介绍
曾在‘CNN推理优化系列之一: Filter pruning’中讲过filter pruning在CNN inference时的优化。此篇同样也是致力于减少layer计算的channels数量,但其思路又与上篇文章不同。
单独考虑一个conv层的计算,即可以想着将它weight tensor里面的某些权重较轻的(L1-norm值较小)filters去掉以节省计算,也可以考虑减少输入feature maps中的若干channels信息,
然后通过调整weights使整体output feature map的信息不会丢失太多。本篇即是后一种思路。
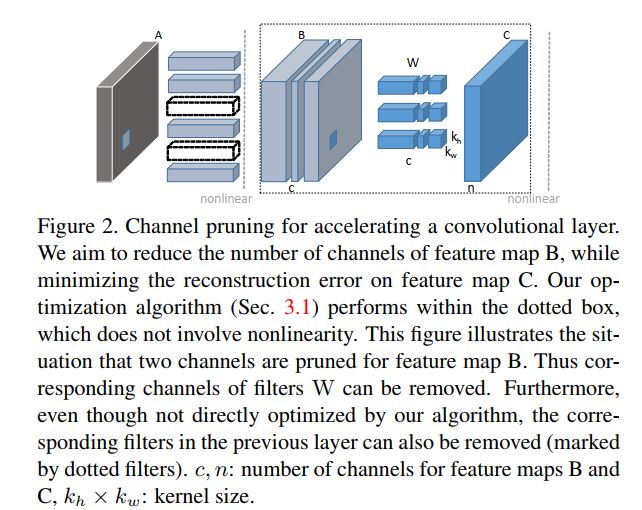
Channel pruning方法
假设我们想试着减少某一单独conv层的计算。已知它的如下信息:
- Input feature map X的shape: N x c x IH X IW,其中N 为batch size,c为输入feature map数目,IH与IW分别为输入feature map的长与宽;
- convolutional filters W的shape: n x c x Kh x Kw,其中n与c分别为此conv层输入、输出feature map channels数目,Kh与Kw则为conv kernel的长与宽;
- Output feature map Y的shape: N X n x OH X OW,其中N为batch size,n为输入feature map数目,OH与OW分别为输出feature map的长与宽。
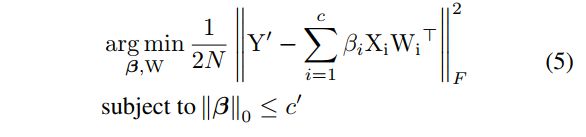
本文中,我们要解决的问题是如何在减少X某些channel信息的同时,保证Y的整体信息仍然不会损失太多。以下公式可表示此一优化问题。
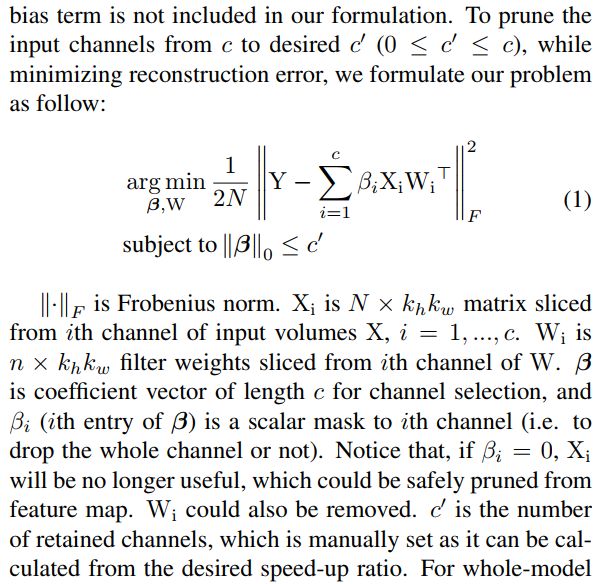
在此一l0优化问题中,我们共有两个矢量参数需要求解,其一为β,它决定了我们从c个输入channels中选择啥些input channels,进而舍弃哪些。若βi = 0,则第i
个channel将被舍弃,反之若β=1,则第i个input channel feature map信息将被保留。另外一个需要考虑的参数则是W(Conv weights),显然那些被舍掉的weight信息,我们
不需要再保留了,但不仅于此,我们还要考虑调整W的值使得选择后的减少的input feature map组合经过conv filter处理后依然得到与之前输出Y近似的信息即Y'。
Channel pruning方法的分步骤施行
原始优化问题的放松变形
上述讨论过的l0优化问题本质上是个NP-hard问题。我们给其多些约束,进而将它变为如下所示的l1 norm优化问题。
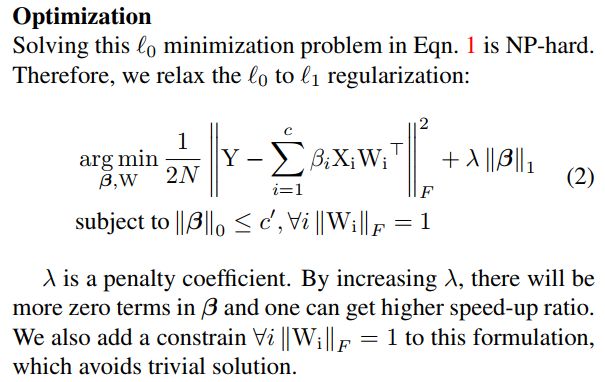
首先增加了参数β的normalization factor,从而让它向着我们关心的方向寻找合适的参数集合(即让β有尽量多的0,从而pruning掉一定的input channels信息)。
另外则增加了W的范数为1的强约束以让我们得到的W解不过于简单(这一点不太理解)。
进而我们再将它变为两个分步骤的子优化问题,分别由以下两小节内容来概述。
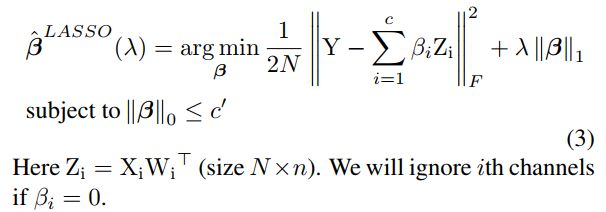
求参数β的子优化问题
首先,我们可固定W不变,寻求参数β的组合,即决定输入feature map的哪些input channels可以舍弃。这显然是个NP-hard的组合优化问题,作者使用了经典的启发式LASSO方式来
迭代寻找最优的β值,如下公式所示。
求参数W的子优化问题
然后我们再固定上面得到的β不变,再求解最优的W参数值,本质上就是求解如下的MSE问题。
整体求解方案
上面三小节中讲了使用channel pruning方法的理论方法。在实际操作时有如下两种可循的途径。
