文档的软件项目管理工具。
Maven 除了以程序构建能力为特色之外,还提供高级项目管理工具。由于 Maven 的缺省构建规则有较高的可重用性,所以常常用两三行 Maven 构建脚本就可以构建简单的项目。由于 Maven 的面向项目的方法,许多 Apache Jakarta 项目发文时使用 Maven,而且公司
- ibatis的queyrForList和queryForMap区别
bijian1013
javaibatis
一.说明
iBatis的返回值参数类型也有种:resultMap与resultClass,这两种类型的选择可以用两句话说明之:
1.当结果集列名和类的属性名完全相对应的时候,则可直接用resultClass直接指定查询结果类
- LeetCode[位运算] - #191 计算汉明权重
Cwind
java位运算LeetCodeAlgorithm题解
原题链接:#191 Number of 1 Bits
要求:
写一个函数,以一个无符号整数为参数,返回其汉明权重。例如,‘11’的二进制表示为'00000000000000000000000000001011', 故函数应当返回3。
汉明权重:指一个字符串中非零字符的个数;对于二进制串,即其中‘1’的个数。
难度:简单
分析:
将十进制参数转换为二进制,然后计算其中1的个数即可。
“
- 浅谈java类与对象
15700786134
java
java是一门面向对象的编程语言,类与对象是其最基本的概念。所谓对象,就是一个个具体的物体,一个人,一台电脑,都是对象。而类,就是对象的一种抽象,是多个对象具有的共性的一种集合,其中包含了属性与方法,就是属于该类的对象所具有的共性。当一个类创建了对象,这个对象就拥有了该类全部的属性,方法。相比于结构化的编程思路,面向对象更适用于人的思维
- linux下双网卡同一个IP
被触发
linux
转自:
http://q2482696735.blog.163.com/blog/static/250606077201569029441/
由于需要一台机器有两个网卡,开始时设置在同一个网段的IP,发现数据总是从一个网卡发出,而另一个网卡上没有数据流动。网上找了下,发现相同的问题不少:
一、
关于双网卡设置同一网段IP然后连接交换机的时候出现的奇怪现象。当时没有怎么思考、以为是生成树
- 安卓按主页键隐藏程序之后无法再次打开
肆无忌惮_
安卓
遇到一个奇怪的问题,当SplashActivity跳转到MainActivity之后,按主页键,再去打开程序,程序没法再打开(闪一下),结束任务再开也是这样,只能卸载了再重装。而且每次在Log里都打印了这句话"进入主程序"。后来发现是必须跳转之后再finish掉SplashActivity
本来代码:
// 销毁这个Activity
fin
- 通过cookie保存并读取用户登录信息实例
知了ing
JavaScripthtml
通过cookie的getCookies()方法可获取所有cookie对象的集合;通过getName()方法可以获取指定的名称的cookie;通过getValue()方法获取到cookie对象的值。另外,将一个cookie对象发送到客户端,使用response对象的addCookie()方法。
下面通过cookie保存并读取用户登录信息的例子加深一下理解。
(1)创建index.jsp文件。在改
- JAVA 对象池
矮蛋蛋
javaObjectPool
原文地址:
http://www.blogjava.net/baoyaer/articles/218460.html
Jakarta对象池
☆为什么使用对象池
恰当地使用对象池化技术,可以有效地减少对象生成和初始化时的消耗,提高系统的运行效率。Jakarta Commons Pool组件提供了一整套用于实现对象池化
- ArrayList根据条件+for循环批量删除的方法
alleni123
java
场景如下:
ArrayList<Obj> list
Obj-> createTime, sid.
