【OpenCV学习笔记】三十九、运动物体检测(一)
运动物体检测(一)
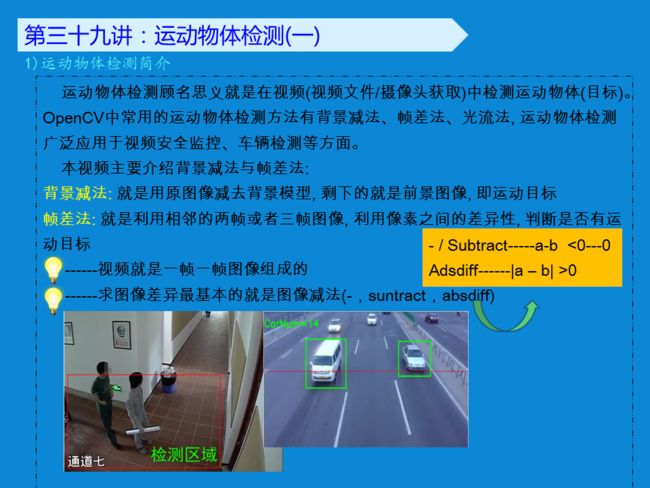
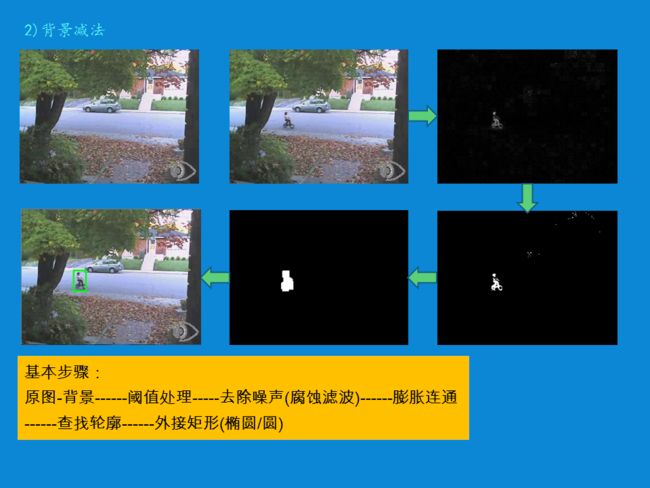
1.运动物体检测——背景减法
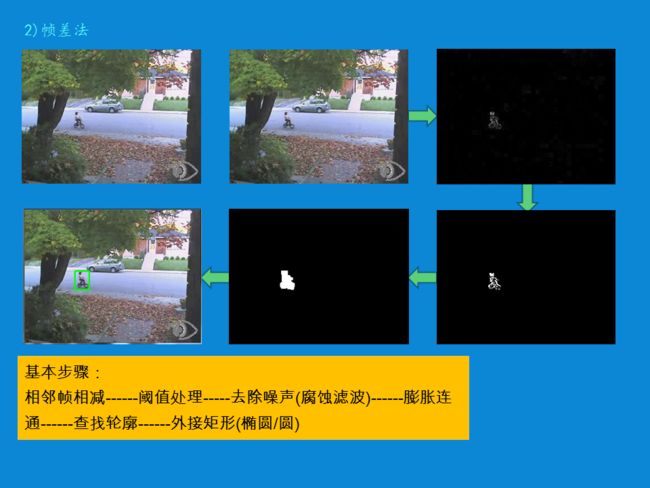
2.运动物体检测——帧差法
先上ppt:

代码:1.运动物体检测——背景减法
///运动物体检测——背景减法
#include "opencv2/opencv.hpp"
using namespace cv;
#include
using namespace std;
//运动物体检测函数声明
Mat MoveDetect(Mat background,Mat frame);
int main()
{
VideoCapture video("bike.avi");//定义VideoCapture类video
if (!video.isOpened()) //对video进行异常检测
{
cout << "video open error!" << endl;
return 0;
}
int frameCount = video.get(CV_CAP_PROP_FRAME_COUNT);//获取帧数
double FPS = video.get(CV_CAP_PROP_FPS);//获取FPS
Mat frame;//存储帧
Mat background;//存储背景图像
Mat result;//存储结果图像
for (int i = 0; i < frameCount; i++)
{
video >> frame;//读帧进frame
imshow("frame", frame);
if (frame.empty())//对帧进行异常检测
{
cout << "frame is empty!" << endl;
break;
}
int framePosition = video.get(CV_CAP_PROP_POS_FRAMES);//获取帧位置(第几帧)
cout << "framePosition: " << framePosition << endl;
if (framePosition == 1)//将第一帧作为背景图像
background = frame.clone();
result = MoveDetect(background, frame);//调用MoveDetect()进行运动物体检测,返回值存入result
imshow("result", result);
if (waitKey(1000.0/FPS) == 27)//按原FPS显示
{
cout << "ESC退出!" << endl;
break;
}
}
return 0;
}
Mat MoveDetect(Mat background, Mat frame)
{
Mat result = frame.clone();
//1.将background和frame转为灰度图
Mat gray1, gray2;
cvtColor(background, gray1, CV_BGR2GRAY);
cvtColor(frame, gray2, CV_BGR2GRAY);
//2.将background和frame做差
Mat diff;
absdiff(gray1, gray2, diff);
imshow("diff", diff);
//3.对差值图diff_thresh进行阈值化处理
Mat diff_thresh;
threshold(diff, diff_thresh, 50, 255, CV_THRESH_BINARY);
imshow("diff_thresh", diff_thresh);
//4.腐蚀
Mat kernel_erode = getStructuringElement(MORPH_RECT, Size(3, 3));
Mat kernel_dilate = getStructuringElement(MORPH_RECT, Size(15, 15));
erode(diff_thresh, diff_thresh, kernel_erode);
imshow("erode", diff_thresh);
//5.膨胀
dilate(diff_thresh, diff_thresh, kernel_dilate);
imshow("dilate", diff_thresh);
//6.查找轮廓并绘制轮廓
vector> contours;
findContours(diff_thresh, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE);
drawContours(result, contours, -1, Scalar(0, 0, 255), 2);//在result上绘制轮廓
//7.查找正外接矩形
vector boundRect(contours.size());
for (int i = 0; i < contours.size(); i++)
{
boundRect[i] = boundingRect(contours[i]);
