Caffe在Cifar10上复现ResNet
Caffe在Cifar10上复现ResNet
ResNet在2015年的ImageNet竞赛上的识别率达到了非常高的水平,这里我将使用Caffe在Cifar10上复现论文4.2节的Cifar实验。
- ResNet的基本模块
- Caffe实现
- Cifar10上的实验结果及说明
ResNet的基本模块
本文参照Torch7在Cifar10上复现ResNet的实验,使用Caffe复现之。ResNet的基本模块可以如下python代码:
@requires_authorization
from __future__ import print_function
from caffe import layers as L, params as P, to_proto
from caffe.proto import caffe_pb2
import caffe
# helper function for building ResNet block structures
# The function below does computations: bottom--->conv--->BatchNorm
def conv_factory(bottom, ks, n_out, stride=1, pad=0):
conv = L.Convolution(bottom, kernel_size=ks, stride=stride, num_output=n_out, pad=pad,
param = [dict(lr_mult=1, decay_mult=1), dict(lr_mult=2, decay_mult=0)],
bias_filler=dict(type='constant', value=0), weight_filler=dict(type='gaussian', std=0.01))
batch_norm = L.BatchNorm(conv, in_place=True,
param=[dict(lr_mult=0, decay_mult=0), dict(lr_mult=0, decay_mult=0), dict(lr_mult=0, decay_mult=0)])
scale = L.Scale(batch_norm, bias_term=True, in_place=True)
return scale
# bottom--->conv--->BatchNorm--->ReLU
def conv_factory_relu(bottom, ks, n_out, stride=1, pad=0):
conv = L.Convolution(bottom, kernel_size=ks, stride=stride, num_output=n_out, pad=pad,
param=[dict(lr_mult=1, decay_mult=1), dict(lr_mult=2, decay_mult=0)],
bias_filler=dict(type='constant', value=0), weight_filler=dict(type='gaussian', std=0.01))
batch_norm = L.BatchNorm(conv, in_place=True, param=[dict(lr_mult=0, decay_mult=0), dict(lr_mult=0, decay_mult=0), dict(lr_mult=0, decay_mult=0)])
scale = L.Scale(batch_norm, bias_term=True, in_place=True)
relu = L.ReLU(scale, in_place=True)
return relu
# Residual building block! Implements option (A) from Section 3.3. The input
# is passed through two 3x3 convolution layers. Currently this block only supports
# stride == 1 or stride == 2. When stride is 2, the block actually does pooling.
# Instead of simply doing pooling which may cause representational bottlneck as
# described in inception v3, here we use 2 parallel branches P && C and add them
# together. Note pooling branch may has less channels than convolution branch so we
# need to do zero-padding along channel dimension. And to the best knowledge of
# ours, we haven't found current caffe implementation that supports this operation.
# So later I'll give implementation in C++ and CUDA.
def residual_block(bottom, num_filters, stride=1):
if stride == 1:
conv1 = conv_factory_relu(bottom, 3, num_filters, 1, 1)
conv2 = conv_factory(conv1, 3, num_filters, 1, 1)
add = L.Eltwise(bottom, conv2, operation=P.Eltwise.SUM)
return add
elif stride == 2:
conv1 = conv_factory_relu(bottom, 3, num_filters, 2, 1)
conv2 = conv_factory(conv1, 3, num_filters, 1, 1)
pool = L.Pooling(bottom, pool=P.Pooling.AVE, kernel_size=2, stride=2)
pad = L.PadChannel(pool, num_channels_to_pad=num_filters / 2)
add = L.Eltwise(conv2, pad, operation=P.Eltwise.SUM)
return add
else:
raise Exception('Currently, stride must be either 1 or 2.')