现在要根据obj的createTime来进行定期清理。(释放内存)
-------------------------
首先想到的方法就是
for(Obj o:list){
if(o.createTime-currentT>xxx){
- 阿里巴巴“耕地宝”大战各种宝
百合不是茶
平台战略
“耕地保”平台是阿里巴巴和安徽农民共同推出的一个 “首个互联网定制私人农场”,“耕地宝”由阿里巴巴投入一亿 ,主要是用来进行农业方面,将农民手中的散地集中起来 不仅加大农民集体在土地上面的话语权,还增加了土地的流通与 利用率,提高了土地的产量,有利于大规模的产业化的高科技农业的 发展,阿里在农业上的探索将会引起新一轮的产业调整,但是集体化之后农民的个体的话语权 将更少,国家应出台相应的法律法规保护
- Spring注入有继承关系的类(1)
bijian1013
javaspring
一个类一个类的注入
1.AClass类
package com.bijian.spring.test2;
public class AClass {
String a;
String b;
public String getA() {
return a;
}
public void setA(Strin
- 30岁转型期你能否成为成功人士
bijian1013
成功
很多人由于年轻时走了弯路,到了30岁一事无成,这样的例子大有人在。但同样也有一些人,整个职业生涯都发展得很优秀,到了30岁已经成为职场的精英阶层。由于做猎头的原因,我们接触很多30岁左右的经理人,发现他们在职业发展道路上往往有很多致命的问题。在30岁之前,他们的职业生涯表现很优秀,但从30岁到40岁这一段,很多人
- [Velocity三]基于Servlet+Velocity的web应用
bit1129
velocity
什么是VelocityViewServlet
使用org.apache.velocity.tools.view.VelocityViewServlet可以将Velocity集成到基于Servlet的web应用中,以Servlet+Velocity的方式实现web应用
Servlet + Velocity的一般步骤
1.自定义Servlet,实现VelocityViewServl
- 【Kafka十二】关于Kafka是一个Commit Log Service
bit1129
service
Kafka is a distributed, partitioned, replicated commit log service.这里的commit log如何理解?
A message is considered "committed" when all in sync replicas for that partition have applied i
- NGINX + LUA实现复杂的控制
ronin47
lua nginx 控制
安装lua_nginx_module 模块
lua_nginx_module 可以一步步的安装,也可以直接用淘宝的OpenResty
Centos和debian的安装就简单了。。
这里说下freebsd的安装:
fetch http://www.lua.org/ftp/lua-5.1.4.tar.gz
tar zxvf lua-5.1.4.tar.gz
cd lua-5.1.4
ma
- java-14.输入一个已经按升序排序过的数组和一个数字, 在数组中查找两个数,使得它们的和正好是输入的那个数字
bylijinnan
java
public class TwoElementEqualSum {
/**
* 第 14 题:
题目:输入一个已经按升序排序过的数组和一个数字,
在数组中查找两个数,使得它们的和正好是输入的那个数字。
要求时间复杂度是 O(n) 。如果有多对数字的和等于输入的数字,输出任意一对即可。
例如输入数组 1 、 2 、 4 、 7 、 11 、 15 和数字 15 。由于
- Netty源码学习-HttpChunkAggregator-HttpRequestEncoder-HttpResponseDecoder
bylijinnan
javanetty
今天看Netty如何实现一个Http Server
org.jboss.netty.example.http.file.HttpStaticFileServerPipelineFactory:
pipeline.addLast("decoder", new HttpRequestDecoder());
pipeline.addLast(&quo
- java敏感词过虑-基于多叉树原理
cngolon
违禁词过虑替换违禁词敏感词过虑多叉树
基于多叉树的敏感词、关键词过滤的工具包,用于java中的敏感词过滤
1、工具包自带敏感词词库,第一次调用时读入词库,故第一次调用时间可能较长,在类加载后普通pc机上html过滤5000字在80毫秒左右,纯文本35毫秒左右。
2、如需自定义词库,将jar包考入WEB-INF工程的lib目录,在WEB-INF/classes目录下建一个
utf-8的words.dict文本文件,
- 多线程知识
cuishikuan
多线程
T1,T2,T3三个线程工作顺序,按照T1,T2,T3依次进行
public class T1 implements Runnable{
@Override
- spring整合activemq
dalan_123
java spring jms
整合spring和activemq需要搞清楚如下的东东1、ConnectionFactory分: a、spring管理连接到activemq服务器的管理ConnectionFactory也即是所谓产生到jms服务器的链接 b、真正产生到JMS服务器链接的ConnectionFactory还得
- MySQL时间字段究竟使用INT还是DateTime?
