深度学习(11)——DeepLab v1
DeepLab v1
DeepLab 由谷歌团队提出的,至今有了四个版本,也就是v1-v4。其结合了深度卷积神经网络(DCNNs)和概率图模型。
在论文《Semantic image segmentation with deep convolutional nets and fully connected CRFs》中提出,发表在 ICLR 2015 。
论文的写作时间是2014年,当时深度卷积神经网络在高级视觉研究领域取得了突破。其卷积和池化操作保证了其不变性,能够提取高级抽象特征。不变性指的是平移不变性,卷积层扩大感知野,池化层的pooling操作,即使图像有小的位移、缩放、扭曲等,提取到的特征依然会保持不变,减小了相对空间位置的影响。这在高级特征提取中作用重大,但在一些低级视觉研究,如语义分割任务中效果是不理想的。我们希望获取具体的空间信息,而这些信息随着网络的加深慢慢丢失掉。
于是对于语义分割任务,DCNN存在两个问题。
第一,最大池化和下采样操作压缩了图像分辨率。一般语义分割通过将网络的全连接层改为卷积层,获取得分图(或称为概率图、热图),然后对其上采样、反卷积等操作还原与输入图像同样大小。如果压缩太厉害,还原后分辨率就会比较低,因此我们希望获得更为稠密(dense)或尺寸更大的得分图;第二,对空间变换的不变性限制了模型的精度,网络丢失了很多细节,获得的概率图会比较模糊,我们希望获得更多的细节。在该文章中,提出使用空洞算法和全连接CRF分别解决这两个问题。
DeeplabV1方法分为两步走,第一步仍然采用了DCNNs得到 coarse score map并插值到原图像大小,然后第二步借用fully connected CRF对从FCN得到的分割结果进行细节上的refine。
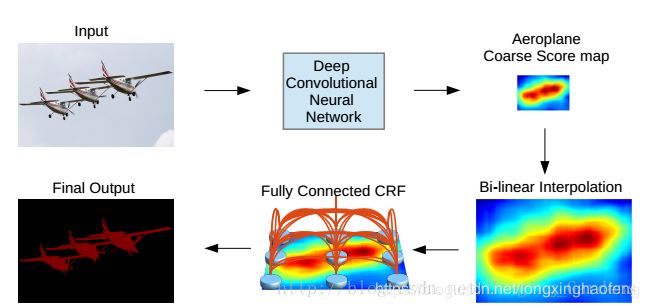
该方法的创新之处在于将DCNNs的特征图与全连接CRF结合,并将Hole(空洞卷积)应用在DCNNs中。
DCNNs基于VGG16模型,网络结构图如下:
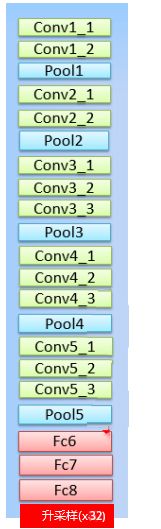
在VGG16中,卷积层的卷积核大小统一为 33 ,步长为 1,最大池化层的池化窗口为 2 * 2 ,步长为2 。
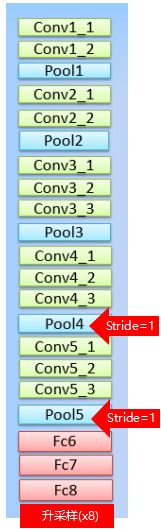
在这基础上做的改进是使用 11 的卷积层代替FC层,那么就变成了全卷积网络,输出得到的是得分图,也可以理解成概率图。将pool4和pool5的步长由2改为1, 这样在原本FC7的位置,VGG网络总的步长由原来的32变为8(总步长=输入size/特征图size)。一般来说,池化层的步长为2,池化后输出大小变为输入大小的一半。原VGG16模型有5次池化,缩小 2 5 = 32 2^5=32 25=32 倍,修改后的VGG16有3次补步长为2的池化,缩小 2 3 = 8 2^3=8 23=8 倍,两次步长为1的池化,输出大小基本不变,所以说VGG网络总的步长由原来的32变为8。
这样改的原因是为了获得更为稠密(dense)的score map。
一旦修改了网络结构,就会面临一个问题,如何既想使用预训练好的网络模型进行微调,又能改变网络结构获得更为稠密的得分图。
感知也(RF)改变,这对使用预训练的网络有何影响?
