CSM阴影技术讲解
笔者介绍:姜雪伟,IT公司技术合伙人,IT高级讲师,CSDN社区专家,特邀编辑,畅销书作者,已出版书籍:《手把手教你架构3D游戏引擎》电子工业出版社和《Unity3D实战核心技术详解》电子工业出版社,《Cocos2d-x 3.x图形学渲染技术讲解》电子工业出版社等。
CSDN视频网址:http://edu.csdn.net/lecturer/144
该篇博客主要是给读者介绍关于CSM实时阴影技术实现,文中涉及到的源代码可以在DirectX Software Development Kit (SDK) in the CascadedShadowMaps11 and VarianceShadows11 samples找到,感兴趣的读者可以自行下载。
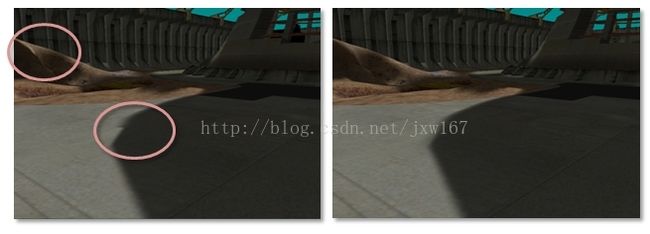
CSM的基本概念很容易理解, 相机平截头体的不同区域需要具有不同分辨率的阴影贴图,距离眼睛最近的物体比较远的物体需要更高
的分辨率。 事实上,当眼睛移动非常接近几何时,最接近眼睛的像素可能需要如此大的分辨率,甚至4096×4096的阴影贴图也不够。
CSM的基本思想是将截头锥体分割成多个截头圆锥体。 为每个子树呈现阴影贴图; 像素着色器然后从最接近匹配所需分辨率的地图采样,
如下图所示:

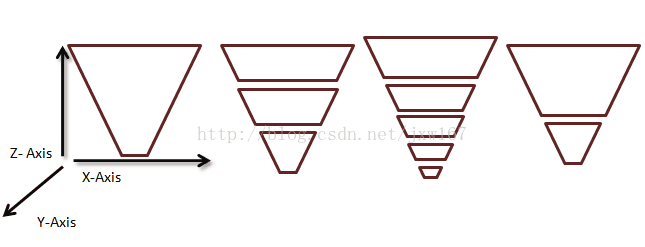
在图1中,品质显示(从左到右)从最高到最低, 表示阴影图的一系列网格,具有截头锥体(反向锥体为红色),显示了
像素覆盖率如何受到不同分辨率阴影贴图的影响。 阴影是质量最高的(白色像素),当比例为1:1的比例时,将光线中的像素映
射到阴影贴图中的纹素。 当多个像素映射到相同的阴影纹素时,透视混叠以大的、块状的纹理贴图(左图)的形式发生。
阴影贴图太大时,将被采样。 如下图所示:

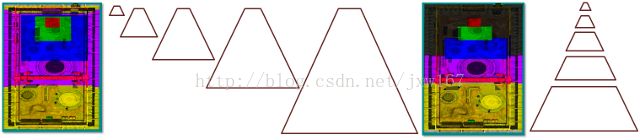
图2显示了图1中每个阴影贴图中最高质量部分的切口。具有最紧密放置的像素(在顶点处)的阴影贴图最接近摄像机。
在技术上,这些是相同大小的地图,白色和灰色用于举例说明级联阴影贴图的成功, 白色是理想的,因为它显示了良好的覆
盖率 - 视空间像素和阴影贴图纹素的1:1比例。
CSM需要每帧执行以下步骤:
1、将截锥体分成子块。
2、计算每个子视锥体的正投影。
3、为每个子视锥体渲染一个阴影贴图。
4、渲染场景
a 绑定阴影贴图和渲染。
b顶点着色器执行以下操作:
计算每个灯光的纹理坐标(除非在像素着色器中计算所需的纹理坐标)。
转换灯光顶点,依此类推。
c像素着色器执行以下操作:
确定正确的阴影贴图。
必要时转换纹理坐标。
处理灯光
下面介绍如何分割视锥体,分割截锥体是创建子视锥体的行为, 用于分割平截头体的一种技术是计算Z方向从零百分之一百的间隔。
每个间隔然后表示作为Z轴的百分比的近平面和远平面。
在实际操作中,重新计算每帧的平截头体分裂会导致阴影边缘闪烁。 普遍接受的做法是使用每个场景的静态级联间隔集。 在这种情况下,沿Z轴的间隔用于描述在分割截头锥体时发生的子结点, 确定给定场景的正确大小间隔取决于几个因素。
相对于场景几何,相机方向影响级联间隔选择。 例如,非常靠近地面的相机,例如足球游戏中的地面摄像机,具有与天空中的照相机不同的静态级联间隔。
图4,显示一些不同的摄像机及其各自的分区。 当场景的Z范围非常大时,需要更多的分割平面。 例如,当眼睛非常靠近地平面,但是遥远的物体仍然可见时,可能需要多个级联。 分割平截头体,使得眼睛附近更多的分裂(透视混叠正在改变最快)也是有价值的。 当大多数几何结构被集成到视锥体的小部分(例如俯视图或飞行模拟器)中时,需要更少的级联。
效果如下所示:

