【转载】目标检测之一(传统算法和深度学习的源码学习)
这里写自定义目录标题
- 欢迎使用Markdown编辑器
- 新的改变
- 功能快捷键
- 合理的创建标题,有助于目录的生成
- 如何改变文本的样式
- 插入链接与图片
- 如何插入一段漂亮的代码片
- 生成一个适合你的列表
- 创建一个表格
- 设定内容居中、居左、居右
- SmartyPants
- 创建一个自定义列表
- 如何创建一个注脚
- 注释也是必不可少的
- KaTeX数学公式
- 新的甘特图功能,丰富你的文章
- UML 图表
- FLowchart流程图
- 导出与导入
- 导出
- 导入
欢迎使用Markdown编辑器
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
【转载】目标检测之一(传统算法和深度学习的源码学习)
本系列写一写关于目标检测的东西,包括传统算法和深度学习的方法都会涉及到,注重实验而不着重理论,理论相关的看论文去哈,主要依赖opencv。
一、目标检测有哪些算法,历史简介
最近在做一些目标检测相关的东西,目标检测是计算机视觉里面最重要的课题之一了,很多场合检测和识别都是很重要的,比如现在很火的无人驾驶,就非常依赖目标检测和识别,需要非常高的检测精度和定位精度。
目标检测从很早就开始有了。
传统算法的典型代表有:
Haar特征+Adaboost算法
Hog特征+Svm算法
DPM算法
深度学习的目标检测典型代表有:
RCNN系列,RCNN,spp-net,fast-rcnn,faster-rcnn
YOLO系列,YOLO和YOLO9000
SSD
后来有了深度残差网络ResNet之后,又出现了RFCN,还有最近的mask-rcnn等等,检测效果越来越好,精度越来越高。
二、Haar特征+Adaboost特征检测
作为本系列的第一篇,先来点简单的,我们从Haar特征+Adaboost算法开始。原理很简单。网络上教程一大堆,我这里就不废话了,稍微提下下。
Haar特征有以下几种:

Adaboost算法是机器学习里面的一种集成学习的算法,说的通俗点,就是用弱分类器(分类能力较差,但是也要大于0.5)级联加权组合成强分类器(分类能力较强),在训练过程中会着重训练前面分类错误的样本,及具体做法是增加样本对应的权重。
本次实验检测目标为车辆
使用Haar+Adaboost算法目标检测分为三个步骤:
1、 样本的创建和标记
2、 训练分类器
3、 利用训练好的分类器进行目标检测。
1. 样本的创建和标记
自己做样本是一个非常痛苦和麻烦的事,最好还是自己去网上找些公开的数据集,毕竟像ImageNet比赛或者无人驾驶这么火,公开的数据集很多的。
这里给出几个车辆检测相关数据集链接:
http://www.gti.ssr.upm.es/data/Vehicle_database.html
http://www.cvlibs.net/datasets/kitti/raw_data.php?type=city
正样本,即包含检测对象的图片,使用图像标记工具,网上搜一下有很多的,格式就是,图片名+目标个数+目标的矩形框定位(左上角坐标和矩形长宽)

正样本描述文件vec文件的创建。
已经把目标的情况记录了放在txt文件里,打开cmd窗口,输入createsamples.exe -info positive/info.txt -vec data/vector.vec -num 500 -w 24-h 24。当然你也可以使用.bat文件运行。这句话的-num后面的500表示正样本图片的数目,后面的-w和 -h说的是图片resize成的大小,根据实际情况修改。运行完会生成vector.vec文件,这个就是向量描述文件了。你不用打开看它的内容,其实打开也没用,因为是乱码的,需要专门的软件。后面会用到。
做好这个其实就成功了一大半了,制作正样本很麻烦的。下面看看怎么制、制作负样本。很简单,准备图片(不包含车的图像)1500张,多点也可以。
负样本的制作
然后在当前路径下在cmd窗口运行dir /b *.jpg >neg_name.txt就会生成一个neg_name.txt文件,里面包含当前路径下的所有jpg文件的文件名。

好了,正负样本制作完成,可以开始训练了。我们使用opencv自带的opencv_haartraining.exe文件(opencv安装目录的bin目录下面有该文件)进行训练。

参数看起来很多,有点复杂。不用管它,网上查一下就明白了,很多参数都有默认值。我训练时的命令为
opencv_haartraining.exe-data data/cascade -vec data/vector.vec -bg negative/neg_name.txt -npos 500-nneg 1500 -nstages 20 -mem 4000 -w 24 -h 24
意思依次为 可执行文件名,训练好的xml分类器文件保存地址,正样本描述文件vec文件,负样本的文件名,正负样本的数量,nstages为训练轮数,mem为分配内存MB,图像resize的大小。
训练截图

这个训练过程非常慢,可能要十几二十个小时,看电脑配置和数据量,我当时训练了20多个小时。你可以让它一直训练直到完成,你也可以随时中断训练,然后随时开始,他会接着训练,不会从头再来。
经过漫长的等待训练完成得到xml分类器文件,然后使用opencv的接口即可进行车辆检测了,我是使用detectMultiScale这个函数检测的,就跟人脸检测一样的,然后输出矩形框。我直接贴出检测部分的源代码,其他部分都是直接使用opencv自带的。其实这个也算~~
-
#include
-
#include
-
#include
-
#include
-
using
namespace
std;
-
using
namespace cv;
-
-
int main()
-
{
-
string xmlPath =
"car_model.xml";
//训练好的分类器xml文件
-
CascadeClassifier ccf;
//创建分类器对象
-
Mat img;
-
if (!ccf.load(xmlPath))
//加载训练文件
-
{
-
cout <<
"不能加载指定的xml文件" <<
endl;
-
return
0;
-
}
-
namedWindow(
"car");
-
bool stop =
false;
-
//获取摄像头图像
-
//VideoCapture cap(0);
-
-
//获取文件夹图片序列
-
string img_path =
"data";
//把图片放到当前目录的data文件夹下即可,文件名随便都可以
-
vector
vec_img;
-
glob(img_path, vec_img);
-
if (vec_img.empty())
-
{
-
std::
cout <<
"there is no pictures." <<
endl;
-
return
-1;
-
}
-
//写入视频文件,我处理的是序列图片,所以我把检测结果写成视频文件了,便于观察
-
//VideoWriter writer;
-
//string video_name = "car1.avi";
-
//Mat temp = imread(vec_img[0]);
-
//int frame_fps = 15;
//帧率
-
//writer = VideoWriter(video_name, CV_FOURCC('X', 'V', 'I', 'D'), frame_fps, Size(temp.cols, temp.rows));
-
while (!stop)
-
{
-
int64 start = getTickCount();
-
for (
int i =
0; i < vec_img.size(); ++i)
-
{
-
img = imread(vec_img[i]);
-
//if (!cap.read(img))
-
// break;
-
//cap >> img;
-
vector
cars;
//创建一个容器保存检测出来的车辆
-
Mat gray;
-
cvtColor(img, gray, CV_BGR2GRAY);
//转换成灰度图,因为harr特征从灰度图中提取
-
//equalizeHist(gray, gray); //直方图均衡行
-
ccf.detectMultiScale(gray, cars,
1.1,
3,
0, Size(
10,
10), Size(
100,
100));
//检测车辆
-
//cout << cars.size() << endl;
-
for (
vector
::const_iterator iter = cars.begin(); iter != cars.end(); iter++)
-
{
-
rectangle(img, *iter, Scalar(
0,
0,
255),
2,
8);
//画出矩形
-
}
-
imshow(
"car", img);
-
//writer.write(img);
-
if (waitKey(
2) ==
'q')
//按q退出
-
{
-
stop =
true;
-
break;
-
}
-
}
-
//计算运行时间
-
cout << (getTickCount() - start) / getTickFrequency() <<
endl;
-
break;
-
}
-
-
-
return
1;
-
}
测试效果截图:可以看到对于简单场景 的测试,检测效果还不错,速度超快的,每秒几十帧,几乎都能正确检测出来,但是对于复杂点的场景检测效果就很差了。这个时候就要看深度学习的了
测试场景1:高速公路,目标较少,1700张序列图片(320*240),只需要25s左右.