感知野计算
感知野就是当前这一层的节点往前能看到多少前些层的节点,
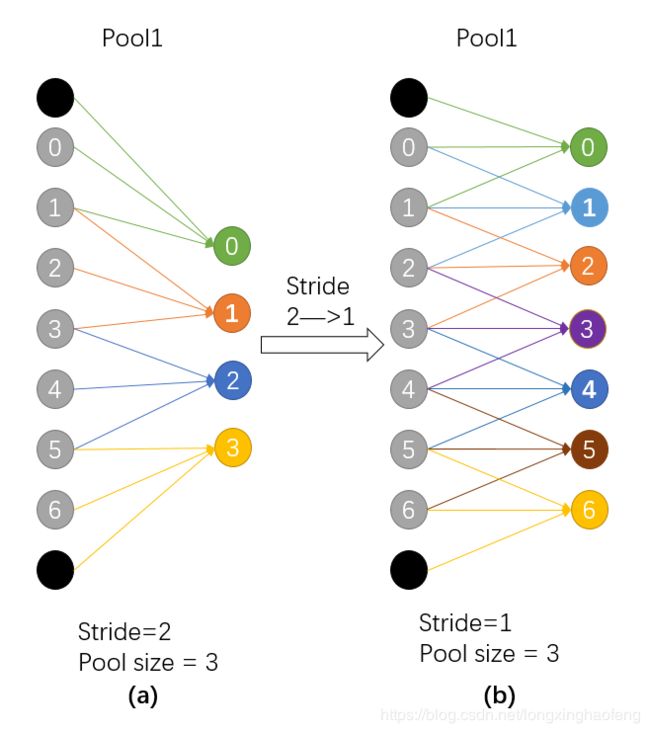
由上图所示,左侧(a)(b)图表示一维卷积层的步长由2变为1后,感知野的变化。(a)输出4个节点,0-3,每个节点的感知野为3;(b)输出7个节点,0-6 ,每个节点的感知野为3。图a的输出0123对于图b输出的0246,感知野相同,但又多了其他节点,使得得分图变得更加稠密。
这里解释一下padding为什么不算在感知野里面,一种直观的方式是,一层的padding一般只有两三个节点,而深度神经网络中每一层的输出有几百上千的节点,而padding只能影响到4-6个节点,这对于一层的输出节点来说是微不足道的。

©的下一层采用hole算法,(d)的第三个2输出来自©的0,2,4,这对应(a)中输出的123,所以d层有b层的所有内容,同时又增加到7个输出(相比与b层的2个输出),所以输出变得稠密了。
很明显,为了保证感知野不变,我们对卷积层滤波器进行了扩张,这就是空洞算法。
使用hole算法后,滤波器 k k k 大小变化为
k = k + ( k − 1 ) ( h l o e s i z e − 1 ) k = k + (k-1)(hloe\,size -1) k=k+(k−1)(hloesize−1)
如图,假设原始滤波器大小为3,hole 大小为2,那么扩张后滤波器大小为 5 。扩张部分用0填充。
感知野计算由输入层后的第一层开始依次往后计算
第一层卷积层的输出特征图像素的感受野的大小等于滤波器的大小
感受野计算公式
S n = S n − 1 ∗ s R F n = R F n − 1 + ( k n − 1 ) ∗ S n − 1 S_{n} = S_{n-1} * s \\ RF_{n} = RF_{n-1} + (k_n-1) * S_{n-1} Sn=Sn−1∗sRFn=RFn−1+(kn−1)∗Sn−1
其中, S n S_{n} Sn 是网络前 n n n 层strides, s s s 是这一层的strides。 R F n RF_{n} RFn 是上一层的RF, R F n − 1 RF_{n-1} RFn−1 是这一层的RF, k n k_n kn 表示卷积核大小,padding对感受野无影响。
使用hole算法后,卷积核大小变化
k = k + ( k − 1 ) ( h l o e s i z e − 1 ) k = k + (k-1)(hloe\,size -1) k=k+(k−1)(hloesize−1)
以VGG16为例,计算感知野。
C o n v 1.1 R 1 = 3 , S 1 = 1 C o n v 1.2 R 2 = R 1 + ( 3 − 1 ) ∗ S 1 = 5 , S 2 = S 1 ∗ 1 = 1 P o o l 1 R 3 = R 2 + ( 2 − 1 ) ∗ S 2 = 6 , S 3 = S 2 ∗ 2 = 2 C o n v 2.1 R 4 = R 3 + ( 3 − 1 ) ∗ S 3 = 10 , S 4 = S 3 ∗ 1 = 2 C o n v 2.2 R 5 = R 4 + ( 3 − 1 ) ∗ S 4 = 14 , S 5 = S 4 ∗ 1 = 2 P o o l 2 R 6 = R 5 + ( 2 − 1 ) ∗ S 5 = 16 , S 6 = S 5 ∗ 2 = 4 C o n v 3.1 R 7 = R 6 + ( 3 − 1 ) ∗ S 6 = 24 , S 7 = S 