robotc 编程挑战 (5)
- 任务简介
- 程序
任务简介
本文为 virtual world challenge pack 中的基本运动(BASIC MOVEMENT)
中的 “cargo_transport_challenge”, 要求从指定区域出发,
将抓取的物体运送指定终点 (图 1 中远方的黑线) 之后, 如图 1 所示.
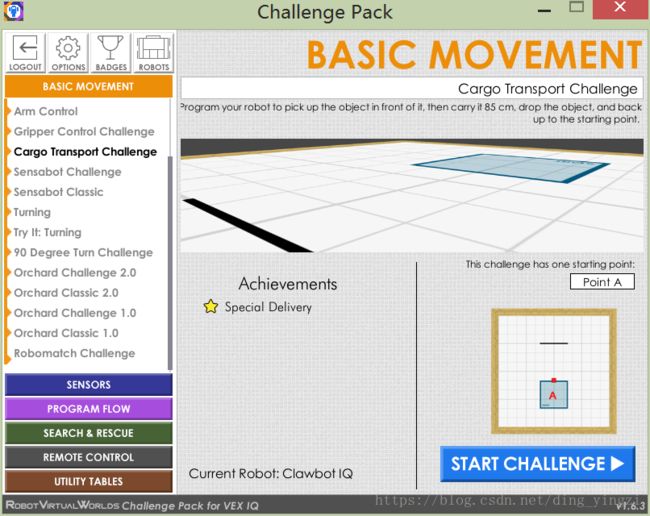
图 1 gcargo_transport_challeng 界面图
此挑战使用的 robot 为 “Clawbot IQ”, 基本配置如图 2 所示.
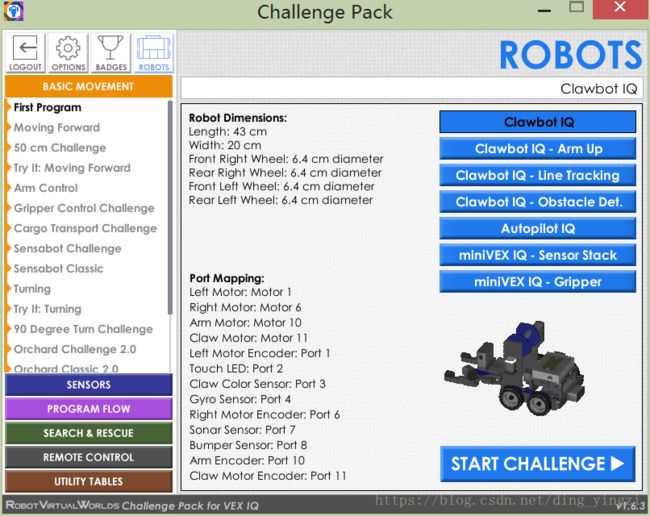
图 2 robot 基本配置
程序
#pragma config(StandardModel, "Clawbot IQ")
//*!!Code automatically generated by 'ROBOTC' configuration wizard !!*//
task main()
{
float dist = 85;
float d = 6.4;
float circle = PI * d;
float rotation_count = (dist + circle / 4) / circle;
// grip
setMotorTarget(clawMotor, 3, 100);
waitUntilMotorStop(clawMotor);
// arm up
setMotorTarget(armMotor, 300, 100);
waitUntilMotorStop(armMotor);
// go
forward(rotation_count);
// ungrip
setMotorTarget(clawMotor, -3, -100);
waitUntilMotorStop(clawMotor);
// arm up
setMotorTarget(armMotor, 300, 100);
waitUntilMotorStop(armMotor);
// back
backward(rotation_count);
}运行结果如图 3 所示.
图 3 运行结果