图像神经风格转换(Neural Style Transfer,NST)
一.概述
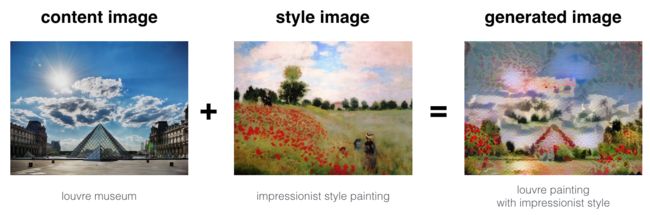
神经风格转换(Neural Style Transfer,NST)是深学习中最有趣的技术之一。如下图所示,它合并两个图像,即“内容”图像(CContent)和“风格”图像(SStyle),以创建“生成的”图像(GGenerated)。生成的图像G将图像C的“内容”与图像S的“风格”相结合。在这个例子中,你将生成一个巴黎卢浮宫博物馆(内容图像C)与一个领袖印象派运动克劳德·莫奈的画(风格图像S)混合起来的绘画。
原理很简单:我们定义了两个差距,一个是内容(Dc),另一个是风格(Ds)。Dc测量两幅图像之间内容的差异程度,而Ds测量两幅图像之间风格的差异程度。然后,我们拍摄第三张图像,输入(例如有噪音的图像),然后对其进行变形,以便将内容与内容图像的差距以及与风格图像的风格差距最小化。
二.pytorch实现
1.图像加载与调整
from PIL import Image
import torch
from torch.autograd import Variable
import torchvision.transforms as transforms
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
use_cuda = torch.cuda.is_available()
imsize = 512 if use_cuda else 128
loader = transforms.Compose([
transforms.Resize(imsize),
transforms.ToTensor()])
def load_image(img_path):
image = Image.open(img_path)
# fake batch dimension required to fit network's input dimensions
image = loader(image).unsqueeze(0)
return image.to(device, torch.float)2.加载vgg19预训练模型
import torch
import torchvision.models as models
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
cnn = models.vgg19(pretrained=True).features.to(device).eval()3.对输入图片做标准化处理
import torch
import torch.nn as nn
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
cnn_normalization_mean = torch.tensor([0.485, 0.456, 0.406]).to(device)
cnn_normalization_std = torch.tensor([0.229, 0.224, 0.225]).to(device)
# create a module to normalize input image so we can easily put it in a
# nn.Sequential
class Normalization(nn.Module):
def __init__(self, mean, std):
super(Normalization, self).__init__()
# .view the mean and std to make them [C x 1 x 1] so that they can
# directly work with image Tensor of shape [B x C x H x W].
# B is batch size. C is number of channels. H is height and W is width.
self.mean = torch.tensor(mean).view(-1, 1, 1)
self.std = torch.tensor(std).view(-1, 1, 1)
def forward(self, img):
# normalize img
return (img - self.mean) / self.std4.计算内容损失
浅层的一个卷积网络往往检测到较低层次的特征,如边缘和简单的纹理,更深层往往检测更高层次的特征,如更复杂的纹理以及对象分类等。
我们希望“生成的”图像G具有与输入图像C相似的内容。假设我们选择了一些层的激活来表示图像的内容,在实践中,如果你在网络中间选择一个层——既不太浅也不太深,你会得到最好的的视觉结果。
假设你选择了一个特殊的隐藏层,现在,将图像C作为已经训练好的VGG网络的输入,然后进行前向传播。让![]() 成为你选择的层中的隐藏层激活,激活值为nH×nW×nC的张量。然后用图像G重复这个过程:将G设置为输入数据,并进行前向传播,让
成为你选择的层中的隐藏层激活,激活值为nH×nW×nC的张量。然后用图像G重复这个过程:将G设置为输入数据,并进行前向传播,让![]() 成为相应的隐层激活,我们将把内容成本函数定义为:
成为相应的隐层激活,我们将把内容成本函数定义为:
![]()
这里可以直接利用pytorch里面的MSE均方损失函数,这里 loss, x, y 的维度是一样的,可以是向量或者矩阵,i是下标。
![]()
import torch
import torch.nn as nn
import torch.nn.functional as F
class ContentLoss(nn.Module):
def __init__(self, target):
super(ContentLoss, self).__init__()
self.target = target.detach()
def forward(self, input):
self.loss = F.mse_loss(input, self.target)
return input注意:这里稍微介绍一下detach()函数:
- 返回一个新的 从当前图中分离的 Variable。
- 返回的 Variable 永远不会需要梯度
- 如果 被 detach 的Variable volatile=True, 那么 detach 出来的 volatile 也为 True
- 还有一个注意事项,即:返回的 Variable 和 被 detach 的Variable 指向同一个 tensor
用处:
如果我们有两个网络 A,B, 两个关系是这样的 y=A(x),z=B(y) 现在我们想用 z.backward() 来为 B 网络的参数来求梯度,但是又不想求 A 网络参数的梯度。我们可以这样:
# y=A(x), z=B(y) 求B中参数的梯度,不求A中参数的梯度 # 第一种方法 y = A(x) z = B(y.detach()) z.backward() # 第二种方法 y = A(x) y.detach_() z = B(y) z.backward()
5.计算风格损失
5.1格拉姆矩阵(gram_matrix)
在线性代数中,一组向量(v1,...,v2)的格拉姆矩阵G是点乘的矩阵,计算细节是![]() ,换句话说,Gij比较了vi与vj的相似之处,如果他们非常相似,那么它们的点积就会很大,所以Gij就很大。
,换句话说,Gij比较了vi与vj的相似之处,如果他们非常相似,那么它们的点积就会很大,所以Gij就很大。
在神经风格转换中,可以通过将降维了的过滤器矩阵与其转置相乘来计算风格矩阵:

计算后的结果是维度为(nC,nC)的矩阵,其中nC是过滤器的数量,Gij测量了过滤器i的激活与过滤器j的激活具有多大的相似度。
风格矩阵Gii的一个重要的部分是对角线的元素,它测量了有效的过滤器i的多少。举个例子,假设过滤器i检测的是图像中的垂直的纹理,那么Gii测量的是图像整体中常见的垂直纹理,如果Gii很大,这意味着图像有很多垂直纹理。
通过捕捉不同类型的特征(Gii)的多少,以及总共出现了多少不同的特征(Gij),那么风格矩阵G就测量的是整个图片的风格。
5.2风格损失
在生成了风格矩阵(Gram matrix / Style matrix)之后,我们的目标是最小化风格图像的S与生成的图像G之间的距离。现在我们只使用单个隐藏层a[l],该层的相应的风格成本定义如下:
![J_{style}^{[l]}(S,G) = \frac{1}{4 \times {n_C}^2 \times (n_H \times n_W)^2} \sum _{i=1}^{n_C}\sum_{j=1}^{n_C}(G^{(S)}_{ij} - G^{(G)}_{ij})^2](http://img.e-com-net.com/image/info8/1f42c395056c4046a6c7fcfa42a673c0.gif)
其中,G(S) 与 G(G)分别是风格图像与生成的图像的Gram矩阵,使用网络中特定隐藏层的激活来计算。
import torch
import torch.nn as nn
import torch.nn.functional as F
def gram_matrix(input):
a, b, c, d = input.size() # a=batch size(=1)
# b=number of feature maps
# (c,d)=dimensions of a f. map (N=c*d)
features = input.view(a * b, c * d) # resise F_XL into \hat F_XL
G = torch.mm(features, features.t()) # compute the gram product
# we 'normalize' the values of the gram matrix
# by dividing by the number of element in each feature maps.
return G.div(a * b * c * d)
class StyleLoss(nn.Module):
def __init__(self, target_feature):
super(StyleLoss, self).__init__()
self.target = gram_matrix(target_feature).detach()
def forward(self, input):
G = gram_matrix(input)
self.loss = F.mse_loss(G, self.target)
return input
6.模型构建
我们创建一个最小化风格和内容成本的成本函数。公式是:
![]()
我们来实现总成本函数,包括内容成本和风格成本。
默认的style_weight=1000000,content_weight=1,step=300,你可以在run_style_transfer函数中修改这些值。
from normalization import Normalization
from contentloss import ContentLoss
from styleloss import StyleLoss
import torch
import torch.nn as nn
import torch.optim as optim
import copy
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# desired depth layers to compute style/content losses :
content_layers_default = ['conv_4']
style_layers_default = ['conv_1', 'conv_2', 'conv_3', 'conv_4', 'conv_5']
def get_style_model_and_losses(cnn, normalization_mean, normalization_std,
style_img, content_img,
content_layers=content_layers_default,
style_layers=style_layers_default):
cnn = copy.deepcopy(cnn)
# normalization module
normalization = Normalization(normalization_mean, normalization_std).to(device)
# just in order to have an iterable access to or list of content/syle
# losses
content_losses = []
style_losses = []
# assuming that cnn is a nn.Sequential, so we make a new nn.Sequential
# to put in modules that are supposed to be activated sequentially
model = nn.Sequential(normalization)
i = 0 # increment every time we see a conv
for layer in cnn.children():
if isinstance(layer, nn.Conv2d):
i += 1
name = 'conv_{}'.format(i)
elif isinstance(layer, nn.ReLU):
name = 'relu_{}'.format(i)