6 ∗ 1 = 4 C o n v 3.2 R 8 = R 7 + ( 3 − 1 ) ∗ S 7 = 32 , S 8 = S 7 ∗ 1 = 4 C o n v 3.3 R 9 = R 8 + ( 3 − 1 ) ∗ S 8 = 40 , S 9 = S 8 ∗ 1 = 4 P o o l 3 R 10 = R 9 + ( 2 − 1 ) ∗ S 9 = 44 , S 10 = S 9 ∗ 2 = 8 C o n v 4.1 R 11 = R 10 + ( 3 − 1 ) ∗ S 10 = 60 , S 11 = S 10 ∗ 1 = 8 C o n v 4.2 R 12 = R 11 + ( 3 − 1 ) ∗ S 11 = 76 , S 12 = S 11 ∗ 1 = 8 C o n v 4.3 R 13 = R 12 + ( 3 − 1 ) ∗ S 12 = 92 , S 13 = S 12 ∗ 1 = 8 P o o l 4 R 14 = R 13 + ( 2 − 1 ) ∗ S 13 = 100 , S 14 = S 13 ∗ 2 = 16 C o n v 5.1 R 15 = R 14 + ( 3 − 1 ) ∗ S 14 = 132 , S 15 = S 14 ∗ 1 = 16 C o n v 5.2 R 16 = R 15 + ( 3 − 1 ) ∗ S 15 = 164 , S 16 = S 15 ∗ 1 = 16 C o n v 5.3 R 17 = R 16 + ( 3 − 1 ) ∗ S 16 = 196 , S 17 = S 16 ∗ 1 = 16 P o o l 5 R 18 = R 17 + ( 2 − 1 ) ∗ S 17 = 212 , S 18 = S 17 ∗ 2 = 32 f c 6 R 19 = R 18 + ( 1 − 1 ) ∗ S 18 = 212 , S 19 = S 18 ∗ 1 = 32 f c 7 R 20 = R 19 + ( 1 − 1 ) ∗ S 19 = 212 , S 20 = S 19 ∗ 1 = 32 Conv1.1\quad R_1 = 3,\quad S_1=1 \\ Conv1.2\quad R_2 = R_1 + (3-1)*S_1 = 5,\quad S_2=S_1 * 1 = 1 \\ Pool1\qquad R_3 = R_2 + (2-1)*S_2 = 6,\quad S_3=S_2 * 2 = 2 \\ Conv2.1\quad R_4 = R_3 + (3-1)*S_3 = 10,\quad S_4=S_3 * 1 = 2 \\ Conv2.2\quad R_5 = R_4 + (3-1)*S_4 = 14,\quad S_5=S_4 * 1 = 2 \\ Pool2\qquad R_6 = R_5 + (2-1)*S_5 = 16,\quad S_6=S_5 * 2 = 4 \\ Conv3.1\quad R_7 = R_6 + (3-1)*S_6 = 24,\quad S_7=S_6 * 1 = 4 \\ Conv3.2\quad R_8 = R_7 + (3-1)*S_7 = 32,\quad S_8=S_7 * 1 = 4 \\ Conv3.3\quad R_9 = R_8 + (3-1)*S_8 = 40,\quad S_9=S_8 * 1 = 4 \\ Pool3\qquad R_{10} = R_9 + (2-1)*S_9 = 44,\quad S_{10}=S_9 * 2 = 8 \\ Conv4.1\quad R_{11} = R_{10} + (3-1)*S_{10} = 60,\quad S_{11}=S_{10} * 1 = 8 \\ Conv4.2\quad R_{12} = R_{11} + (3-1)*S_{11} = 76,\quad S_{12}=S_{11} * 1 = 8 \\ Conv4.3\quad R_{13} = R_{12} + (3-1)*S_{12} = 92,\quad S_{13}=S_{12} * 1 = 8 \\ Pool4\qquad R_{14} = R_{13} + (2-1)*S_{13} = 100,\quad S_{14}=S_{13} * 2 = 16 \\ Conv5.1\quad R_{15} = R_{14} + (3-1)*S_{14} = 132,\quad S_{15}=S_{14} * 1 = 16 \\ Conv5.2\quad R_{16} = R_{15} + (3-1)*S_{15} = 164,\quad S_{16}=S_{15} * 1 = 16 \\ Conv5.3\quad R_{17} = R_{16} + (3-1)*S_{16} = 196,\quad S_{17}=S_{16} * 1 = 16 \\ Pool5\qquad R_{18} = R_{17} + (2-1)*S_{17} = 212,\quad S_{18}=S_{17} * 2 = 32 \\ fc6\qquad\quad R_{19} = R_{18} + (1-1)*S_{18} = 212,\quad S_{19}=S_{18} * 1 = 32 \\ fc7\qquad\quad R_{20} = R_{19} + (1-1)*S_{19} = 212,\quad S_{20}=S_{19} * 1 = 32 \\ Conv1.1R1=3,S1=1Conv1.2R2=R1+(3−1)∗S1=5,S2=S1∗1=1Pool1R3=R2+(2−1)∗S2=6,S3=S2∗2=2Conv2.1R4=R3+(3−1)∗S3=10,S4=S3∗1=2Conv2.2R5=R4+(3−1)∗S4=14,S5=S4∗1=2Pool2R6=R5+(2−1)∗S5=16,S6=S5∗2=4Conv3.1R7=R6+(3−1)∗S6=24,S7=S6∗1=4Conv3.2R8=R7+(3−1)∗S7=32,S8=S7∗1=4Conv3.3R9=R8+(3−1)∗S8=40,S9=S8∗1=4Pool3R10=R9+(2−1)∗S9=44,S10=S9∗2=8Conv4.1R11=R10+(3−1)∗S10=60,S11=S10∗1=8Conv4.2R12=R11+(3−1)∗S11=76,S12=S11∗1=8Conv4.3R13=R12+(3−1)∗S12=92,S13=S12∗1=8Pool4R14=R13+(2−1)∗S13=100,S14=S13∗2=16Conv5.1R15=R14+(3−1)∗S14=132,S15=S14∗1=16Conv5.2R16=R15+(3−1)∗S15=164,S16=S15∗1=16Conv5.3R17=R16+(3−1)∗S16=196,S17=S16∗1=16Pool5R18=R17+(2−1)∗S17=212,S18=S17∗2=32fc6R19=R18+(1−1)∗S18=212,S19=S18∗1=32fc7R20=R19+(1−1)∗S19=212,S20=S19∗1=32
