RANSAC算法理解
最早应该是十四讲上见过,在第九章的project中src中的visual_odometry.cpp中,最核心的求解3d-2d的变换中:
//整个核心就是用这个cv::solvePnPRansac()去求解两帧之间的位姿变化
cv::solvePnPRansac( pts3d, pts2d, K, Mat(), rvec, tvec, false, 100, 4.0, 0.99, inliers );当时只是简单的认为是PNP求解,没有注意这个Ransac(不求甚解。。。)。后面直到大伟哥面试趟坑被问到:
特征匹配要是遇到误匹配时,如何筛选处理?
答案就是用ransac算法进行过滤。
下面介绍一下ransac算法,下面为摘抄自:http://blog.csdn.net/fandq1223/article/details/53175964
RANSAC是“RANdom SAmple Consensus(随机抽样一致)”的缩写。它可以从一组包含“局外点”的观测数据集中,通过迭代方式估计数学模型的参数。它是一种不确定的算法——它有一定的概率得出一个合理的结果;为了提高概率必须提高迭代次数。
RANSAC的基本假设是:
(1)数据由“局内点”组成,例如:数据的分布可以用一些模型参数来解释;
(2)“局外点”是不能适应该模型的数据;
(3)除此之外的数据属于噪声。
局外点产生的原因有:噪声的极值;错误的测量方法;对数据的错误假设。
RANSAC也做了以下假设:给定一组(通常很小的)局内点,存在一个可以估计模型参数的过程;而该模型能够解释或者适用于局内点。
一、示例
一个简单的例子是从一组观测数据中找出合适的2维直线。假设观测数据中包含局内点和局外点,其中局内点近似的被直线所通过,而局外点远离于直线。简单的最小二乘法不能找到适应于局内点的直线,原因是最小二乘法尽量去适应包括局外点在内的所有点。相反,RANSAC能得出一个仅仅用局内点计算出模型,并且概率还足够高。但是,RANSAC并不能保证结果一定正确,为了保证算法有足够高的合理概率,我们必须小心的选择算法的参数。

二、概述
RANSAC算法的输入是一组观测数据,一个可以解释或者适应于观测数据的参数化模型,一些可信的参数。
RANSAC通过反复选择数据中的一组随机子集来达成目标。被选取的子集被假设为局内点,并用下述方法进行验证:
1.首先我们先随机假设一小组局内点为初始值。然后用此局内点拟合一个模型,此模型适应于假设的局内点,所有的未知参数都能从假设的局内点计算得出。
2.用1中得到的模型去测试所有的其它数据,如果某个点适用于估计的模型,认为它也是局内点,将局内点扩充。
3.如果有足够多的点被归类为假设的局内点,那么估计的模型就足够合理。
4.然后,用所有假设的局内点去重新估计模型,因为此模型仅仅是在初始的假设的局内点估计的,后续有扩充后,需要更新。
5.最后,通过估计局内点与模型的错误率来评估模型。
整个这个过程为迭代一次,此过程被重复执行固定的次数,每次产生的模型有两个结局:
1、要么因为局内点太少,还不如上一次的模型,而被舍弃,
2、要么因为比现有的模型更好而被选用。
三、算法
伪码形式的算法如下所示:
输入:
data —— 一组观测数据
model —— 适应于数据的模型
n —— 适用于模型的最少数据个数
k —— 算法的迭代次数
t —— 用于决定数据是否适应于模型的阀值
d —— 判定模型是否适用于数据集的数据数目
输出:
best_model —— 跟数据最匹配的模型参数(如果没有找到好的模型,返回null)
best_consensus_set —— 估计出模型的数据点
best_error —— 跟数据相关的估计出的模型错误
iterations = 0
best_model = null
best_consensus_set = null
best_error = 无穷大
while ( iterations < k )
