WebRTC之语音活动检测(VAD)算法
原文转载于:http://blog.csdn.net/shichaog/article/details/52399354 非常感谢。
VAD(Voice Activity Detection)算法的作用是检测语音,在远场语音交互场景中,VAD面临着两个难题:
1. 如何成功检测到最低能量的语音(灵敏度)。2. 如何在多噪环境下成功检测(漏检率和虚检率)。
漏检反应的是原本是语音但是没有检测出来,而虚检率反应的是不是语音信号而被检测成语音信号的概率。相对而言漏检是不可接受的,而虚检可以通过后端的ASR和NLP算法进一步过滤,但是虚检会带来系统资源利用率上升,随之系统的功耗和发热会进一步增加,而这会上升为可移动和随声携带设备的一个难题。
本文基于WebRTC的AEC算法,WebRTC的VAD模型采用了高斯模型,这一模型应用极其广泛。
高斯分布
高斯分布又称为正态分布(Normal distribution/Gaussian distribution)。
若随机变量X服从一个数学期望为μ,标准差为σ^2的高斯分布,则:
X~N(μ,σ^2)
其概率密度函数为:
f(x)=1/(√2π σ) e^(-〖(x-u)〗^2/(2σ^2 ))
高斯在webRTC中的使用:
f(x_k |Z,r_k)=1/√2π e^(-(x_k-u_z )^2/(2σ^2 ))
x_k是选取的特征向量,webRTC中指x_k是六个子带的能量(子带是80~250Hz,250~500Hz,500Hz~1K, 1~2K,2~3K,3~4KHz,变量feature_vector存放的就是子带能量序列),r_k是均值u_z和方差σ的参数结合,这两个参数决定了高斯分布的概率。Z=0情况是计算噪声的概率,Z=1是计算是语音的概率。
这里采用最高频率是4KHz的原因是,webRTC中程序将输入(48KHz,32HKz,16KHz)都下采样到8KHz,这样根据奎斯特频率定理,有用的频谱就是4KHz以下。
当然也可以采用8KHz截止频率,这样就需要自己训练和修改高斯模型的参数了,这个算法我试过,要比基于DNN的方法好用,灵活性大些,体现在参数自适应更新上,举例来说,在夜晚安静家庭场景中,噪声的均值就比较低的,白天周边环境噪声多了时,噪声特征的均值也会随之调整,针对DNN的方法,参数一旦训练完毕,那么适用的场景的就定了,如果要增大适用场景,首先要收集目标场景的数据,标注好的数据重新训练(通常要增加参数数量),这样的过程会导致1.数据收集成本高,2.参数过多计算代价大(VAD一般是一直工作的)。
Webrtc采用的是GMM模型
等待视频链接地址。
WebRTC算法流程
1. 设置VAD激进模式
共四种模式,用数字0~3来区分,激进程度与数值大小正相关。
0: Normal,1:low Bitrate, 2:Aggressive;3:Very Aggressive
这些激进模式是和以下参数是息息相关的。
-
- // Mode 0, Quality.
- static const int16_t kOverHangMax1Q[3] = { 8, 4, 3 };
- static const int16_t kOverHangMax2Q[3] = { 14, 7, 5 };
- static const int16_t kLocalThresholdQ[3] = { 24, 21, 24 };