pool4的stride由2变为1,则紧接着的conv5_1, conv5_2和conv5_3中hole size为2。接着pool5由2变为1, 则后面的fc6中hole size为4。 计算感知野。
P o o l 4 R 14 = R 13 + ( 2 − 1 ) ∗ S 13 = 100 , S 14 = S 13 ∗ 1 = 8 C o n v 5.1 R 15 = R 14 + ( 5 − 1 ) ∗ S 14 = 132 , S 15 = S 14 ∗ 1 = 8 C o n v 5.2 R 16 = R 15 + ( 5 − 1 ) ∗ S 15 = 164 , S 16 = S 15 ∗ 1 = 8 C o n v 5.3 R 17 = R 16 + ( 5 − 1 ) ∗ S 16 = 196 , S 17 = S 16 ∗ 1 = 8 P o o l 5 R 18 = R 17 + ( 2 − 1 ) ∗ S 17 = 212 , S 18 = S 17 ∗ 1 = 8 f c 6 R 19 = R 18 + ( 1 − 1 ) ∗ S 18 = 212 , S 19 = S 18 ∗ 1 = 8 f c 7 R 20 = R 19 + ( 1 − 1 ) ∗ S 19 = 212 , S 20 = S 19 ∗ 1 = 8 Pool4\qquad R_{14} = R_{13} + (2-1)*S_{13} = 100,\quad S_{14}=S_{13} * 1 = 8 \\ Conv5.1\quad R_{15} = R_{14} + (5-1)*S_{14} = 132,\quad S_{15}=S_{14} * 1 = 8 \\ Conv5.2\quad R_{16} = R_{15} + (5-1)*S_{15} = 164,\quad S_{16}=S_{15} * 1 = 8 \\ Conv5.3\quad R_{17} = R_{16} + (5-1)*S_{16} = 196,\quad S_{17}=S_{16} * 1 = 8 \\ Pool5\qquad R_{18} = R_{17} + (2-1)*S_{17} = 212,\quad S_{18}=S_{17} * 1 = 8 \\ fc6\qquad\quad R_{19} = R_{18} + (1-1)*S_{18} = 212,\quad S_{19}=S_{18} * 1 = 8 \\ fc7\qquad\quad R_{20} = R_{19} + (1-1)*S_{19} = 212,\quad S_{20}=S_{19} * 1 = 8 \\ Pool4R14=R13+(2−1)∗S13=100,S14=S13∗1=8Conv5.1R15=R14+(5−1)∗S14=132,S15=S14∗1=8Conv5.2R16=R15+(5−1)∗S15=164,S16=S15∗1=8Conv5.3R17=R16+(5−1)∗S16=196,S17=S16∗1=8Pool5R18=R17+(2−1)∗S17=212,S18=S17∗1=8fc6R19=R18+(1−1)∗S18=212,S19=S18∗1=8fc7R20=R19+(1−1)∗S19=212,S20=S19∗1=8

为什么要保证感知野大小不变
使用预训练模型,一是使用其网络结构,二是使用训练好的权重来进行初始化。
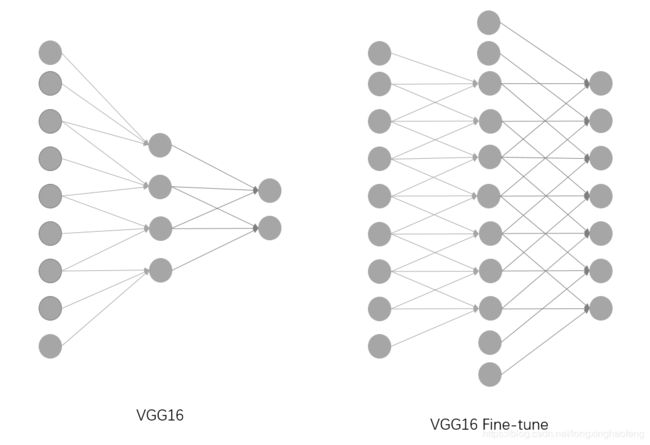
如图所示,这里我们对网络结构进行了微调,增加了一些网络节点,并且保证感知野大小不变。
