opencv 表示图像的IplImage
一、IplImage
大部分内容摘抄自http://blog.csdn.net/xiaowei_cqu/article/details/7557063
OpenCV资料:http://blog.csdn.net/to_utopia/article/details/4856171
IplImage是表示一个图像的结构体,因为之前的OpenCV是用C语言编写的,所以IplImage提供的接口是C语言接口。
typedef struct _IplImage
{
int nSize; /* IplImage大小 */
int ID; /* 版本 (=0)*/
int nChannels; /* 大多数OPENCV函数支持1,2,3 或 4 个通道 */
int alphaChannel; /* 被OpenCV忽略 */
int depth; /* 像素的位深度: IPL_DEPTH_8U, IPL_DEPTH_8S, IPL_DEPTH_16U,
IPL_DEPTH_16S, IPL_DEPTH_32S, IPL_DEPTH_32F and IPL_DEPTH_64F 可支持 */
char colorModel[4]; /* 被OpenCV忽略 */
char channelSeq[4]; /* 同上 */
int dataOrder; /* 0 - 交叉存取颜色通道, 1 - 分开的颜色通道.
cvCreateImage只能创建交叉存取图像 */
int origin; /* 0 - 顶—左结构,
1 - 底—左结构 (Windows bitmaps 风格) */
int align; /* 图像行排列 (4 or 8). OpenCV 忽略它,使用 widthStep 代替 */
int width; /* 图像宽像素数 */
int height; /* 图像高像素数*/
struct _IplROI *roi;/* 图像感兴趣区域. 当该值非空只对该区域进行处理 */
struct _IplImage *maskROI; /* 在 OpenCV中必须置NULL */
void *imageId; /* 同上*/
struct _IplTileInfo *tileInfo; /*同上*/
int imageSize; /* 图像数据大小(在交叉存取格式下imageSize=image->height*image->widthStep),单位字节*/
char *imageData; /* 指向排列的图像数据 */
int widthStep; /* 排列的图像行大小,以字节为单位 */
int BorderMode[4]; /* 边际结束模式, 被OpenCV忽略 */
int BorderConst[4]; /* 同上 */
char *imageDataOrigin; /* 指针指向一个不同的图像数据结构(不是必须排列的),是为了纠正图像内存分配准备的 */
}
IplImage; 创建方法:
1,如果是从新创造一个Iplimage,则用IplImage* cvCreateImage( CvSize size, int depth, int channels ),它创建头并分配数据。
注:当不再使用这个新图像时,要调用void cvReleaseImage( IplImage** image )将它的头和图像数据释放!
2,如果有图像数据没有为图像头分配存储空间(即,没有为IplImage*指针分配动态存储空间),则先调用IplImage* cvCreateImageHeader( CvSize size, int depth, int channels )创建图像头,再调用void cvSetData( CvArr* arr, void* data, int step )指定图像数据,可以理解为将这个新图像的数据指针指向了一个已存在的图像数据上,不存在图像数据存储空间的分配操作。
注:当不再使用这个新图像时,要调用void cvReleaseImageHeader( IplImage** image )将它的图像头释放!
3,如果有图像数据也有图像头(用于IplImage为静态分配存储空间的情况),则先调用IplImage* cvInitImageHeader( CvSize size, int depth, int channels )更改图像头,再调用void cvSetData( CvArr* arr, void* data, int step )指定图像数据。
注:因为这个新图像使用的是其它图像的数据和已有的图像头,所以不能使用cvReleaseImage将它的头和图像数据释放,也不能使用cvReleaseData将它的图像数据释放!
4,如果从已有的一个图像创建,则用IplImage* cvCloneImage( const IplImage* image ),它制作图像的完整拷贝包括头、ROI和数据。
注:当不再使用这个新图像时,要调用void cvReleaseImage( IplImage** image )将它的头和图像数据释放!
