Cocos2d-x 寻路算法之一 距离优先
1.效果图
寻路这块在游戏中一直很重要,花了点时间研究了下这个问题,主要参考的是《Data Structures For Game Programmers》,其他的算法用普通Console演示就行了,寻路算法还是用一个界面比较好,最近在学Cocos2d-x,就用它了。用到Cocos2d-x中的基本画线段,画矩形就行了,还有简单的sprite拖动。这demo建了一个线条类,继承CCNode,重写draw方法就行了。在draw方法中简单地调用ccDrawColor4F函数来设置颜色,ccDrawLine来画线条,非常容易,cocos2d-x这些函数封装了opengles中的原始函数,使用非常简单。sprite拖动可以参考这篇文章《cocos2d-x Touch 事件应用的一个例子 》
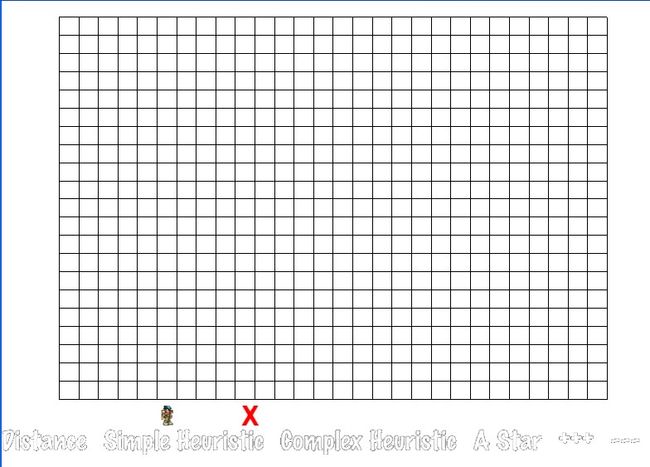
1.小人和红色X都可以用鼠标移动,移到上面的地图上,表示寻路起点和终点。
2.Distance, Simple Heuristic, Complex Heuristic, A Star分别是4种寻路算法,点击程序就会开始演示寻路过程。
3.地图的格子点击会加深颜色,总共4个等级,白,灰,深灰,黑,表示该格子的通过难度,白色是1,灰是2,深灰是3,黑色是不可通过区域。
4."+++"表示加快演示速度,"---"表示降低演示速度。
2. Breadth - First Search算法
顾名思义,有点像呼吸,一层层地扩展开来,这个时候队列(Queue),stl中的deque就派上用场了。deque不懂可以参考这篇文章《C++ Queue Example Rearranging RailRoad Cars》
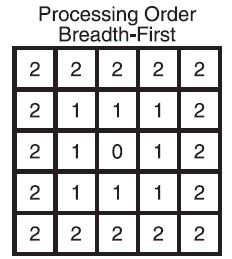
起点在中心,会先访问它的第一个外圈,再是第二个。现在我觉得它更像一颗石头扔在水面上的效果。
下面是伪代码:
BreadthFirst( Node )
Queue.Enqueue( Node )Mark( Node )
While( Queue.IsNotEmpty )
Process( Queue.Front )
For Each Child of Queue.Front
if NotMarked( Child )
Queue.Enqueue( Child )
Mark( Child )
end if
end For
Queue.Dequeue()
End While
End Function
遍历一个树或者图都可以用这个方法。在我们这里遇到了点麻烦,因为我们都知道斜角的距离是根号2的倍数,要比上下左右方向远,因为寻路,很重要的因素的距离的长短。我们需要考虑距离这个因素了。
3.Distance - First Search
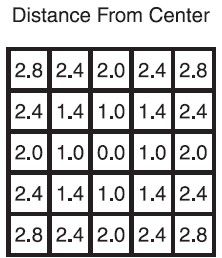
起点还在中心,这张图显示了每一格到中心的估算距离。如果依靠距离优先的算法,下图是寻路次序:

所以我们定义了一个方向数组:
const int DIRECTION[8][2]={
{0,1}, //north
{1,0}, //east
{0,-1}, //south
{-1,0}, //west
{1,1}, //northeast
{1,-1}, //southeast
{-1,-1}, //southwest
{-1,1} //northwest
};
这样通过一个for循环,就可以访问它周围一圈的格子了,而且是按照距离优先了,上下左右优先,斜角次些。
因为是地图,我们这里简单定义了一个2维数组,非常简单用一个vector就可以模拟了,假定读者熟悉stl中的vector和C++中的template,不熟悉可以参考这篇文章《STL Vector》和《C++ 基础之 "模版函数","类模版"》
#ifndef ARRAY2D_H
#define ARRAY2D_H
#include
using namespace std;
template
class Array2D{
public:
Array2D(int p_width, int p_height):m_array(p_width * p_height),
m_width(p_width),m_height(p_height){
}
Datatype* Get(int p_x, int p_y)const{
return m_array[p_y * m_width + p_x];
}
void Set(int p_x, int p_y, Datatype* data){
m_array[p_y * m_width + p_x] = data;
}
int Size() const{
return m_width * m_height;
}
int Width() const{
return m_width;
}
int Height()const{
return m_height;
}
private:
vector m_array;
int m_width;
int m_height;
};
#endif 我们还定义了一个Cell类表示每一个格子:它有很多属性,像位置,最短距离到这个Cell的Cell的位置,是否已经处理过,到起点的距离,是否可以通过,还有就是这个Cell的权重,表示经过难度。我们这里使用了一个从cocos2d-x中拷来的宏,这样get和set方法就不用手写了。
#ifndef _CELL_H
#define _CELL_H
#define SYNTHESIZE(varType, varName, funName)\
protected: varType varName;\
public: virtual varType get##funName(void) const { return varName; }\
public: virtual void set##funName(varType var){ varName = var; }
class Cell{
public:
Cell():_marked(false),_distance(0),_lastX(-1),_lastY(-1),
_x(-1),_y(-1),_passable(true),_weight(1),_drawProgress(false){
}
SYNTHESIZE(int, _x, X); //start at left bottom
SYNTHESIZE(int, _y, Y); //start at left bottom
SYNTHESIZE(int, _lastX, LastX); //store the nearest cell's location related this cell
SYNTHESIZE(int, _lastY, LastY); //store the nearest cell's location related this cell
SYNTHESIZE(bool, _marked, Marked); //whether this cell process or not
SYNTHESIZE(float, _distance, Distance); //distance between this cell and start
SYNTHESIZE(bool, _passable, Passable); //whether this call can pass
SYNTHESIZE(int, _drawProgress, DrawProgress); //just for draw the path finding progress
inline void setWeight(int weight){
if(weight > 4){
_weight = 1;
}else{
_weight = weight;
setPassable(weight == 4 ? false : true);
}
}
inline int getWeight()const{ return _weight;}
private:
int _weight; //default is 1, 4 means this cell is impassable.