# The in-place version doesn't play very nicely with the ContentLoss
# and StyleLoss we insert below. So we replace with out-of-place
# ones here.
layer = nn.ReLU(inplace=False)
elif isinstance(layer, nn.MaxPool2d):
name = 'pool_{}'.format(i)
elif isinstance(layer, nn.BatchNorm2d):
name = 'bn_{}'.format(i)
else:
raise RuntimeError('Unrecognized layer: {}'.format(layer.__class__.__name__))
model.add_module(name, layer)
if name in content_layers:
# add content loss:
target = model(content_img).detach()
content_loss = ContentLoss(target)
model.add_module("content_loss_{}".format(i), content_loss)
content_losses.append(content_loss)
if name in style_layers:
# add style loss:
target_feature = model(style_img).detach()
style_loss = StyleLoss(target_feature)
model.add_module("style_loss_{}".format(i), style_loss)
style_losses.append(style_loss)
# now we trim off the layers after the last content and style losses
for i in range(len(model) - 1, -1, -1):
if isinstance(model[i], ContentLoss) or isinstance(model[i], StyleLoss):
break
model = model[:(i + 1)]
return model, style_losses, content_losses
def get_input_optimizer(input_img):
# this line to show that input is a parameter that requires a gradient
optimizer = optim.LBFGS([input_img.requires_grad_()])
return optimizer
def run_style_transfer(cnn, normalization_mean, normalization_std,
content_img, style_img, input_img, num_steps=300,
style_weight=1000000, content_weight=1):
"""Run the style transfer."""
print('Building the style transfer model..')
model, style_losses, content_losses = get_style_model_and_losses(cnn,normalization_mean, normalization_std, style_img, content_img)
optimizer = get_input_optimizer(input_img)
print('Optimizing..')
run = [0]
while run[0] <= num_steps:
def closure():
# correct the values of updated input image
input_img.data.clamp_(0, 1)
optimizer.zero_grad()
model(input_img)
style_score = 0
content_score = 0
for sl in style_losses:
style_score += sl.loss
for cl in content_losses:
content_score += cl.loss
style_score *= style_weight
content_score *= content_weight
loss = style_score + content_score
loss.backward()
run[0] += 1
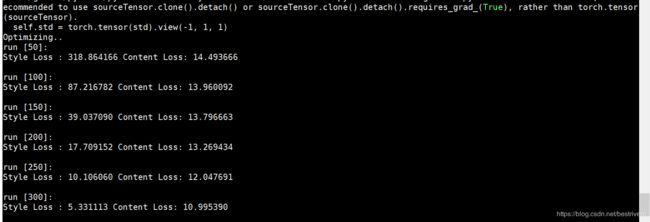
if run[0] % 50 == 0:
print("run {}:".format(run))
print('Style Loss : {:4f} Content Loss: {:4f}'.format(
style_score.item(), content_score.item()))
print()
return style_score + content_score
optimizer.step(closure)
# a last correction...
input_img.data.clamp_(0, 1)
return input_img
7.运行模型
这部分代码可以写到run.py里面,直接运行run.py即可。
from image_loader import load_image
from style_transfer import run_style_transfer
from load_vgg19 import cnn
import torch
from PIL import Image
import matplotlib.pyplot as plt
import torchvision.transforms as transforms
import os
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
cnn_normalization_mean = torch.tensor([0.485, 0.456, 0.406]).to(device)
cnn_normalization_std = torch.tensor([0.229, 0.224, 0.225]).to(device)
unloader = transforms.ToPILImage()
style_img = load_image("./images/style.jpg")
content_img = load_image("./images/content.jpg")
input_img = content_img.clone()
output = run_style_transfer(cnn, cnn_normalization_mean, cnn_normalization_std,
content_img, style_img, input_img)
image = output.cpu().clone() # we clone the tensor to not do changes on it
image = image.squeeze(0) # remove the fake batch dimension
image = unloader(image)
os.chdir('output')
image.save("output.png")模型运行成功的截图:
最终生成的output.png在output文件夹下。