直接访问:
对我们来说比较重要的两个元素是:char *imageData以及widthStep。imageData存放图像像素数据,而widStep类似CvMat中的step,表示以字节为单位的行数据长度。
一个m*n的单通道字节型图像,其imageData排列如下:

如果我们要遍历图像中的元素,只需:
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);
uchar* tmp;
for(int i=0;iheight;i++)
for(int j=0;jwidth;j++)
*tmp=((uchar *)(img->imageData + i*img->widthStep))[j]; 多通道浮点型
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_32F,3);
((float *)(img->imageData + i*img->widthStep))[j*img->nChannels + 0]=111; // B
((float *)(img->imageData + i*img->widthStep))[j*img->nChannels + 1]=112; // G
((float *)(img->imageData + i*img->widthStep))[j*img->nChannels + 2]=113; // R这种直接访问的方法速度快,但容易出错,我们可以通过定义指针来访问。即:
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);
ucha* data=(uchar *)img->imageData;
int step = img->widthStep/sizeof(uchar);
uchar* tmp;
for(int i=0;iheight;i++)
for(int j=0;jwidth;j++)
*tmp=data[i*step+j]; 而多通道(三通道)字节图像中,imageData排列如下:
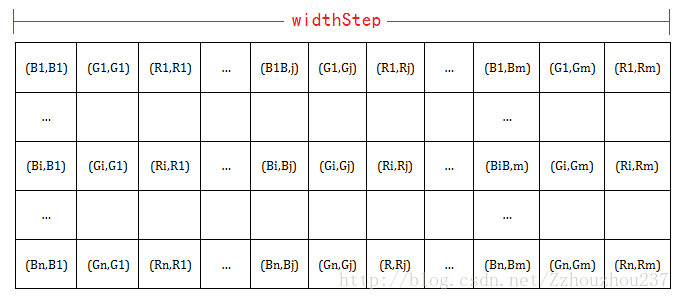
其中(Bi,Bj)(Gi,Gj)(Ri,Rj)表示图像(i,j)处BGR分量的值。使用指针的遍历方法如下:
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,3);
uchar* data=(uchar *)img->imageData;
int step = img->widthStep/sizeof(uchar);
int channels = img->nChannels;
uchar *b,*g,*r;
for(int i=0;iheight;i++)
for(int j=0;jwidth;j++){
*b=data[i*step+j*chanels+0];
*g=data[i*step+j*chanels+1];
*r=data[i*step+j*chanels+2];
} 使用cvGet2D()函数访问图像某位置的像素值:
cvGet*D系列函数可以用来返回特定位置的数组元素(一般使用cvGet2D),原型如下:
CvScalar cvGet1D( const CvArr* arr, int idx0 );
CvScalar cvGet2D( const CvArr* arr, int idx0, int idx1 );
CvScalar cvGet3D( const CvArr* arr, int idx0, int idx1, int idx2 );
CvScalar cvGetND( const CvArr* arr, int* idx ); idx0,idx1,idx2分别用来指示元素数组下标,即cvGet2D返回(idx0,idx1)处元素的值。
因此,单通道图像像素访问方式如下:
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);
double tmp;
for(int i=0;iheight;i++)
for(int j=0;jwidth;j++)
tmp=cvGet2D(img,i,j).val[0]; 多通道字节型/浮点型图像:
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_32F,3);
double tmpb,tmpg,bmpr;
for(int i=0;iheight;i++)
for(int j=0;jwidth;j++){
tmpb=cvGet2D(img,i,j).val[0];
tmpg=cvGet2D(img,i,j).val[1];
tmpr=cvGet2D(img,i,j).val[2];
}
```
如果是修改元素的值,可用cvSet*D(一般是cvSet2D)函数:
这种方法对于任何图像的访问方式是一样的,比较简单,但效率较低,不推荐使用。 void cvSet1D( CvArr* arr, int idx0, CvScalar value );
void cvSet2D( CvArr* arr, int idx0, int idx1, CvScalar value );
void cvSet3D( CvArr* arr, int idx0, int idx1, int idx2, CvScalar value );
void cvSetND( CvArr* arr, int* idx, CvScalar value );
也可通过以下方式访问像素并修改(nRowIndex,nColumIndex)uchar* ptr;
ptr=(uchar*)(img.imageData + nRowIndex* img.widthStep);
if (ptr[nColumIndex] != 255)
{
ptr[nColumIndex] = 255;//(nRowIndex,nColumIndex)的像素值修改为255
}
“`