左边,当几何在Z中具有高动态范围时,需要大量的级联。 (中心)当几何在Z中具有低动态范围时,多个平截头体几乎没有任何好处。
(右)当动态范围为中等时,只需要三个分区。
每个级联的投影矩阵紧密地配合在其相应的圆锥上, 在视场摄像机和光方向正交的配置中,级联可以紧密配合,几乎没有重叠。 光和
摄像机移动成平行对准时,重叠变大(图5)。 当光和摄像机几乎平行时,它被称为“断层”,对于大多数阴影算法来说,这是一个很难的
场景。 限制光和相机是不常见的,以便不会发生这种情况。 然而,CSM在这种情况下表现比许多其他算法好得多。

许多CSM实现使用固定大小的截头圆锥体, 当平截头体以固定大小的间隔分割时,像素着色器可以使用Z深度索引到级联阵列。
一旦选择了截头锥体间隔,就可以使用以下两种方法之一创建子视锥体:适合场景并适合级联。
所有的截头圆锥体都可以用相同的近平面创建。 这迫使级联重叠。 CascadedShadowMaps11示例调用此技术适合场景。
或者,可以使用实际的分区间隔作为近平面和远平面来创建截头圆锥体, CascadedShadowMaps11示例调用此技术适合级联。
这两种方法如图所示,适合级联浪费较少的分辨率。 适合级联的问题是正投影基于视锥体的方向而生长和收缩。 适合场景技术
通过视角平截头体的最大尺寸来消除正视投影,从而消除视角相机移动时出现的伪影。 改进阴影深度的常见技巧地图解决了在“以纹理
大小增量移动光”部分中的光线移动时出现的伪影。
CascadedShadowMaps11示例将阴影贴图呈现为一个大的缓冲区。 这是因为PCF上的纹理数组是一个Direct3D 10.1功能。 对于
每个级联,创建一个视口,其涵盖对应于该级联的深度缓冲区的部分。 零像素着色器被绑定,因为只需要深度。 最后,为每个级联设置
正确的视口和阴影矩阵,因为深度图一次一个地渲染到主影子缓冲区中。
包含阴影的缓冲区现在绑定到像素着色器。 有两种选择CascadedShadowMaps11示例中实现的级联的方法。 这两种方法用着色器代码解释。
顶点着色器计算顶点的世界空间中的位置。
Output.vDepth = mul( Input.vPosition, m_mWorldView ).z;像素着色器接受的插值深度:
fCurrentPixelDepth = Input.vDepth;CASCADE_COUNT_FLAG指定级联数。 m_fCascadeFrustumsEyeSpaceDepths_data约束视图截头锥分区。 比较后,
fComparison包含当前像素大于屏障的值1,当级联较小时为0。 点积将这些值合并到数组索引中。
float4 vCurrentPixelDepth = Input.vDepth;
float4 fComparison = ( vCurrentPixelDepth > m_fCascadeFrustumsEyeSpaceDepths_data[0]);
float fIndex = dot(
float4( CASCADE_COUNT_FLAG > 0,
CASCADE_COUNT_FLAG > 1,
CASCADE_COUNT_FLAG > 2,
CASCADE_COUNT_FLAG > 3)
, fComparison );
fIndex = min( fIndex, CASCADE_COUNT_FLAG );
iCurrentCascadeIndex = (int)fIndex;
一旦级联被选中,纹理坐标必须被转换成正确的级联。
vShadowTexCoord = mul( InterpolatedPosition, m_mShadow[iCascadeIndex] );然后使用该纹理坐标用X坐标和Y坐标对纹理进行采样。 Z坐标用于进行最终的深度比较。
基于地图的选择针对级联进行测试,以找到涵盖特定像素的最紧密的地图。 顶点着色器不是计算世界空间中的位置,而是计算每个级联的视图空间位置。 像素着色器遍历级联,以便缩放和移动纹理坐标,以便它们对当前级联进行索引。 然后根据纹理边界测试纹理坐标。 当纹理坐标的X和Y值落在级联中时,它们用于对纹理进行采样。 Z坐标用于进行最终的深度比较。
基于间隔的选择比基于地图的选择要快一些,因为级联选择可以直接完成。 基于地图的选择必须与纹理坐标与级联边界相交。
当阴影贴图完美对齐时,基于地图的选择会更有效地使用级联。
VSM(后面博客讲解)和过滤技术(如PCF)可以与低分辨率CSM一起使用来产生柔和的阴影。 不幸的是,由于分辨率不匹
配,这会在层叠层之间产生可见的接缝。 解决方案是在阴影映射之间创建一个带,其中对两个级联执行阴影测试。 然后,
着色器基于混合频带中的像素位置在两个值之间线性内插。 样本CascadedShadowMaps11和VarianceShadows11提供了一个GUI滑块,
可用于增加和减少此模糊区域。 着色器执行动态分支,使得绝大多数像素仅从当前级联读取。