maybe_inliers = 从数据集中随机选择n个点
maybe_model = 适合于maybe_inliers的模型参数
consensus_set = maybe_inliers
for ( 每个数据集中不属于maybe_inliers的点 )
if ( 如果点适合于maybe_model,且错误小于t )
将点添加到consensus_set
if ( consensus_set中的元素数目大于d )
已经找到了好的模型,现在测试该模型到底有多好
better_model = 适合于consensus_set中所有点的模型参数
this_error = better_model究竟如何适合这些点的度量
if ( this_error < best_error )
我们发现了比以前好的模型,保存该模型直到更好的模型出现
best_model = better_model
best_consensus_set = consensus_set
best_error = this_error
增加迭代次数
返回 best_model, best_consensus_set, best_errorRANSAC算法的可能变化包括以下几种:
(1)如果发现了一种足够好的模型(该模型有足够小的错误率),则跳出主循环。这样可能会节约计算额外参数的时间。
(2)直接从maybe_model计算this_error,而不从consensus_set重新估计模型。这样可能会节约比较两种模型错误的时间,但可能会对噪声更敏感。
其实核心就是随机性和假设性。随机性用于减少计算了,那个循环次数就是利用正确数据出现的概率。所谓的假设性,就是说随机抽出来的数据我都认为是正确的,并以此去计算其他点,获得其他满足变换关系的点,然后利用投票机制,选出获票最多的那一个变换。
四、参数
我们不得不根据特定的问题和数据集通过实验来确定参数t和d。然而参数k(迭代次数)可以从理论结果推断。当我们从估计模型参数时,用p表示一些迭代过程中从数据集内随机选取出的点均为局内点的概率;此时,结果模型很可能有用,因此p也表征了算法产生有用结果的概率。用w表示每次从数据集中选取一个局内点的概率,如下式所示:
w = 局内点的数目 / 数据集的数目
通常情况下,我们事先并不知道w的值,但是可以给出一些鲁棒的值。假设估计模型需要选定n个点, wn w n 是所有n个点均为局内点的概率; 1−wn 1 − w n 是n个点中至少有一个点为局外点的概率,此时表明我们从数据集中估计出了一个不好的模型。 (1−wn)k ( 1 − w n ) k 表示算法永远都不会选择到n个点均为局内点的概率,它和1-p相同。因此,
我们对上式的两边取对数,得出:
值得注意的是,这个结果假设n个点都是独立选择的;也就是说,某个点被选定之后,它可能会被后续的迭代过程重复选定到。这种方法通常都不合理,由此推导出的k值被看作是选取不重复点的上限。例如,要从上图中的数据集寻找适合的直线,RANSAC算法通常在每次迭代时选取2个点,计算通过这两点的直线maybe_model,要求这两点必须唯一。
为了得到更可信的参数,标准偏差或它的乘积可以被加到k上。k的标准偏差定义为:
五、优点与缺点
RANSAC的优点是它能鲁棒的估计模型参数。例如,它能从包含大量局外点的数据集中估计出高精度的参数。RANSAC的缺点是它计算参数的迭代次数没有上限;如果设置迭代次数的上限,得到的结果可能不是最优的结果,甚至可能得到错误的结果。RANSAC只有一定的概率得到可信的模型,概率与迭代次数成正比。RANSAC的另一个缺点是它要求设置跟问题相关的阀值。
RANSAC只能从特定的数据集中估计出一个模型,如果存在两个(或多个)模型,RANSAC不能找到别的模型。
六、应用
RANSAC算法经常用于计算机视觉,例如同时求解相关问题与估计立体摄像机的基础矩阵,在图像拼接时求变换矩阵的时候。
利用到SLAM中,经常被用于虑除误匹配:
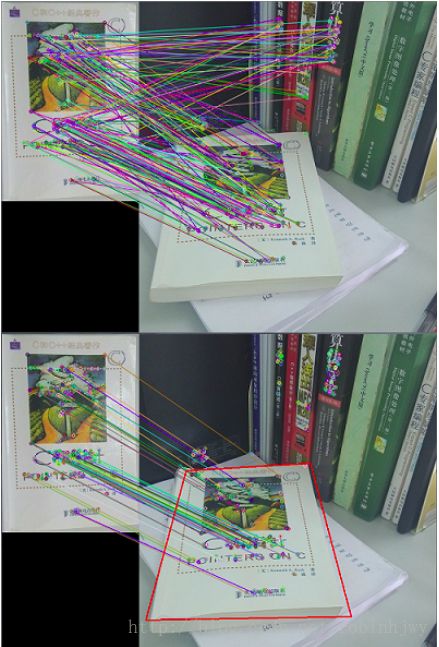
