高动态成像及神经网络学习笔记
- 前向与反向传导算法
神经网络的前向传导算法:
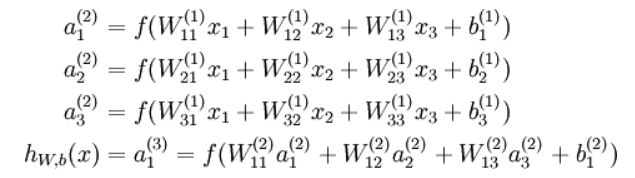
定义神经网络的损失函数:

反向传导算法:第二项为正则化项,也称权重衰减项,减小权重的幅度,防止过度拟合。

梯度下降的单次迭代过程:

- 梯度检验与高级优化
就是要使得计算结果的梯度与其真是结果相近,对于每一个i检查下式是否相近


高动态成像:
基于响应函数与色调映射的方法
- 捕获不同曝光度的多张图像
以下代码基于python:
import cv2
import numpy as np
def readImagesAndTimes(): # 曝光时间列表
times = np.array([ 1/30.0, 0.25, 2.5, 15.0 ], dtype=np.float32) # 图像文件名称列表
filenames = ["img_0.033.jpg", "img_0.25.jpg", "img_2.5.jpg", "img_15.jpg"]
images = []
for filename in filenames:
im = cv2.imread(filename)
images.append(im)
return images, times
- 对齐图像
# 对齐输入图像
alignMTB = cv2.createAlignMTB()
alignMTB.process(images, images)
- 寻找最优响应函数
# 获取图像响应函数 (CRF)
calibrateDebevec = cv2.createCalibrateDebevec()
responseDebevec = calibrateDebevec.process(images, times)
- 合并图像
# 将图像合并为HDR线性图像
mergeDebevec = cv2.createMergeDebevec()
hdrDebevec = mergeDebevec.process(images, times, responseDebevec)
# 保存图像
cv2.imwrite("hdrDebevec.hdr", hdrDebevec)
-
色调映射
有好几种方法,首先有以下几个概念 -
伽马gamma:
该参数通过应用伽马校正来压缩动态范围。 当伽马等于 1 时,不应用修正。 小于 1 的伽玛会使图像变暗,而大于 1 的伽马会使图像变亮。