# Generate resnet cifar10 train && test prototxt. n_size control number of layers.
# The total number of layers is 6 * n_size + 2. Here I don't know any of implementation
# which can contain simultaneously TRAIN && TEST phase.
# ==========================Note here==============================
# !!! SO YOU have to include TRAIN && TEST by your own AFTER you use the script to generate the prototxt !!!
def resnet_cifar(train_lmdb, test_lmdb, mean_file, batch_size=100, n_size=3):
data, label = L.Data(source=test_lmdb, backend=P.Data.LMDB, batch_size=batch_size, ntop=2,
transform_param=dict(mean_file=mean_file, crop_size=28), include=dict(phase=getattr(caffe_pb2, 'TEST')))
residual = conv_factory_relu(data, 3, 16, 1, 1)
# --------------> 16, 32, 32 1st group
for i in xrange(n_size):
residual = residual_block(residual, 16)
# --------------> 32, 16, 16 2nd group
residual = residual_block(residual, 32, 2)
for i in xrange(n_size - 1):
residual = residual_block(residual, 32)
# --------------> 64, 8, 8 3rd group
residual = residual_block(residual, 64, 2)
for i in xrange(n_size - 1):
residual = residual_block(residual, 64)
# -------------> end of residual
global_pool = L.Pooling(residual, pool=P.Pooling.AVE, global_pooling=True)
fc = L.InnerProduct(global_pool, param=[dict(lr_mult=1, decay_mult=1), dict(lr_mult=2, decay_mult=1)],num_output=10,
bias_filler=dict(type='constant', value=0), weight_filler=dict(type='gaussian', std=0.01))
loss = L.SoftmaxWithLoss(fc, label)
acc = L.Accuracy(fc, label, include=dict(phase=getattr(caffe_pb2, 'TEST')))
return to_proto(loss, acc)
def make_net(tgt_file):
with open(tgt_file, 'w') as f:
print('name: "resnet_cifar10"', file=f)
print(resnet_cifar('dataset/cifar10_train_lmdb', 'dataset/cifar10_test_lmdb',
'dataset/mean.proto', n_size=9), file=f)
if __name__ == '__main__':
tgt_file='D:/VSProjects/caffe/models/ucas_resnet_cifar10/res56_cifar_train_test.prototxt'
make_net(tgt_file)Caffe实现
首先所有的卷积核采用的都是3x3大小,当stride=1时在ResNet一个block里面通过padding那么feature map的尺寸不变。这是输入可以和经过两个卷积的分支相加。当stride=2时,通过两个卷积的分支feature map的尺寸减半,输入可以通过pooling减半,变为和经过两个卷积分支的尺寸一样,但是可能会导致pooling分支的channel数目少于卷积分支的数目。有两种方式解决这个问题,如原文所描述的那样:1、通过1x1的卷积线性投影,不接任何激活函数,然后直接将卷积核个数设置到跟卷积分支输出的channels个数相等; 2:通过对channel维度进行加零填充,即zero-padding。这里我采用后者方式,下面给出后者的Caffe实现代码(也就是上面python代码中的L.PadChannel对应的C++代码):
#ifndef CAFFE_PAD_CHANNEL_LAYER_HPP_
#define CAFFE_PAD_CHANNEL_LAYER_HPP_
#include "caffe/blob.hpp"
#include "caffe/layer.hpp"
#include "caffe/proto/caffe.pb.h"
namespace caffe {
/*
* @brief zero-padding channel to extend number of channels
*
* Note: Back-propagate just drop the pad derivatives
*/
template <typename Dtype>
class PadChannelLayer : public Layer {
public:
explicit PadChannelLayer(const LayerParameter& param)
: Layer(param) {}
virtual void LayerSetUp(const vector pad_channel_layer.cpp
#include "caffe/layers/pad_channel_layer.hpp"
namespace caffe {
template <typename Dtype>
void PadChannelLayer::LayerSetUp(const vector::Reshape(const vector::Forward_cpu(const vector::Backward_cpu(const vector pad_channel_layer.cu
#include "caffe/layers/pad_channel_layer.hpp"
namespace caffe {
// Copy (one line per thread) from one array to another, with arbitrary
// strides in the last two dimensions.