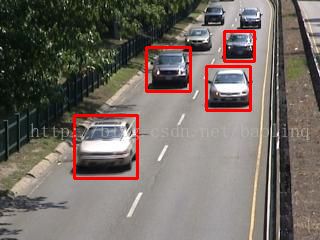
这是高速公路的监控相机下的场景,从上面两幅图像可以看到,远处的车辆几乎都没有检测到,当车辆靠近相机时,就能准确检测到。
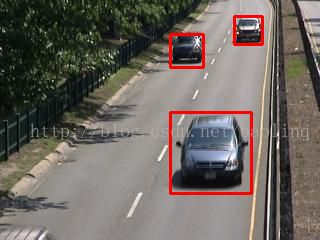

简单场景下检测效果较好,场景中的车辆几乎都能较准确的检测出来。
测试场景2:城市街道,由于光照和场景较复杂,检测效果很差,几乎不能检测出来


深度学习方法的对比,几乎都能正确检测出来,目前用的是YOLO方法进行车辆的检测,速度和精度都比较好,适合用于视频的实时检测。1700帧序列图像(320*240),用时600s左右,相当于大概1秒3帧,速度有点慢
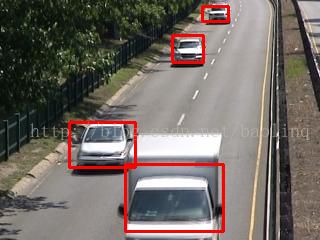


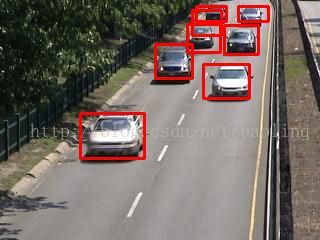
注:由于车辆较多,我把目标的标签和概率去掉了,只保留了检测框。
从上图可以看到,总体检测车辆的效果良好,但第三幅图的时候出现了一个错误的检测,它把马路识别为train。还有第四幅图像,由于目标比较密集,检测框定位不准确



