深度学习中常见的参数优化方法
- SGD ![]()
与全量梯度下降相比,SGD的特点如下:
优点 : 由于每次只涉及一个样本,因此梯度计算速度很快;
缺点 : 每次计算梯度时只受单个样本的影响,所以导致梯度的准确度下降,可能会导致loss曲线的震荡
改进方案 : 可以采用MinBatch-GD,或者SGD + Momentum
- SGD + Momentum
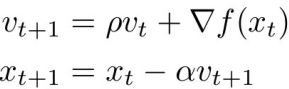
通常将V0初始化为0, pho置为0.9或者0.99, 与SGD相比,在梯度更新时保留了上一步的梯度信息,从而使得梯度更加稳健.换个说法就是,如果当前计算出来的梯度方向与历史梯度方向不一致,则当前梯度会被历史梯度所修正(亦即:梯度衰减)。
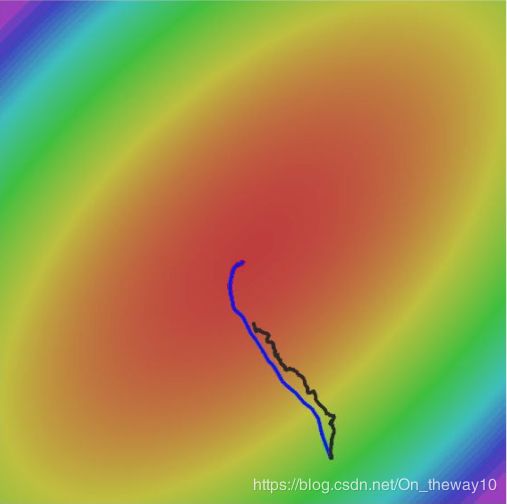

图1. SGD(black) vs SGD+Momentum(blue) 图2. SGD(black) vs SGD+Momentum(blue) vs Nestrov (green)
- Nesterov Momentum 
Nesterov Momentum核心思想是:在计算当前梯度时,“向前”展望一下,这样往往会加速算法的收敛。其示意图如下所示:
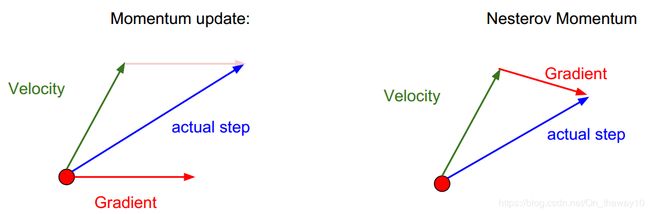
SGD-Momentum是基于当前位置xt来计算梯度的;而Nesterov Momentum则是在展望点xt+rho*vt进行计算的。
一般而言,将上式变形 : ![]() ,我们可以得到与SGD-Momentum梯度更新的方式一致的表达形式:
,我们可以得到与SGD-Momentum梯度更新的方式一致的表达形式:

- AdaGrad
以SGD的更新方式为例,对于每一个参数的训练都采用了相同的学习率alpha,相应的更新量为:![]() ,这种更新策略存在一个潜在的问题:对于那些取值比较大的分量,可能会导致“步子迈得太大”;对于那些取值比较小的分量,可能又存在“步子迈得太小”。而不论是前者还是后者,都可能会延缓了模型的收敛速度,为了缓解这种情况,AdaGrad算法做了如下修正:
,这种更新策略存在一个潜在的问题:对于那些取值比较大的分量,可能会导致“步子迈得太大”;对于那些取值比较小的分量,可能又存在“步子迈得太小”。而不论是前者还是后者,都可能会延缓了模型的收敛速度,为了缓解这种情况,AdaGrad算法做了如下修正:
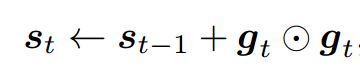
其中,![]() 表示对应位置相乘,其核心思想是:通过
表示对应位置相乘,其核心思想是:通过![]() 将前t轮的梯度信息按照对应位置元素的平方和的形式进行累加,
将前t轮的梯度信息按照对应位置元素的平方和的形式进行累加,![]() epsilon为平滑项,其取值一般为1e-8 ~ 1e-7,用来预防数值下溢。在AdaGrad算法中,不同的元素分别拥有⾃⼰的学习率,从而实现“因地制宜”,而不是SGD中的的“统一步调”。AdaGrad更新算法的缺点是:在训练的中后期,由于分母上梯度平方的累计效应,将会使得梯度趋于0,从而导致训练提前结束。
epsilon为平滑项,其取值一般为1e-8 ~ 1e-7,用来预防数值下溢。在AdaGrad算法中,不同的元素分别拥有⾃⼰的学习率,从而实现“因地制宜”,而不是SGD中的的“统一步调”。AdaGrad更新算法的缺点是:在训练的中后期,由于分母上梯度平方的累计效应,将会使得梯度趋于0,从而导致训练提前结束。
- RMSProp
RMSProp更新算法是由Geoff Hinton团队于2012年提出[1],针对AdaGrad可能导致训练提前终止的缺点,它做了如下的改进:


其中,![]() 。RMSProp算法的核心思想是:通过将第t-1轮的状态变量
。RMSProp算法的核心思想是:通过将第t-1轮的状态变量![]() 和第t轮的梯度信息按照对应位置元素的平方和相加来生成第t轮的状态变量
和第t轮的梯度信息按照对应位置元素的平方和相加来生成第t轮的状态变量![]() 。与AdaGrad相比,在RMSProp中⾃变量每个元素的学习率在迭代过程中就不再⼀直降低,或者降低得速度相对缓慢一些。
。与AdaGrad相比,在RMSProp中⾃变量每个元素的学习率在迭代过程中就不再⼀直降低,或者降低得速度相对缓慢一些。
- AdamAdam是Adaptive moments的缩写,它由Diederik P. Kingma和Jimmy Ba于2014年提出[2],是目前深度学习领域中应用非常广泛的优化方法。Adam算法结合了Momentum系列方法和RMSProp指数加权的移动平均策略,Momentum的更新格式如下:
![]()
其中, 0 ≤ β1 < 1(作者建议值为0.9),v0一般初始化为0. 中间状态变量更新如下:
![]()
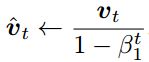
其中,0 ≤ β2 < 1(作者建议取值为0.999),![]() 一般初始化为0.考虑到算法迭代初期,t取值较小,梯度信息的富集速度较慢,eg:当t=1时, v1 = 0.1g1,为了消除这样的影响,作者对更新后的v和s进行修正,具体格式如下:
一般初始化为0.考虑到算法迭代初期,t取值较小,梯度信息的富集速度较慢,eg:当t=1时, v1 = 0.1g1,为了消除这样的影响,作者对更新后的v和s进行修正,具体格式如下:
 ,
,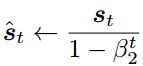
利用修正后的v和s得到最终用于更新参数的修正梯度:
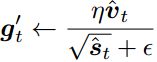
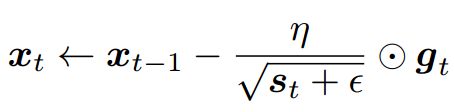
相应的参数迭代更新格式为:
![]()
参考文献:
[1]. Tieleman, T., & Hinton, G. (2012). Lecture 6.5-rmsprop: Divide the gradient by a running average of its recent magnitude. COURSERA: Neural networks for machine learning, 4(2), 26- 31.
[2]. Diederik P. Kingma, Jimmy Ba. Adam: A Method for Stochastic Optimization [arXiv-2014]