在ubantu16.04 配置ROS开发realsense435功能包
本文主要对intel的一款实感相机realsense435 进行配置,将ROS对realsense435支持的功能包进行安装。
一、安装SDK
1、简要介绍、鉴于自己安装过程中出现的问题,现在在安装之前先确认几件事情。
-
本篇所用环境 ubantu16.04 非ARM框架
-
Ubuntu 16.04/18.04 LTS (Linux Kernels 4.4, 4.8 ,4.10, 4.13, 4.15 and 4.16)
-
其实不仅仅是对485安装,对于Intel® RealSense™ D系列都是差不多的
-
这里我想着重谈一下版本,这里要装的ros功能包realsense-ros版本是2.2.5.
对应的librealsense版本是LibRealSense v2.22.0 -
gcc版本
-
具体对应关系可在下面链接查到
[版本关系] https://github.com/IntelRealSense/realsense-ros/releases/tag/2.2.5
2、安装librealsense SDK
-
1、查看系统内核版本
uanme -r
我的如下

-
2、下载需要的librealsense SDK包
上面说了我需要的是v2.2.0,所以可以进入下面的下载链接进行下载,下载完成后,解压到home下,并统一改名为librealsnse
[下载链接] https://github.com/IntelRealSense/librealsense/releases/tag/v2.22.0
当然不仅仅限于这个版本,具体什么版本参考你需要什么版本的ros功能包 -
2.1 切换到librealsense目录下,安装依赖包
cd ~/librealsense
sudo apt-get install git libssl-dev libusb-1.0-0-dev pkg-config libgtk-3-dev libglfw3-dev
注:这里要装的是必要的包,当然对于您的电脑,接下来可能会出现找不到某个模块,这时不要慌,找度娘安装一下包就好
-
2.2 运行位于librealsense根目录的Intel Realsense权限脚本:
./scripts/setup_udev_rules.sh
-
2.3 构建并应用修补的内核模块
./scripts/patch-realsense-ubuntu-lts.sh
3、Building librealsense2.22 SDK
注意:在build之前,要把摄像头拔掉
-
3.1 通过运行一下命令检查生成的日志以及检查内核日志中的最新条目来检查已修补的模块安装
sudo dmesg | tail -n 50
-
3.2 开始 building之前的准备
运行下面命令查看自己的gcc版本
gcc --version
我的如下:

如果不是5.0以上,则需要更换版本
运行下面命令更换 gcc 版本:
sudo add-apt-repository ppa:ubuntu-toolchain-r/test
sudo apt-get update
sudo apt-get install gcc-5 g++-5
sudo update-alternatives --install /usr/bin/gcc gcc /usr/bin/gcc-5 60 --slave /usr/bin/g++ g++ /usr/bin/g++-5
sudo update-alternatives --set gcc "/usr/bin/gcc-5"
-
3.3 执行下列一系列命令开始building
cd ~/librealsense
mkdir build && cd build
cmake ../
cmake ../ -DBUILD_EXAMPLES=true -DBUILD_GRAPHICAL_EXAMPLES=false
-
3.4 重新编译并安装librealsense二进制文件
sudo make uninstall && make clean && make && sudo make install
4、测试安装SDK是否成功
把摄像头插上USB3.0的口上,并运行:
realsense-viewer
正常情况下出现下面界面
点击 上面的off如果出现图像,ok证明SDK安装成功,成功如下图:

二、安装 Intel® RealSense™ ROS from Sources
2.1 安装ROS参考下面链接
ROS 安装教程
安装完成之后执行下面命令确保所有需要到包都安装成功
sudo apt-get install ros-kinetic-cv-bridge -y
sudo apt-get install ros-kinetic-image-transport
sudo apt-get install ros-kinetic-tf -y
sudo apt-get install ros-kinetic-diagnostic-updater -y
sudo apt-get install ros-kinetic-ddynamic-reconfigure -y
2.2 安装 Intel® RealSense™ ROS from Sources
-
2.2.1 ROS安装完成后,按照一下命令创建工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src/
-
2.2.2 下载Intel® RealSense™ ROS 包,版本一开始说过选择v2.2.5,具体什么版本要对应好才可以,下载完成后解压到“~/catkin_ws/src”目录下。
2.3 执行下面命令进行编译功能包
cd ~/catkin_ws/src/
catkin_init_workspace
cd ..
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
如果你幸运的化,到此你已经安装成功,在终端中输入一下命令即可验证
-
2.3.1 要在ROS中启动摄像头节点
roslaunch realsense2_camera rs_camera.launch
如果没有报错,并且显示如下,说明你已经启动了发布摄像头节点

可以输入 一下命令查看话题列表
rostopic list
显示如下:

此时,你可以更改 rs_camera.launch和rs_rgbd.launch中的参数 默认为false,改成true,即可在rviz中查看点云。
输入命令打开rviz
rviz
点击 Add
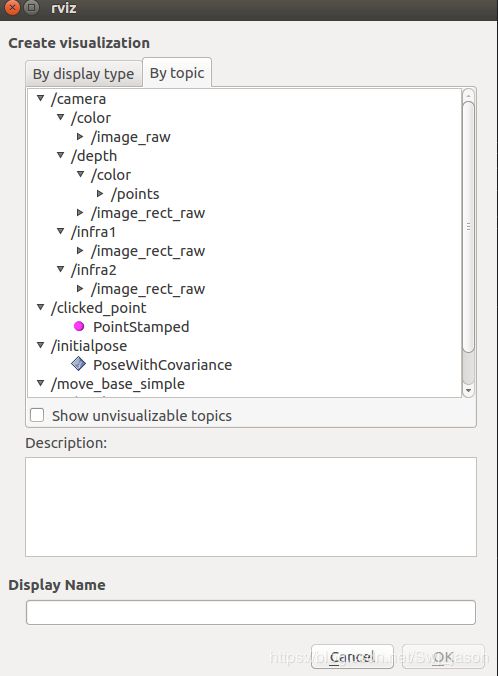
配置左边desktop 如下:显示点云和深度图
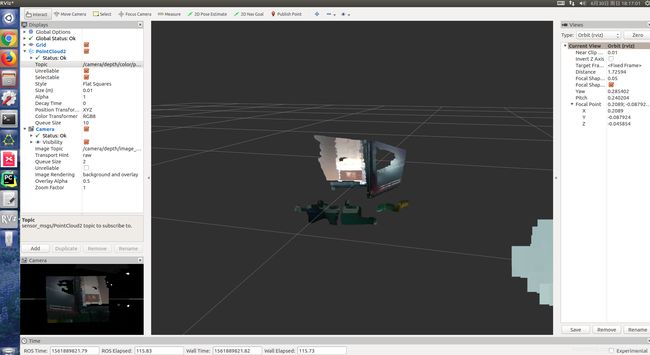
至此完成所有的安装,可以进行二次开发。
三、参考资料
[1] https://github.com/IntelRealSense/realsense-ros
[2] https://github.com/IntelRealSense/librealsense/releases
[3] https://github.com/IntelRealSense/librealsense/blob/master/doc/installation.md
[4] https://blog.csdn.net/sinat_23853639/article/details/88044019