rectangle(result, boundRect[i], Scalar(0, 255, 0), 2);//在result上绘制正外接矩形
}
return result;//返回result
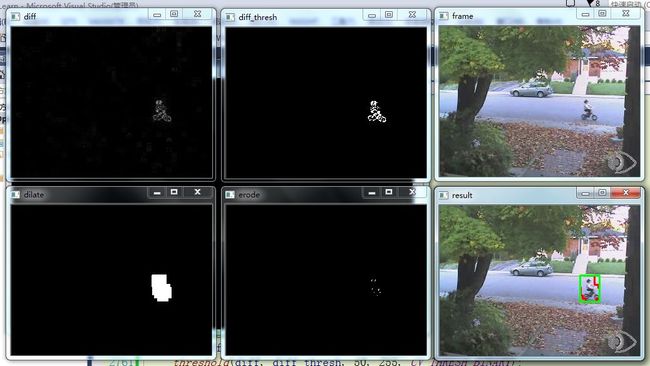
} 运行结果:

代码:2.运动物体检测——帧差法
///运动物体检测——帧差法
#include "opencv2/opencv.hpp"
using namespace cv;
#include
using namespace std;
//运动物体检测函数声明
Mat MoveDetect(Mat temp, Mat frame);
int main()
{
VideoCapture video("bike.avi");//定义VideoCapture类video
if (!video.isOpened()) //对video进行异常检测
{
cout << "video open error!" << endl;
return 0;
}
int frameCount = video.get(CV_CAP_PROP_FRAME_COUNT);//获取帧数
double FPS = video.get(CV_CAP_PROP_FPS);//获取FPS
Mat frame;//存储帧
Mat temp;//存储前一帧图像
Mat result;//存储结果图像
for (int i = 0; i < frameCount; i++)
{
video >> frame;//读帧进frame
imshow("frame", frame);
if (frame.empty())//对帧进行异常检测
{
cout << "frame is empty!" << endl;
break;
}
if (i == 0)//如果为第一帧(temp还为空)
{
result = MoveDetect(frame, frame);//调用MoveDetect()进行运动物体检测,返回值存入result
}
else//若不是第一帧(temp有值了)
{
result = MoveDetect(temp, frame);//调用MoveDetect()进行运动物体检测,返回值存入result
}
imshow("result", result);
if (waitKey(1000.0 / FPS) == 27)//按原FPS显示
{
cout << "ESC退出!" << endl;
break;
}
temp = frame.clone();
}
return 0;
}
Mat MoveDetect(Mat temp, Mat frame)
{
Mat result = frame.clone();
//1.将background和frame转为灰度图
Mat gray1, gray2;
cvtColor(temp, gray1, CV_BGR2GRAY);
cvtColor(frame, gray2, CV_BGR2GRAY);
//2.将background和frame做差
Mat diff;
absdiff(gray1, gray2, diff);
imshow("diff", diff);
//3.对差值图diff_thresh进行阈值化处理
Mat diff_thresh;
threshold(diff, diff_thresh, 50, 255, CV_THRESH_BINARY);
imshow("diff_thresh", diff_thresh);
//4.腐蚀
Mat kernel_erode = getStructuringElement(MORPH_RECT, Size(3, 3));
Mat kernel_dilate = getStructuringElement(MORPH_RECT, Size(18, 18));
erode(diff_thresh, diff_thresh, kernel_erode);
imshow("erode", diff_thresh);
//5.膨胀
dilate(diff_thresh, diff_thresh, kernel_dilate);
imshow("dilate", diff_thresh);
//6.查找轮廓并绘制轮廓
vector> contours;
findContours(diff_thresh, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE);
drawContours(result, contours, -1, Scalar(0, 0, 255), 2);//在result上绘制轮廓
//7.查找正外接矩形
vector boundRect(contours.size());
for (int i = 0; i < contours.size(); i++)
{
boundRect[i] = boundingRect(contours[i]);
rectangle(result, boundRect[i], Scalar(0, 255, 0), 2);//在result上绘制正外接矩形
}
return result;//返回result
} 运行结果: