slam学习之——stereoVision.cpp实践
在学习高博的slam时,用的是slambook2-master这个新仓库,在ch5/stereo这个工程运行时,做了一些更改;
工程包括如下内容(其中build是自己创建的)
根据安装依赖库的路径,对CMakeLists.txt做了些更改,更改后的内容如下:
find_package(Pangolin REQUIRED)
find_package(OpenCV 3.0 REQUIRED) # add by csq,由于我装了好几个版本的,所以这里指定个高版本的
include_directories(${OpenCV_INCLUDE_DIRS}) #add by csq
#添加Eigen头文件
include_directories("/usr/include/eigen3") #add by csq ,根据你的安装路径来选择
set(CMAKE_CXX_FLAGS "-std=c++11")
add_executable(stereoVision stereoVision.cpp)
target_link_libraries(stereoVision ${OpenCV_LIBS} ${Pangolin_LIBRARIES})stereoVision.cpp的代码分析如下:
#include
#include
#include
#include
#include
#include
//unistd.h为Linux/Unix系统中内置头文件,包含了许多系统服务的函数原型,例如read函数、write函数和getpid函数等。其作用相当于windows操作系统的"windows.h",是操作系统为用户提供的统一API接口,方便调用系统提供的一些服务。
using namespace std;
using namespace Eigen;
// 文件路径
string left_file = "./left.png";
string right_file = "./right.png";
// 在pangolin中画图,已写好,无需调整,定义绘制点云的函数,需要传入4维向量构成的点云集
void showPointCloud(
const vector> &pointcloud);
int main(int argc, char **argv) {
// 内参
double fx = 718.856, fy = 718.856, cx = 607.1928, cy = 185.2157;
// 基线 (就是两个相机光轴间的距离,单位是m)
double b = 0.573;
// 读取图像(以灰度图形式)
cv::Mat left = cv::imread(left_file, 0);
cv::Mat right = cv::imread(right_file, 0);
cv::Ptr sgbm = cv::StereoSGBM::create( //SGBM是立体匹配算法中的半全局块匹配,得到的视差图相比于BM算法来说,减少了很多不准确的匹配点,尤其是在深度不连续区域,速度上SGBM要慢于BM算法;
0, 96, 9, 8 * 9 * 9, 32 * 9 * 9, 1, 63, 10, 100, 32); // 神奇的参数
cv::Mat disparity_sgbm, disparity;
sgbm->compute(left, right, disparity_sgbm); //由左右视图按照SGBM匹配方式计算得到视差图
disparity_sgbm.convertTo(disparity, CV_32F, 1.0 / 16.0f); //将16位符号整形的视差Mat转换为32位浮点型Mat
//生成点云
vector> pointcloud; //定义4维形式的点云向量容器
// 如果你的机器慢,请把后面的v++和u++改成v+=2, u+=2
for (int v = 0; v < left.rows; v++) //遍历左视图
for (int u = 0; u < left.cols; u++) {
if (disparity.at(v, u) <= 0.0 || disparity.at(v, u) >= 96.0) continue;
Vector4d point(0, 0, 0, left.at(v, u) / 255.0); // 前3维为xyz,第4维为归一化后的强度值
// 根据双目模型计算point的位置,计算的是左视图点的相机位置
double x = (u - cx) / fx; //该公式计算的是归一化在相机Zc=1平面的相机坐标
double y = (v - cy) / fy;
double depth = fx * b / (disparity.at(v, u)); //由视差,双目的基计算像素点对应的实际距离(深度信息)
point[0] = x * depth; //由深度信息获取真实相机坐标系下的Xc
point[1] = y * depth; //由深度信息获取真实相机坐标系下的Yc
point[2] = depth; //相机坐标系下的Zc
pointcloud.push_back(point); //获得的是相机坐标系下的点云位置
}
cv::imshow("disparity", disparity / 96.0); //把视差值限定在0-96
cv::waitKey(0);
// 画出点云
showPointCloud(pointcloud);
return 0;
}
void showPointCloud(const vector> &pointcloud) {
if (pointcloud.empty()) { //确保点云容器非空
cerr << "Point cloud is empty!" << endl;
return;
}
pangolin::CreateWindowAndBind("Point Cloud Viewer", 1024, 768);
glEnable(GL_DEPTH_TEST);
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000), //相机参数
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0) //观测视角
);
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
while (pangolin::ShouldQuit() == false) {
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
d_cam.Activate(s_cam);
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);
glPointSize(2);
glBegin(GL_POINTS);
for (auto &p: pointcloud) {
glColor3f(p[3], p[3], p[3]); //点的颜色
glVertex3d(p[0], p[1], p[2]); //点的相机坐标
}
glEnd();
pangolin::FinishFrame();
usleep(5000); // sleep 5 ms
}
return;
} 其中stereoSGBM的函数和参数说明如下:
static Ptr cv::StereoSGBM::create (int minDisparity = 0,
int numDisparities = 16,
int blockSize = 3,
int P1 = 0,
int P2 = 0,
int disp12MaxDiff = 0,
int preFilterCap = 0,
int uniquenessRatio = 0,
int speckleWindowSize = 0,
int speckleRange = 0,
int mode = StereoSGBM::MODE_SGBM
)
- minDisparity:最小的视差值。
- numDisparity:视差范围,即最大视差值和最小视差值之差,必须是16的倍数。
- blockSize:匹配块大小(SADWindowSize),必须是大于等于1的奇数,一般为3~11 。
- P1,P2:惩罚系数,一般:P1=8*通道数*SADWindowSize*SADWindowSize,P2=4*P1
- disp12MaxDiff :左右视差图的最大容许差异(超过将被清零),默认为 -1,即不执行左右视差检查。
- preFilterCap:预滤波图像像素的截断值。该算法首先计算每个像素的x导数,并通过[-preFilterCap,preFilterCap]间隔剪切其值。结果值被传递给Birchfield-Tomasi像素成本函数。
- uniquenessRatio:视差唯一性百分比, 视差窗口范围内最低代价是次低代价的(1 + uniquenessRatio/100)倍时,最低代价对应的视差值才是该像素点的视差,否则该像素点的视差为 0,通常为5~15.
- speckleRange:视差变化阈值。
- mode:模式
实践运行步骤如下,
#终端切到工程目录下
cd /home/chensq/Downloads/slambook2-master/ch5/stereo
#创建build并cd
mkdir build
cd build
#编译
cmake ..
make