- static const int16_t kGlobalThresholdQ[3] = { 57, 48, 57 };
- // Mode 1, Low bitrate.
- static const int16_t kOverHangMax1LBR[3] = { 8, 4, 3 };
- static const int16_t kOverHangMax2LBR[3] = { 14, 7, 5 };
- static const int16_t kLocalThresholdLBR[3] = { 37, 32, 37 };
- static const int16_t kGlobalThresholdLBR[3] = { 100, 80, 100 };
- // Mode 2, Aggressive.
- static const int16_t kOverHangMax1AGG[3] = { 6, 3, 2 };
- static const int16_t kOverHangMax2AGG[3] = { 9, 5, 3 };
- static const int16_t kLocalThresholdAGG[3] = { 82, 78, 82 };
- static const int16_t kGlobalThresholdAGG[3] = { 285, 260, 285 };
- // Mode 3, Very aggressive.
- static const int16_t kOverHangMax1VAG[3] = { 6, 3, 2 };
- static const int16_t kOverHangMax2VAG[3] = { 9, 5, 3 };
- static const int16_t kLocalThresholdVAG[3] = { 94, 94, 94 };
- static const int16_t kGlobalThresholdVAG[3] = { 1100, 1050, 1100 };
2. 帧长设置
A) 共有三种帧长可以用到,分别是80/10ms,160/20ms,240/30ms,实际上目前只支持10ms的帧长。
B) 其它采样率的48k,32k,24k,16k会重采样到8k来计算VAD。
之所以选择上述三种帧长度,是因为语音信号是短时平稳信号,其在10ms~30ms之间可看成平稳信号,高斯马尔科夫等信号处理方法基于的前提是信号是平稳的,在10ms~30ms,平稳信号处理方法是可以使用的。
3. 高斯模型中特征向量选取
在WebRTC的VAD算法中用到了聚类的思想,只有两个类,一个类是语音,一个类是噪声,对每帧信号都求其是语音和噪声的概率,根据概率进行聚类,当然为了避免一帧带来的误差也有一个统计量判决在算法里,那么问题来了,选择什么样的特征作为高斯分布的输入呢?这关系到聚类结果的准确性,也即VAD性能,毋庸置疑,既然VAD目的是区分噪声和语音,那么噪声信号和语音信号这两种信号它们的什么特征相差最大呢?选择特征相差比较大自然能得到比较好的区分度。
众所周知,信号的处理分类主要有时域,频域和空域,从空域上看,webRTC的VAD是基于单麦克的,噪声和语音没有空间区分度的概念,在多麦克风场景,确实基于多麦克风的VAD算法,从时域上看,而者都是时变信号,且短时信号变化率比较小,所以推算来推算去只有频域的区分度可能是比较好的。

