图像算法之二:特征提取算法系列之Harris
Harris算子介绍:
该算子是C.Harris和M.J.Stephens在1988年提出的一种点特征提取算子。这种算子受信号处理中自相关函数的启发,可以给出图像中某一像素点的自相关矩阵肘,其特征值是自相关函数的一阶曲率,如果X,Y两个方向上的曲率值都高,那么就认为该点是角点。
Harris[2]角点检测算子是Moravec角点检测算子的改进.
(1)算子用高斯函数代替二值窗口函数,对离中心点越近的像素赋于越大的权重,以减少噪声影响。
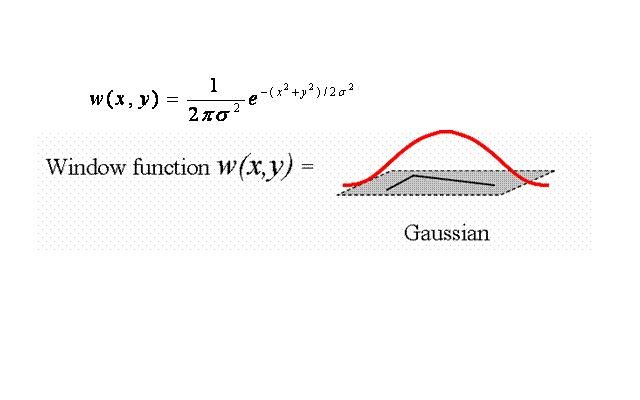
图1-3高斯函数
(2)Moravec算子只考虑了每隔45度方向,Harris算子用Taylor展开去近似任意方向。
写成矩阵形式: :
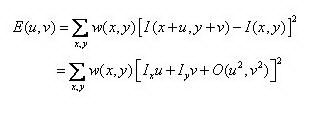 式子(1-2)
式子(1-2)
 式子(1-3)
式子(1-3)
式中,Ix为x方向的差分,Iy为y方向的差分,w(x,y)为高斯函数。
(3) Harris采用了一种新的角点判定方法。矩阵M的两个特征向量l1和l2与矩阵M的主曲率成正比。Harris利用l1, l2来表征变化最快和最慢的两个方向.若两个都很大就是角点,一个大一个小就是边缘,两个都小就是在变化缓慢的图像区域。
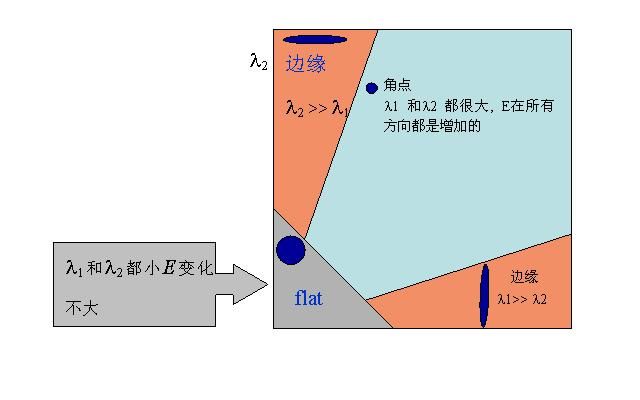
图1- 4用矩阵M的特征向量分类图像像素点
但是解特征向量需要比较多的计算量,且两个特征值的和等于矩阵M的迹,两个特征值的积等于矩阵M的行列式。所以用(1-4)式来判定角点质量。(k常取0.04-0.06)
 (1-4)
(1-4)
(4) Harris算法总结
Step 1:对每一像素点计算相关矩阵M。

Step 2:计算每像素点的Harris 角点响应。

Step 3.在w*w范围内寻找极大值点,若Harris 角点响应大于阀值,则视为角点。
Harris算子对灰度的平移是不变的,因为只有差分,对旋转也有不变性,但是对尺度很敏感,在一个尺度下是角点, 在在另一个尺度下可能就不是了.
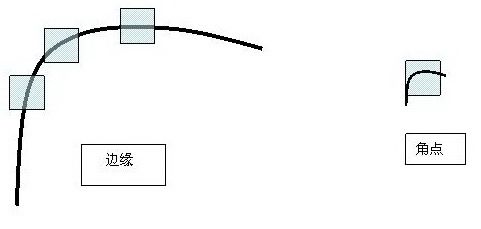
图1- 5 harris算子对尺度的敏感性
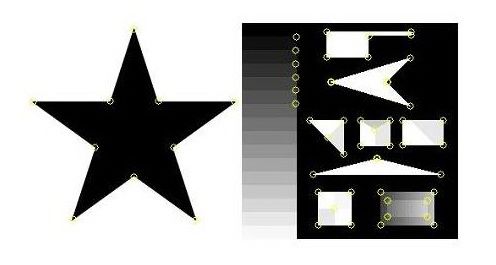
图1- 6 harris算子对简单图像的响应
Harris 算子是一种有效的点特征提取算子,其优点总结起来有:
①计算简单:Harris 算子中只用到灰度的一阶差分以及滤波,操作简单。
②提取的点特征均匀而且合理:Harris 算子对图像中的每个点都计算其兴趣值,然后在邻域中选择最优点。实验表明,在纹理信息丰富的区域,Harris 算子可以提取出大量有用的特征点,而在纹理信息少的区域,提取的特征点则较少。
③稳定:Harris算子的计算公式中只涉及到一阶导数,因此对图像旋转、灰度变化、噪声影响和视点变换不敏感,它也是比较稳定的一种点特征提取算子。
Harris 算子的局限性有:
①它对尺度很敏感,不具有尺度不变性。
②提取的角点是像素级的。
参考文献:
[1]Chris Harris, Mike Stephens, A Combined Corner and Edge Detector, 4th Alvey Vision Conference, 1988, pp147-151