在build中生成了个stereoVision的执行文件,将左右图像拷贝进来做测试

原图如下:

运行
./stereoVision
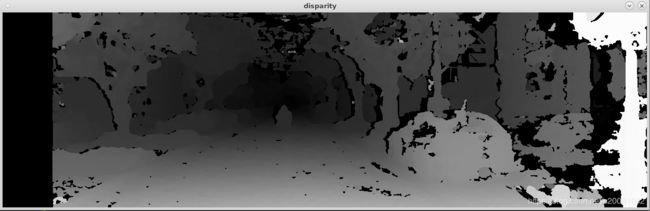
测试结果如下:
视差图结果
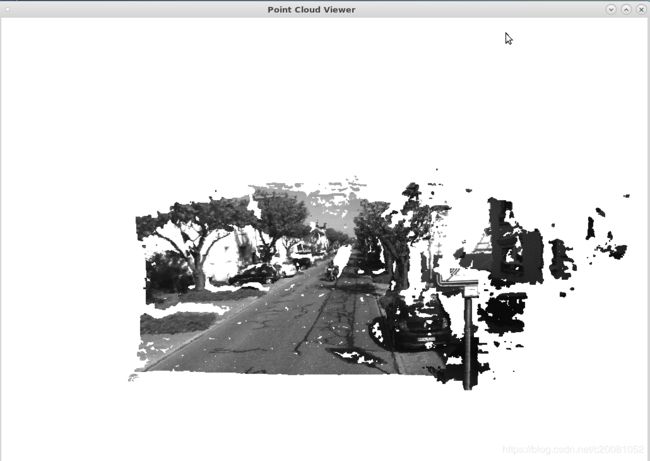
点云图如下
参考:
半全局块匹配(Semi-Global Block Matching)算法