template <typename Dtype>
__global__ void pad_forward_kernel(const int dst_count, const int src_channels, const int dst_channels,
const int dim, const Dtype* src, Dtype* dst)
{
CUDA_KERNEL_LOOP(index, dst_count)
{
int num = index / (dim * dst_channels);
int dst_c = index / dim % dst_channels;
int pixel_pos = index % dim;
if (dst_c < src_channels)
dst[index] = src[num * src_channels * dim + dst_c * dim + pixel_pos];
else
dst[index] = Dtype(0);
}
}
template <typename Dtype>
void PadChannelLayer::Forward_gpu(const vector << > >(
dst_count, src_channels, dst_channels, dim, bottom_data, top_data);
CUDA_POST_KERNEL_CHECK;
}
template <typename Dtype>
__global__ void pad_backward_kernel(const int bottom_count, const int bottom_channels, const int top_channels,
const int dim, const Dtype* top, Dtype* bottom)
{
CUDA_KERNEL_LOOP(index, bottom_count)
{
int num = index / (dim * bottom_channels);
int bottom_c = index / dim % bottom_channels;
int pixel_pos = index % dim;
bottom[index] = top[num * top_channels * dim + bottom_c * dim + pixel_pos];
}
}
template <typename Dtype>
void PadChannelLayer::Backward_gpu(const vector << > >(
bottom_count, bottom_channels, top_channels, dim, top_diff, bottom_diff);
CUDA_POST_KERNEL_CHECK;
}
INSTANTIATE_LAYER_GPU_FUNCS(PadChannelLayer);
} // namespace caffe
实验结果
1、 使用上述脚本针对Cifar10生成20层的resnet。网络定义太长,这里就不给出来了,但要注意的是因为原图是32x32大小的,这里随机crop 28x28的,并镜像一下。不同于原论文所述的在图片各边补4个像素再随机裁剪32x32的。网络定义的输入部分以及solver.prototxt:
name: "resnet_cifar10"
layer {
name: "input"
type: "Data"
top: "Data1"
top: "label"
include {
phase: TRAIN
}
transform_param {
mean_file: "dataset/mean.proto"
crop_size: 28
mirror: true
}
data_param {
source: "dataset/cifar10_train_lmdb"
batch_size: 100
backend: LMDB
}
}
layer {
name: "input"
type: "Data"
top: "Data1"
top: "label"
include {
phase: TEST
}
transform_param {
mean_file: "dataset/mean.proto"
crop_size: 28
}
data_param {
source: "dataset/cifar10_test_lmdb"
batch_size: 100
backend: LMDB
}
}solver.prototxt如下
net: "res20_cifar_train_test.prototxt"
test_iter: 100 # conver the whole test set. 100 * 100 = 10000 images.
test_interval: 500 # Each 500 is one epoch, test after each epoch
base_lr: 0.1
momentum: 0.9
weight_decay: 0.0001
average_loss: 100
lr_policy: "multistep"
stepvalue: 40000
stepvalue: 80000
gamma: 0.1
display: 100
max_iter: 100000 # 100000 iteration is 200 epochs
snapshot: 500
snapshot_prefix: "trained_model/cifar"
solver_mode: GPU
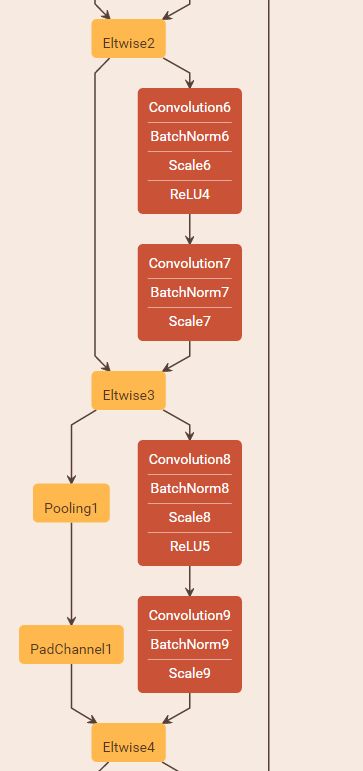
2、 网络结构可视化
由于网络结构太大,这里使用了Netscope对网络进行可视化,并截取部分网络结构图如下:
3、 Cifar10上20层和56层的实验结果准确率对比
| 网络层数 | 本文复现结果 | 原论文结果 |
|---|---|---|
| 20 | 91.19% | 91.25% |
| 56 | 92.54% | 93.03% |
4、 Cifar10 20层的训练曲线以及测试曲线
训练曲线图:

测试曲线图:

5、实验结论
从第3届的表格可以看出,本文使用Caffe复现的resnet在Cifar10上的识别率非常接近论文结果。但比论文结果稍低,可能的原因有,本实验使用的是28x28的切图,原文使用的是32x32的切图, 另外,初始化也有所不同。但总的来说,可以认为复现了原文的结果。