汽车噪声频谱

粉红噪声频谱

白噪声频谱

语音声谱
从以上四个图中,可以看到从频谱来看噪声和语音,它们的频谱差异还是比较大,且以一个个波峰和波谷的形式呈现。
WebRTC正式基于这一假设,将频谱分成了6个子带。它们是:
80Hz~250Hz,250Hz~500Hz,500Hz~1K,1K~2K,2K~3K,3K~4K。分别对应于feature[0],feature[1],feature[2],...,feature[5]。
可以看到以1KHz为分界,向下500HZ,250Hz以及170HZ三个段,向上也有三个段,每个段是1KHz,这一频段涵盖了语音中绝大部分的信号能量,且能量越大的子带的区分度越细致。
我国交流电标准是220V~50Hz,电源50Hz的干扰会混入麦克风采集到的数据中且物理震动也会带来影响,所以取了80Hz以上的信号。
在webRTC计算的函数在filter_bank.c文件中,前面说的基于激活的DNN也可以是基于fbank特征。
高通滤波器设计
高通滤波器的作用有两点:1.滤除直流分量,2提升高频成分(人耳对3.5KHz最为敏感)
- // High pass filtering, with a cut-off frequency at 80 Hz, if the |data_in| is
- // sampled at 500 Hz.
- //
- // - data_in [i] : Input audio data sampled at 500 Hz.
- // - data_length [i] : Length of input and output data.
- // - filter_state [i/o] : State of the filter.
- // - data_out [o] : Output audio data in the frequency interval
- // 80 - 250 Hz.
- static void HighPassFilter(const int16_t* data_in, size_t data_length,
- int16_t* filter_state, int16_t* data_out) {
- size_t i;
- const int16_t* in_ptr = data_in;
- int16_t* out_ptr = data_out;
- int32_t tmp32 = 0;
- // The sum of the absolute values of the impulse response:
- // The zero/pole-filter has a max amplification of a single sample of: 1.4546
- // Impulse response: 0.4047 -0.6179 -0.0266 0.1993 0.1035 -0.0194
- // The all-zero section has a max amplification of a single sample of: 1.6189
- // Impulse response: 0.4047 -0.8094 0.4047 0 0 0
- // The all-pole section has a max amplification of a single sample of: 1.9931
- // Impulse response: 1.0000 0.4734 -0.1189 -0.2187 -0.0627 0.04532
- for (i = 0; i < data_length; i++) {
- // All-zero section (filter coefficients in Q14).
- tmp32 = kHpZeroCoefs[0] * *in_ptr;
- tmp32 += kHpZeroCoefs[1] * filter_state[0];
- tmp32 += kHpZeroCoefs[2] * filter_state[1];
- filter_state[1] = filter_state[0];
- filter_state[0] = *in_ptr++;
- // All-pole section (filter coefficients in Q14).
- tmp32 -= kHpPoleCoefs[1] * filter_state[2];
- tmp32 -= kHpPoleCoefs[2] * filter_state[3];
- filter_state[3] = filter_state[2];
- filter_state[2] = (int16_t) (tmp32 >> 14);
- *out_ptr++ = filter_state[2];
- }
- }
1. 定点数计算,指两个方面,一是滤波系数量化,而是计算过程的定点化,高斯模型计算也使用了这一技巧。
2. 舍入技巧,减少运算量。
下面就来看看,这些技巧是如何使用的,首先根据代码的注释可以看出,
全零点和全极点脉冲响应的实际上是浮点数,它们脉冲响应分别是:
0.4047 -0.8094 0.4047 0 0 0
1.0000 0.4734 -0.1189 -0.2187 -0.0627 0.04532
所以可见应该是六阶方程,但是超过3阶后,零点全零,极点数值较小,这时适当增大第三个数值,达到减少计算次数的目的。
量化是按照2的十四次方进行定点化。这是因为最差情况下,零极点的放大倍数不超过两倍,所以16位数可以表示的下来。其零极点绘图如下:

对这两个图的解释就忽略了,能够看懂上述代码和两张图的意义,就可以更改滤波器的特性了,对不要相位信息的,采用IIR比FIR达到相同的增益平坦度需要的阶数要少。关于高通滤波器的设计还有疑问的可以留言共同交流。频响如下:

WebRtcVad_CalculateFeatures函数计算每个子带的能量。能量结果存放在features数组里,然后调用GmmProbability计算概率。
- int WebRtcVad_CalcVad8khz(VadInstT* inst, const int16_t* speech_frame,
- size_t frame_length)
- {
- int16_t feature_vector[kNumChannels], total_power;
- // Get power in the bands
- total_power = WebRtcVad_CalculateFeatures(inst, speech_frame, frame_length,
- feature_vector);
- // Make a VAD
- inst->vad = GmmProbability(inst, feature_vector, total_power, frame_length);
- return inst->vad;
- }
计算流程
高斯模型有两个参数H0和H1,它们分表示的是噪声和语音,判决测试使用LRT(likelihood ratio test)。分为全局和局部两种情况。

a)高斯概率计算采用的高斯公式如下:
这里其实采用了两个参数高斯分布,但是假设了这两个参数是相互独立的:

这里要做个简化以减少计算量。将这两个高斯看成是不相关的,

这里可以看到做了三个简化,第一个是把指数前的系数省掉了,这是因为在做似然比检验时,可以消掉,第二个简化是假设这两个高斯分布是不相关的,第三个简化是将乘法近似化简成加法。使用高斯分布这个在kaldi中也有例子,kaldi中基于GMM的语言模型分成三种,第一种是类似这里的独立同分布模型,第二种是互相关对角阵元素非零,第三种是全高斯互相关模型。
用多个高斯来近似一个语音包络这种方法,在插值时也用到,即用多个sinc函数进行分数位插值。
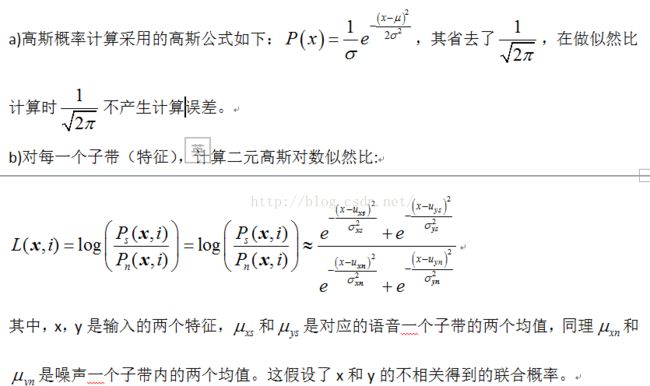
c)对数似然比,分为全局和局部,全局是六个子带之加权之和,而局部是指每一个子带则是局部,所以语音判决会先判断子带,子带判断没有时会判断全局,只要有一方过了,就算有语音,公式表达如下:

后记:
和判决准则相关的参数在vad_core.c文件,他们是:
- // Spectrum Weighting
- static const int16_t kSpectrumWeight[kNumChannels] = { 6, 8, 10, 12, 14, 16 };
- static const int16_t kNoiseUpdateConst = 655; // Q15
- static const int16_t kSpeechUpdateConst = 6554; // Q15
- static const int16_t kBackEta = 154; // Q8
- // Minimum difference between the two models, Q5
- static const int16_t kMinimumDifference[kNumChannels] = {
- 544, 544, 576, 576, 576, 576 };
- // Upper limit of mean value for speech model, Q7
- static const int16_t kMaximumSpeech[kNumChannels] = {
- 11392, 11392, 11520, 11520, 11520, 11520 };
- // Minimum value for mean value
- static const int16_t kMinimumMean[kNumGaussians] = { 640, 768 };
- // Upper limit of mean value for noise model, Q7
- static const int16_t kMaximumNoise[kNumChannels] = {
- 9216, 9088, 8960, 8832, 8704, 8576 };
- // Start values for the Gaussian models, Q7
- // Weights for the two Gaussians for the six channels (noise)
- static const int16_t kNoiseDataWeights[kTableSize] = {
- 34, 62, 72, 66, 53, 25, 94, 66, 56, 62, 75, 103 };
- // Weights for the two Gaussians for the six channels (speech)
- static const int16_t kSpeechDataWeights[kTableSize] = {
- 48, 82, 45, 87, 50, 47, 80, 46, 83, 41, 78, 81 };
- // Means for the two Gaussians for the six channels (noise)
- static const int16_t kNoiseDataMeans[kTableSize] = {
- 6738, 4892, 7065, 6715, 6771, 3369, 7646, 3863, 7820, 7266, 5020, 4362 };
- // Means for the two Gaussians for the six channels (speech)
- static const int16_t kSpeechDataMeans[kTableSize] = {
- 8306, 10085, 10078, 11823, 11843, 6309, 9473, 9571, 10879, 7581, 8180, 7483
- };
- // Stds for the two Gaussians for the six channels (noise)
- static const int16_t kNoiseDataStds[kTableSize] = {
- 378, 1064, 493, 582, 688, 593, 474, 697, 475, 688, 421, 455 };
- // Stds for the two Gaussians for the six channels (speech)
- static const int16_t kSpeechDataStds[kTableSize] = {
- 555, 505, 567, 524, 585, 1231, 509, 828, 492, 1540, 1079, 850 };
参数更新
噪声均值更新,WebRtcVad_FindMinimum函数对每个特征,求出100个帧里头的前16个最小值。每个最小值都对应一个age,最大不超过100,超过100则失效,用这个最小值来跟新噪声。
![]()
模型参数跟新
跟新噪声均值,语音均值,噪声方差,语音方差,自适应也就体现在这里。
噪声跟新:只在非语音帧进行跟新,

另外:
现在也有基于DNN方法的进行VAD检测的,简单的检测使用两层LSTM外交BN(batch normalization)就可以实现这个功能。