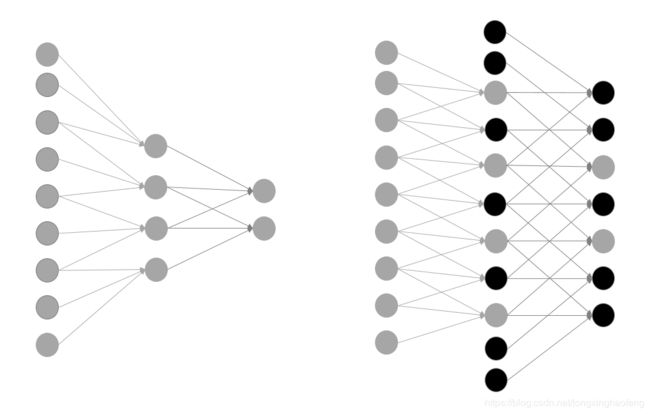
如右侧图像所示,只需要在新增加的节点处初始化为0(黑色节点),就可以使用预训练好的权重进行初始化。
Fully connected CRF
CNN是一个逐步提取特征的部分,原始位置信息会随着网络深度的增加而减少或消失。CRF在传统图像处理上的应用是做一个平滑。CRF简单说,是在决定一个位置的像素值时(paper里是label),会考虑周围像素点的值(label)。但是通过CNN得到的概率图在一定程度上已经足够平滑,所以短程的CRF没有太大的意义。于是考虑使用Fully connected CRF,这样就会综合考虑全局信息,恢复详细的局部结构,如精确图形的轮廓。CRF几乎可以用于所有的分割任务中图像精度的提高。
CRF是后处理,是不参与训练的,在测试时对特征提取后得到的得分图进行双线性插值,恢复到原图尺寸,然后再进行CRF处理,因为缩小8倍的,所以直接放大到原图是可以接受的。如果是32倍,则需要上采样(反卷积)。

第一列是原图像和Ground Truth;第二列是DCNN的输出,上面是得分图(Score map),下面是置信图(Belief map)。最后一个DCNN层的输出用作CRF的输入。后面三列分别是CRF迭代1、2、10次后的得分图和置信图。
CRF中使用的是softmax后的概率图。
令随机变量 x i x_i xi 是像素 i i i 的标签, x i ∈ L = { l 1 , l 2 , ⋯ , l L } x_i\in L=\left\{l_1,l_2,\cdots,l_L\right\} xi∈L={l1,l2,⋯,lL} , L L L 是语义标签。令隐藏标签变量 X = { x 1 , x 2 , ⋯ , x N } X =\left\{x_1,x_2,\cdots,x_N\right\} X={x1,x2,⋯,xN}, N N N就是图像的像素个数,全局观测是 I = { i 1 , i 2 , ⋯ , i N } I = \left\{ i_1,i_2,\cdots,i_N \right\} I={i1,i2,⋯,iN} ,要根据全局观测像素 I I I 推测标签变量 X X X 。 可以建立CRF模型,其条件概率为:
P ( X ∣ I ) = 1 Z exp ( − E ( x ∣ I ) ) P(X|I) = \frac{1}{Z}\exp(-E(x|I)) P(X∣I)=Z1exp(−E(x∣I))
规范化因子为 Z Z Z ,对所有分子求和得到,以确保 P ( X ) P(X) P(X) 是被正确定义的概率。
Z = ∑ e x p ( − E ( x ∣ I ) ) Z = \sum exp(-E(x|I)) Z=∑exp(−E(x∣I))
势函数 ψ = e x p ( − E ( x ∣ I ) ) \psi = exp(-E(x|I)) ψ=exp(−E(x∣I)) :用于定义在全局观测 I I I 下, x x x 之间的相关关系。
能量函数:
E ( x ) = ∑ i θ i ( x i ) + ∑ i j θ i j ( x i , x j ) E(x) = \sum_i \theta_i(x_i) + \sum_{ij}\theta_{ij}(x_i,x_j) E(x)=i∑θi(xi)+ij∑θij(xi,xj)
能量越大,势能越小,概率越小。