其一:交替着优化问题一与二,即最开始的时候用trained model weights来初始化W值,并设λ为0,即不设任何normalization penality factor,而||β||则为c,即保留所有的
input channels信息;然后随着迭代进行,逐渐增加λ的值;而每改变一次λ值,我们将会一直交替优化求解β与W,直至最终||β||稳定下来。等到最终||β||的值满足小
于或等于c'的要求时,就停下来,然后就得到最终的W值为{βiWi}。
其二:分别进行两个优化问题。即先持续优化得到β值,使其满足||β|| <= c',然后再固定β,优化一次得到W值。
作者观察表明此两种方法的效果近似,而第二种计算量显然更小,更合乎实际,因此最终为本文大多实验所采用。
整个model的pruning
以上所介绍的方法为单个conv层pruning所使用的方法。而在将此方法应用于整个CNN model时,方法也类似,只需要sequentially将此它应用于每个层即可(当然某些特殊的多分支层需要稍稍特殊对待)。
以下为用于整个model时每个层所应用的优化pruning。
与公式一相比,它使用Y'替换掉了Y,这里Y'指的是原始model上的输出feature map,因此我们会在整个model weigth参数调整时考虑accumulated error的影响。
Multi-branch networks pruning
同之前讲过的filter pruning一样,channel pruning同样要考虑像Residual module那样multi-branch的情况。
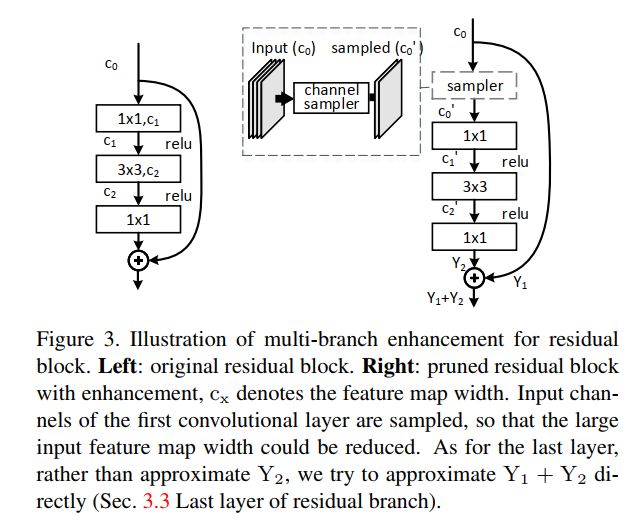
这里考虑一个典型的Resudal module的channel pruning的方法。显然中间的3x3 conv可以像正常的single branch conv上介绍的方法进行优化。
而第一个1x1 conv (bottleneck)以及第二个1x1 conv(expanding module),则需要另外考虑。
Last layer的pruning
对于最后一个1x1 conv的pruning,我们不仅要考虑residual分支上的信息恢复,同样要考虑到identity maping分支上面的信息丢失。因此最终用于恢复的目标值并非是Y2,而是Y1 - Y'1 + Y2。
这样就可以在W的计算中考虑进去identity maping上信息的恢复了。
first layer的pruning
同样对于第一个1x1 conv,我们对input feature maps也不能妄加pruning,毕竟它是与identity maping分支共享input feature maps的。为了不对identity maping分支有影响,在这里加入了一个sampler op用于
从输入的feature maps上进行特征提取,这样就能将第一个1x1 conv变成一个正常的conv层了。
实验结果
以下为channel pruning方法在单个层pruning上与我们之前讲过的filter pruning方法的比较。看得出它的结果是要好上一些。毕竟在此方法里,我们真正会pruning掉的是那些inter-input-feature maps之间的冗余信息。

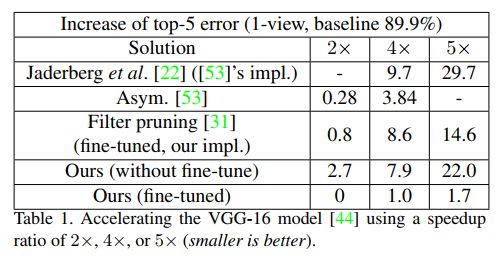
以下为在获得相同加速比的时候,channel pruning方法与其它inference加速方法在VGG loss上的损失比较。
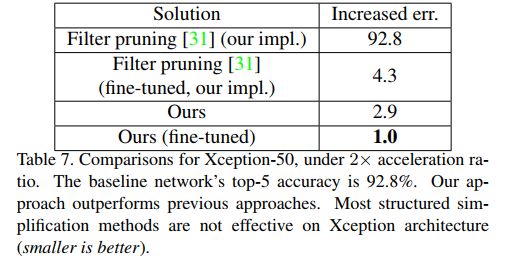
以下为在Xception上面的结果比较。
参考文献
- Channel Pruning for Accelerating Very Deep Neural Networks, Yihui-He, 2017