像素归一化与0到1之间
上一部结果的gamma分之1次方
反归一化,是上一部的结果乘以256,减去0.5 -
对比度:
是一个亮度的比值,定义是:在暗室中,白色画面(最亮时)下的亮度除以黑色画面(最暗时)下的亮度。更精准地说,对比度就是把白色信号在100%和0%的饱和度相减,再除以用Lux(光照度,即勒克斯,每平方米的流明值)为计量单位下0%的白色值(0%的白色信号实际上就是黑色),所得到的数值。对比度是最黑与最白亮度单位的相除值。 -
饱和度
是指色彩的鲜艳程度,也称色彩的纯度。饱和度取决于该色中含色成分和消色成分(灰色)的比例。含色成分越大,饱和度越大;消色成分越大,饱和度越小。 -
Drago映射,即自适应对数映射
论文链接
# 使用Drago色调映射算法获得24位彩色图像tonemapDrago = cv2.createTonemapDrago(1.0, 0.7)
ldrDrago = tonemapDrago.process(hdrDebevec)
ldrDrago = 3 * ldrDrago
cv2.imwrite("ldr-Drago.jpg", ldrDrago * 255)
- Durand映射,基于双边滤波的图像分解,再融合的方式:
论文链接
# 使用Durand色调映射算法获得24位彩色图像
tonemapDurand = cv2.createTonemapDurand(1.5,4,1.0,1,1)
ldrDurand = tonemapDurand.process(hdrDebevec)
ldrDurand = 3 * ldrDurand
cv2.imwrite("ldr-Durand.jpg", ldrDurand * 255)
- Reinhard映射:
# 使用Reinhard色调映射算法获得24位彩色图像
tonemapReinhard = cv2.createTonemapReinhard(1.5, 0,0,0)
ldrReinhard = tonemapReinhard.process(hdrDebevec)
cv2.imwrite("ldr-Reinhard.jpg", ldrReinhard * 255)
- Mantiuk映射:
# 使用Mantiuk色调映射算法获得24位彩色图像tonemapMantiuk = cv2.createTonemapMantiuk(2.2,0.85, 1.2)
ldrMantiuk = tonemapMantiuk.process(hdrDebevec)
ldrMantiuk = 3 * ldrMantiuk
cv2.imwrite("ldr-Mantiuk.jpg", ldrMantiuk * 255)
响应函数与色调融合:
多曝光融合:
论文作者:Tom Mertens
高斯金字塔:高斯金字塔是最基本的图像塔。首先将原图像作为最底层图像G0(高斯金字塔的第0层),利用高斯核(5*5)对其进行卷积,然后对卷积后的图像进行下采样(去除偶数行和列)得到上一层图像G1,将此图像作为输入,重复卷积和下采样操作得到更上一层图像,反复迭代多次,形成一个金字塔形的图像数据结构,即高斯金字塔。
拉普拉斯金字塔:在高斯金字塔的运算过程中,图像经过卷积和下采样操作会丢失部分高频细节信息。为描述这些高频信息,人们定义了拉普拉斯金字塔(Laplacian Pyramid, LP)。用高斯金字塔的每一层图像减去其上一层图像上采样并高斯卷积之后的预测图像,得到一系列的差值图像即为 LP 分解图像。
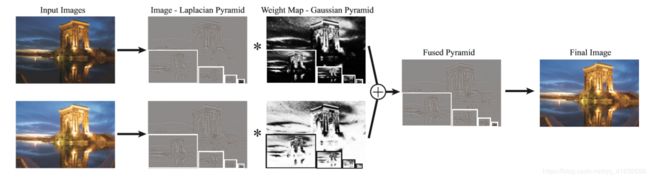
分为两个部分:
- 构造图像的拉普拉斯金字塔(融合过程是在各空间频率层上分别进行的,这样就可以针对不同分解层的不同频带上的特征与细节,采用不同的融合算子以达到突出特定频带上特征与细节的目的),权值的高斯金字塔(稍微模糊下图片,防止图像因为梯度的急剧变化产生较高的权重,产生缝seam),把拉普拉斯金字塔图像与权重的高斯金字塔图像相加,然后用合成的图像上采样累加,得到融合的图像,可以是HDR图像。
以下代码基于matlab:
%构建高斯金字塔
function pyr = gaussian_pyramid(I,nlev)
r = size(I,1);
c = size(I,2);
if ~exist('nlev')
nlev = floor(log(min(r,c)) / log(2));
end
pyr = cell(nlev,1);
pyr{1} = I;
filter = pyramid_filter;
for l = 2:nlev
I = downsample(I,filter);
pyr{l} = I;
end
%构建拉普拉斯金字塔
function pyr = laplacian_pyramid(I,nlev)
r = size(I,1);
c = size(I,2);
if ~exist('nlev')
nlev = floor(log(min(r,c)) / log(2));
end
pyr = cell(nlev,1);
filter = pyramid_filter;
J = I;
for l = 1:nlev - 1
I = downsample(J,filter);
odd = 2*size(I) - size(J); % for each dimension, check if the upsampled version has to be odd
pyr{l} = J - upsample(I,odd,filter);
J = I;
end
pyr{nlev} = J;
- 利用基于饱和度,对比度,曝光程度的测试方法来衡量最后结果的好坏。对比度使用拉普拉斯滤波的结果作为对比度参数,饱和度对每个通道的每个像素算其标准差,然后该像素三个通道的之加起来的结果作为饱和度参数,曝光程度对每个像素的每个通道值算其高斯分布,然后相乘得到曝光程度参数。以此来决定输入每个图片的权值。
% contrast measure
function C = contrast(I)
h = [0 1 0; 1 -4 1; 0 1 0]; % laplacian filter
N = size(I,4);
C = zeros(size(I,1),size(I,2),N);
for i = 1:N
mono = rgb2gray(I(:,:,:,i));
C(:,:,i) = abs(imfilter(mono,h,'replicate'));
end
% saturation measure
function C = saturation(I)
N = size(I,4);
C = zeros(size(I,1),size(I,2),N);
for i = 1:N
% saturation is computed as the standard deviation of the color channels
R = I(:,:,1,i);
G = I(:,:,2,i);
B = I(:,:,3,i);
mu = (R + G + B)/3;
C(:,:,i) = sqrt(((R - mu).^2 + (G - mu).^2 + (B - mu).^2)/3);
end
% well-exposedness measure
function C = well_exposedness(I)
sig = .2;
N = size(I,4);
C = zeros(size(I,1),size(I,2),N);
for i = 1:N
R = exp(-.5*(I(:,:,1,i) - .5).^2/sig.^2);
G = exp(-.5*(I(:,:,2,i) - .5).^2/sig.^2);
B = exp(-.5*(I(:,:,3,i) - .5).^2/sig.^2);
C(:,:,i) = R.*G.*B;
end