上式中,第一项仅考虑单节点,也就是一元能量项 θ i ( x i ) \theta_i(x_i) θi(xi) ,他代表将像素 i i i 判别(条件随机场是判别模型)成label x i x_i xi 的能量。一元能量项直接来自于前端的FCN,FCN输出的是概率 P ( x i ) P(x_i) P(xi),所以 θ i ( x i ) = − log P ( x i ) \theta_i(x_i)=−\log P(x_i) θi(xi)=−logP(xi) 。
第二项考虑一对节点的关系,也就是二元能量项 θ i j ( x i , x j ) θ_{ij}(x_i,x_j) θij(xi,xj) ,他鼓励相似(距离小)像素分配相同的标签,相差较大的像素分配不同的标签,而这个“距离”的定义与颜色值和实际相对距离有关。
θ i j ( x i , x j ) = μ ( x i , x j ) [ w 1 e x p ( − ∣ ∣ p i − p j ∣ ∣ 2 2 σ α 2 − ∣ ∣ I i − I j ∣ ∣ 2 2 σ β 2 ) + w 2 e x p ( − ∣ ∣ p i − p j ∣ ∣ 2 2 σ γ 2 ) ] θ_{ij}(x_i,x_j)=\mu(x_i,x_j) \left[w_1 exp(-\frac{|| p_i-p_j ||^2}{2\sigma^2_{\alpha}} - \frac{|| I_i-I_j ||^2}{2\sigma^2_{\beta}}) + w_2 exp(-\frac{|| p_i-p_j ||^2}{2\sigma^2_{\gamma}}) \right] θij(xi,xj)=μ(xi,xj)[w1exp(−2σα2∣∣pi−pj∣∣2−2σβ2∣∣Ii−Ij∣∣2)+w2exp(−2σγ2∣∣pi−pj∣∣2)]
当 x i ̸ = x j x_i\not=x_j xi̸=xj 时, μ ( x i , x j ) = 1 \mu(x_i,x_j)=1 μ(xi,xj)=1 ,否则为零。也就是说,只有当标签不同时,才会有第二项,才会增大能量 E E E。
中括号中的表达式是在不同特征空间的两个高斯核函数,第一个基于双边高斯函数基于像素位置 p p p 和像素颜色强度 I I I,强制相似RGB和位置的像素分在相似的label中,第二个只考虑像素位置,等于施加一个平滑项。 超参数 σ α , σ β , σ γ \sigma_{\alpha},\sigma_{\beta},\sigma_{\gamma} σα,σβ,σγ 控制高斯核的权重。
对于一张图像来说,我们把它看成图模型 G = ( V , E ) G=(V,E) G=(V,E),图模型的每个顶点对应一个像素点,即 V = { i 1 , i 2 , ⋯ , i n } V=\left\{i_1,i_2,\cdots,i_n \right\} V={i1,i2,⋯,in}。对于边来说,
(1)如果是稀疏条件随机场,那么我们构造图模型的边集合 E E E 就是:每对相邻的像素点间可以构造一条边。当然除了4邻域构造边之外,你也可以用8邻域模型。
(2)全连接条件随机场与稀疏条件随机场的最大差别在于:每个像素点都与所有的像素点相连接构成连接边。而二元势函数描述的是每一个像素与其他所有像素的关系,所以叫“全连接”。
参考
谷歌——DeepLab v1
【语义分割】- DeeplabV1&V2
感知野理解及其计算方法
卷积神经网络物体检测之感受野大小计算
对卷积层dilation膨胀的作用的理解,caffe-ssd dilation Hole算法解析
从FCN到DeepLab