dcj3sjt126com
mysql
环境:Windows XPPHP Version 5.2.9MySQL Server 5.1
第一步、创建一个表date_test(非定长、int时间)
CREATE TABLE `test`.`date_test` (`id` INT NOT NULL AUTO_INCREMENT ,`start_time` INT NOT NULL ,`some_content`
- Parcel: unable to marshal value
dcj3sjt126com
marshal
在两个activity直接传递List<xxInfo>时,出现Parcel: unable to marshal value异常。 在MainActivity页面(MainActivity页面向NextActivity页面传递一个List<xxInfo>): Intent intent = new Intent(this, Next
- linux进程的查看上(ps)
eksliang
linux pslinux ps -llinux ps aux
ps:将某个时间点的进程运行情况选取下来
转载请出自出处:http://eksliang.iteye.com/admin/blogs/2119469
http://eksliang.iteye.com
ps 这个命令的man page 不是很好查阅,因为很多不同的Unix都使用这儿ps来查阅进程的状态,为了要符合不同版本的需求,所以这个
- 为什么第三方应用能早于System的app启动
gqdy365
System
Android应用的启动顺序网上有一大堆资料可以查阅了,这里就不细述了,这里不阐述ROM启动还有bootloader,软件启动的大致流程应该是启动kernel -> 运行servicemanager 把一些native的服务用命令启动起来(包括wifi, power, rild, surfaceflinger, mediaserver等等)-> 启动Dalivk中的第一个进程Zygot
- App Framework发送JSONP请求(3)
hw1287789687
jsonp跨域请求发送jsonpajax请求越狱请求
App Framework 中如何发送JSONP请求呢?
使用jsonp,详情请参考:http://json-p.org/
如何发送Ajax请求呢?
(1)登录
/***
* 会员登录
* @param username
* @param password
*/
var user_login=function(username,password){
// aler
- 发福利,整理了一份关于“资源汇总”的汇总
justjavac
资源
觉得有用的话,可以去github关注:https://github.com/justjavac/awesome-awesomeness-zh_CN 通用
free-programming-books-zh_CN 免费的计算机编程类中文书籍
精彩博客集合 hacke2/hacke2.github.io#2
ResumeSample 程序员简历
- 用 Java 技术创建 RESTful Web 服务
macroli
java编程WebREST
转载:http://www.ibm.com/developerworks/cn/web/wa-jaxrs/
JAX-RS (JSR-311) 【 Java API for RESTful Web Services 】是一种 Java™ API,可使 Java Restful 服务的开发变得迅速而轻松。这个 API 提供了一种基于注释的模型来描述分布式资源。注释被用来提供资源的位
- CentOS6.5-x86_64位下oracle11g的安装详细步骤及注意事项
超声波
oraclelinux
前言:
这两天项目要上线了,由我负责往服务器部署整个项目,因此首先要往服务器安装oracle,服务器本身是CentOS6.5的64位系统,安装的数据库版本是11g,在整个的安装过程中碰到很多的坑,不过最后还是通过各种途径解决并成功装上了。转别写篇博客来记录完整的安装过程以及在整个过程中的注意事项。希望对以后那些刚刚接触的菜鸟们能起到一定的帮助作用。
安装过程中可能遇到的问题(注
- HttpClient 4.3 设置keeplive 和 timeout 的方法
supben
httpclient
ConnectionKeepAliveStrategy kaStrategy = new DefaultConnectionKeepAliveStrategy() {
@Override
public long getKeepAliveDuration(HttpResponse response, HttpContext context) {
long keepAlive
- Spring 4.2新特性-@Import注解的升级
wiselyman
spring 4
3.1 @Import
@Import注解在4.2之前只支持导入配置类
在4.2,@Import注解支持导入普通的java类,并将其声明成一个bean
3.2 示例
演示java类
package com.wisely.spring4_2.imp;
public class DemoService {
public void doSomethin