要的就是上图中的效果。
1.RANSAC原理
OpenCV中滤除误匹配对采用RANSAC算法寻找一个最佳单应性矩阵H,矩阵大小为3×3。RANSAC目的是找到最优的参数矩阵使得满足该矩阵的数据点个数最多,通常令 h33=1 h 33 = 1 来归一化矩阵。由于单应性矩阵有8个未知参数,至少需要8个线性方程求解,对应到点位置信息上,一组点对可以列出两个方程,则至少包含4组匹配点对。
其中(x,y)表示目标图像角点位置,(x’,y’)为场景图像角点位置,s为尺度参数。
RANSAC算法从匹配数据集中随机抽出4个样本并保证这4个样本之间不共线,计算出单应性矩阵,然后利用这个模型测试所有数据,并计算满足这个模型数据点的个数与投影误差(即代价函数),若此模型为最优模型,则对应的代价函数最小。
RANSAC算法步骤:
1. 随机从数据集中随机抽出4个样本数据 (此4个样本之间不能共线),计算出变换矩阵H,记为模型M;
2. 计算数据集中所有数据与模型M的投影误差,若误差小于阈值,加入内点集 I ;
3. 如果当前内点集 I 元素个数大于最优内点集 I_best , 则更新 I_best = I,同时更新迭代次数k ;
4. 如果迭代次数大于k,则退出 ; 否则迭代次数加1,并重复上述步骤;
注:迭代次数k在不大于最大迭代次数的情况下,是在不断更新而不是固定的,见上方k的更新;
其中,p为置信度,一般取0.995;w为”内点”的比例 ; m为计算模型所需要的最少样本数=4;
求得单应矩阵后就好办了,把内点留下,内点就是筛选后的好用的点,外点舍弃,外点就有可能是误匹配的点。
下面再回国头看十四讲中用的ransac函数:
/**
* 函数原型:
* CV_EXPORTS_W bool solvePnPRansac( InputArray objectPoints, InputArray imagePoints,
InputArray cameraMatrix, InputArray distCoeffs,
OutputArray rvec, OutputArray tvec,
bool useExtrinsicGuess = false, int iterationsCount = 100,
float reprojectionError = 8.0, double confidence = 0.99,
OutputArray inliers = noArray(), int flags = SOLVEPNP_ITERATIVE);
* 参数:
* objectPoints,要匹配的3d空间点数组
* objectPoints,要匹配的2d图像点数组
* cameraMatrix,相机内参矩阵
* distCoeffs,相机畸变矩阵
* rvec,旋转向量输出承接数组
* tvec,平移向量输出承接数组
* 后面的参数跟ransac算法有关。倒是都有默认值
* useExtrinsicGuess,迭代初始值是否定为提供的rvec和tvec值,这里没有提供,所以用false
* iterationsCount,迭代次数,ransac算法所必须的迭代次数
* reprojectionError,重投影误差。ransac算法迭代时也必须要规定的误差阀值,来确定是否为内点。
* confidence,置信度。ransac算法每次用于更新迭代次数的参数。一般固定选为0.995
* inliers,内点输出承接数组
* flags, Method for solving a PnP problem。
*/
cv::solvePnPRansac ( pts3d, pts2d, K, Mat(), rvec, tvec, false, 100, 4.0, 0.99, inliers );是在求解PNP时直接调用了solvePnPRansac()函数,此函数求解PNP的同时能够对结果进行ransac筛选。设定好相应参数即可。