在更复杂的场景中,深度学习的方法表现出了更大的优势,由于光照的原因,场景中的目标不容易被检测,但是YOLO几乎全部准确检测出来。
关于YOLO进行目标检测的东西见本系列第二篇。有问题欢迎在评论区或者邮件交流,我也是初学者,有不对的地方还望各位不吝指正~~
参考文献
[1] ViolaP, Jones M. Rapid object detection using a boosted cascade of simplefeatures[C]// Computer Vision and Pattern Recognition, 2001. CVPR 2001.Proceedings of the 2001 IEEE Computer Society Conference on. IEEE, 2003:I-511-I-518vol.1.
[2] Lienhart R, Maydt J. An extended set of Haar-like features for rapidobject detection[C]// International Conference on Image Processing. 2002.Proceedings. IEEE, 2002:I-900-I-903 vol.1.
[3] http://blog.csdn.net/zhuangxiaobin/article/details/25476833
[4] Redmon J, Farhadi A. YOLO9000: Better, Faster, Stronger[J]. 2016.
你好! 这是你第一次使用 Markdown编辑器 所展示的欢迎页。如果你想学习如何使用Markdown编辑器, 可以仔细阅读这篇文章,了解一下Markdown的基本语法知识。
新的改变
我们对Markdown编辑器进行了一些功能拓展与语法支持,除了标准的Markdown编辑器功能,我们增加了如下几点新功能,帮助你用它写博客:
- 全新的界面设计 ,将会带来全新的写作体验;
- 在创作中心设置你喜爱的代码高亮样式,Markdown 将代码片显示选择的高亮样式 进行展示;
- 增加了 图片拖拽 功能,你可以将本地的图片直接拖拽到编辑区域直接展示;
- 全新的 KaTeX数学公式 语法;
- 增加了支持甘特图的mermaid语法1 功能;
- 增加了 多屏幕编辑 Markdown文章功能;
- 增加了 焦点写作模式、预览模式、简洁写作模式、左右区域同步滚轮设置 等功能,功能按钮位于编辑区域与预览区域中间;
- 增加了 检查列表 功能。
功能快捷键
撤销:Ctrl/Command + Z
重做:Ctrl/Command + Y
加粗:Ctrl/Command + B
斜体:Ctrl/Command + I
标题:Ctrl/Command + Shift + H
无序列表:Ctrl/Command + Shift + U
有序列表:Ctrl/Command + Shift + O
检查列表:Ctrl/Command + Shift + C
插入代码:Ctrl/Command + Shift + K
插入链接:Ctrl/Command + Shift + L
插入图片:Ctrl/Command + Shift + G
查找:Ctrl/Command + F
替换:Ctrl/Command + G
合理的创建标题,有助于目录的生成
直接输入1次#,并按下space后,将生成1级标题。
输入2次#,并按下space后,将生成2级标题。
以此类推,我们支持6级标题。有助于使用TOC语法后生成一个完美的目录。
如何改变文本的样式
强调文本 强调文本
加粗文本 加粗文本
标记文本
删除文本
引用文本
H2O is是液体。
210 运算结果是 1024.
插入链接与图片
链接: link.
图片: 
带尺寸的图片:
居中的图片: 
居中并且带尺寸的图片:
当然,我们为了让用户更加便捷,我们增加了图片拖拽功能。
如何插入一段漂亮的代码片
去博客设置页面,选择一款你喜欢的代码片高亮样式,下面展示同样高亮的 代码片.
// An highlighted block
var foo = 'bar';
生成一个适合你的列表
- 项目
- 项目
- 项目
- 项目1
- 项目2
- 项目3
- 计划任务
- 完成任务
创建一个表格
一个简单的表格是这么创建的:
项目
Value
电脑
$1600
手机
$12
导管
$1
设定内容居中、居左、居右
使用:---------:居中
使用:----------居左
使用----------:居右
第一列
第二列
第三列
第一列文本居中
第二列文本居右
第三列文本居左
SmartyPants
SmartyPants将ASCII标点字符转换为“智能”印刷标点HTML实体。例如:
TYPE
ASCII
HTML
Single backticks
'Isn't this fun?'‘Isn’t this fun?’
Quotes
"Isn't this fun?"“Isn’t this fun?”
Dashes
-- is en-dash, --- is em-dash– is en-dash, — is em-dash
创建一个自定义列表
-
Markdown
-
Text-to-
HTML conversion tool
-
Authors
-
John
-
Luke
如何创建一个注脚
一个具有注脚的文本。2
注释也是必不可少的
Markdown将文本转换为 HTML。
KaTeX数学公式
您可以使用渲染LaTeX数学表达式 KaTeX:
Gamma公式展示 Γ ( n ) = ( n − 1 ) ! ∀ n ∈ N \Gamma(n) = (n-1)!\quad\forall n\in\mathbb N Γ(n)=(n−1)!∀n∈N 是通过欧拉积分
Γ ( z ) = ∫ 0 ∞ t z − 1 e − t d t . \Gamma(z) = \int_0^\infty t^{z-1}e^{-t}dt\,. Γ(z)=∫0∞tz−1e−tdt.
你可以找到更多关于的信息 LaTeX 数学表达式here.
新的甘特图功能,丰富你的文章
Mon 06 Mon 13 Mon 20 已完成 进行中 计划一 计划二 现有任务 Adding GANTT diagram functionality to mermaid
- 关于 甘特图 语法,参考 这儿,
UML 图表
可以使用UML图表进行渲染。 Mermaid. 例如下面产生的一个序列图::
张三 李四 王五 你好!李四, 最近怎么样? 你最近怎么样,王五? 我很好,谢谢! 我很好,谢谢! 李四想了很长时间, 文字太长了 不适合放在一行. 打量着王五... 很好... 王五, 你怎么样? 张三 李四 王五
这将产生一个流程图。:
链接
长方形
圆
圆角长方形
菱形
- 关于 Mermaid 语法,参考 这儿,
FLowchart流程图
我们依旧会支持flowchart的流程图:
Created with Raphaël 2.2.0 开始 我的操作 确认? 结束 yes no
- 关于 Flowchart流程图 语法,参考 这儿.
导出与导入
导出
如果你想尝试使用此编辑器, 你可以在此篇文章任意编辑。当你完成了一篇文章的写作, 在上方工具栏找到 文章导出 ,生成一个.md文件或者.html文件进行本地保存。
导入
如果你想加载一篇你写过的.md文件,在上方工具栏可以选择导入功能进行对应扩展名的文件导入,
继续你的创作。
mermaid语法说明 ↩︎
注脚的解释 ↩︎