//distance have relationship with weight
};
#endif核心算法如下:事先需要了解的知识:因为我们需要按照最短距离优先寻路,所以一个优先队列就需要了,这里简单地使用了heap,对heap不了解的可以看下这篇文章《HeapSort(堆排序 C++) 》,下面还用上了C++中的函数指针,可以参考这篇文章《C++ 函数指针 函数名作为参数 》,为什么要用函数指针呢?看完整个寻路算法系列你就知道了。
语言解释:
先把起点Cell加入到heap中,对这个Cell的周围8个Cell进行处理,主要是更新他们到起点的距离和记录最短距离到这个Cell的Cell的位置。每次找到一个新的Cell,
1.如果还没处理过,标上处理过标志,更新他们到起点的距离和记录最短距离到这个Cell的Cell的位置,再把这个Cell加入到堆中,重新形成一个堆,这样开始很容易得到离起点最近的点。
2.如果处理过,看下新的距离是不是比老的距离短,如果短,更新上面的提到的两点。
不断处理,直到访问了所有的点或者找到终点了。
下面是代码:整个寻路算法的核心代码。
typedef bool (*compareTwoCells)(Cell *c1, Cell *c2);
bool compareTwoCellsByDistance(Cell *c1, Cell *c2){
if(c1->getDistance() <= c2->getDistance()){
return false;
}else{
return true;
}
}
void HelloWorld::startPathFinding(compareTwoCells compareMethod, int startX,int startY,int goalX,int goalY){
Cell *startCell = _m_Map.Get(startX, startY);
vector vecCells;
vecCells.push_back(startCell);
make_heap(vecCells.begin(),vecCells.end(),compareMethod);
startCell->setMarked(true);
Cell *nowProcessCell;
while(vecCells.size() != 0){
pop_heap(vecCells.begin(),vecCells.end(),compareMethod);
nowProcessCell = vecCells.back();
vecCells.pop_back();
if(nowProcessCell->getX() == _goalX && nowProcessCell->getY() == _goalY){//the goal is reach
return;
}
for(int i = 0; i < 8; ++i){ //check eight direction
int indexX = nowProcessCell->getX() + DIRECTION[i][0];
int indexY = nowProcessCell->getY() + DIRECTION[i][1];
if(indexX >= 0 && indexX < xLineCount && indexY >= 0 && indexY < yLineCount
&& _m_Map.Get(indexX,indexY)->getPassable() == true){//check is a OK cell or not
Cell *cell = _m_Map.Get(indexX,indexY);
float beforeDistance = DISTANCE[i] * cell->getWeight() + _m_Map.Get(nowProcessCell->getX(),
nowProcessCell->getY())->getDistance();//calculate the distance
if(cell->getMarked() == false){
cell->setMarked(true);
cell->setLastX(nowProcessCell->getX());
cell->setLastY(nowProcessCell->getY());
cell->setDistance(beforeDistance);
vecCells.push_back(cell);//only push the unmarked cell into the vector
push_heap(vecCells.begin(),vecCells.end(),compareMethod);
}else{// if find a lower distance, update it
if(beforeDistance < cell->getDistance()){
cell->setDistance(beforeDistance);
cell->setLastX(nowProcessCell->getX());
cell->setLastY(nowProcessCell->getY());
make_heap(vecCells.begin(),vecCells.end(),compareMethod);//distance change,so make heap again
}
}
}
}
}
}
startPathFinding(compareTwoCellsByDistance,_playerX,_playerY,_goalX,_goalY);//demo
4.寻路动态图:
我只是简单地在起点和终点间加入了一个不可通过的墙,通过查看蓝色的区域会发现这个算法很慢。目标在右边,这个算法上下左右都找,虽然找到了也太浪费资源了吧?下篇我们来看看其他的寻路算法。
5.项目下载:
(请用7z解压,开发工具vs2010)
http://www.waitingfy.com/?attachment_id=828
A*算法应用可以看下这篇文章《贪吃蛇 AI 的实现 snake AI》