YOLO v3 PyTorch版本源码解读(二):数据集的读取以及网络的训练
PyTorch 代码链接:https://github.com/ultralytics/yolov3
本篇主要是对代码文件中 原始数据读取方式 的解读,集中分析了 utils 文件夹下的 datasets.py函数。并分析了损失函数的组成、mAP的计算。
1. datasets.py
1.1 letterbox函数
我们知道 yolo v3是支持任意尺寸的图片输入的,但我们定义的网络结构是输入尺寸是固定的,所以在读取 原始图片时肯定是做了一些处理的,将原始图片的尺寸统一转换为我们定义的网络输入尺寸如416等。
比如输入尺寸是416416,但原图是按照纵横比例缩放至416416的, 取 min(w/img_w, h/img_h)这个比例来缩放,保证长的边缩放为需要的输入尺寸416,而短边按比例缩放不会扭曲,img_w,img_h是原图尺寸768,576, 缩放后的尺寸为new_w, new_h=416,312,需要的输入尺寸是w,h=416416.如下图所示:
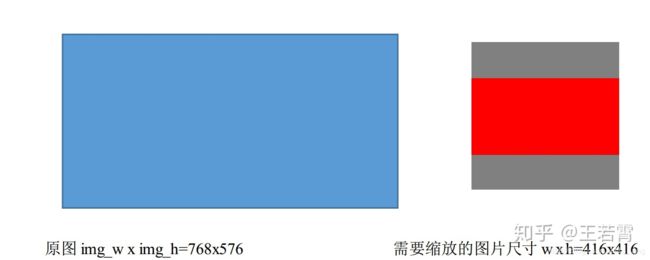
剩下的灰色区域用(128,128,128)填充即可构造为416416。这部分的代码对应datasets.py中的letterbox函数。
def letterbox(img, new_shape=416, color=(128, 128, 128), mode='auto'):
# Resize a rectangular image to a 32 pixel multiple rectangle
# https://github.com/ultralytics/yolov3/issues/232
shape = img.shape[:2] # current shape [height, width]
# 按长边缩放,不足 new_shape * new_shape 的部分用128填充
if isinstance(new_shape, int):
ratio = float(new_shape) / max(shape)
else:
ratio = max(new_shape) / max(shape) # ratio = new / old
# 缩放比例
ratiow, ratioh = ratio, ratio
# 缩放之后未填充的 高和宽
new_unpad = (int(round(shape[1] * ratio)), int(round(shape[0] * ratio)))
# Compute padding https://github.com/ultralytics/yolov3/issues/232
if mode is 'auto': # minimum rectangle
dw = np.mod(new_shape - new_unpad[0], 32) / 2 # width padding
dh = np.mod(new_shape - new_unpad[1], 32) / 2 # height padding
elif mode is 'square': # square
dw = (new_shape - new_unpad[0]) / 2 # width padding
dh = (new_shape - new_unpad[1]) / 2 # height padding
elif mode is 'rect': # square
dw = (new_shape[1] - new_unpad[0]) / 2 # width padding
dh = (new_shape[0] - new_unpad[1]) / 2 # height padding
elif mode is 'scaleFill':
dw, dh = 0.0, 0.0
new_unpad = (new_shape, new_shape)
ratiow, ratioh = new_shape / shape[1], new_shape / shape[0]
if shape[::-1] != new_unpad:
img = cv2.resize(img, new_unpad, interpolation=cv2.INTER_AREA) # resize
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
img = cv2.copyMakeBorder(img, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
return img, ratiow, ratioh, dw, dh
1.2. LoadImagesAndLabels类
这个类很长,我们重点看一下对 原始图片的读取中调用了上面的letterbox函数,然后根据letterbox中的缩放系数以及填充情况对 新图片标签中的 x1y1x2y2 做了修正,接着 利用xyxy2xywh函数将 “左上角右下角表示bounding box” 的方法转换为了 “中心点和宽高表示”,接着对 x、y、w、h均除以了 bounding box的宽,做了归一化处理。这是为了之后训练时loss数值维度上的统一。可以看到的是之后在 训练过程中使用的真实标签中的 w,h 就是归一化之后的 w和h,而 x,y 则是通过gxy=(x,y)*ng, gxy -= gxy.floor() 来计算得到,这个在utils.py中的build_targets函数中可以看到。
class LoadImagesAndLabels(Dataset): # for training/testing
def __init__(self, path, img_size=416, batch_size=16, augment=False, hyp=None, rect=False, image_weights=False):
with open(path, 'r') as f:
self.img_files = [x for x in f.read().splitlines() if os.path.splitext(x)[-1].lower() in img_formats]
n = len(self.img_files) # n = 64
# print("n= ", n, batch_size)
bi = np.floor(np.arange(n) / batch_size).astype(np.int) # batch index
nb = bi[-1] + 1 # number of batches # nb = 4
assert n > 0, 'No images found in %s' % path
self.n = n
self.batch = bi # batch index of image
self.img_size = img_size
self.augment = augment
self.hyp = hyp
self.image_weights = image_weights
self.rect = False if image_weights else rect
# Define labels, 将self.img_files里 images 文件夹下面的 .jpg 全部换成 .txt作为标签地址
self.label_files = [x.replace('images', 'labels').replace(os.path.splitext(x)[-1], '.txt')
for x in self.img_files]
# Rectangular Training https://github.com/ultralytics/yolov3/issues/232
if self.rect:
print("self.rect is Ture")
# Read image shapes
sp = 'data' + os.sep + path.replace('.txt', '.shapes').split(os.sep)[-1] # shapefile path
try:
with open(sp, 'r') as f: # read existing shapefile
s = [x.split() for x in f.read().splitlines()]
assert len(s) == n, 'Shapefile out of sync'
except:
s = [exif_size(Image.open(f)) for f in tqdm(self.img_files, desc='Reading image shapes')]
np.savetxt(sp, s, fmt='%g') # overwrites existing (if any)
# Sort by aspect ratio
s = np.array(s, dtype=np.float64)
ar = s[:, 1] / s[:, 0] # aspect ratio
i = ar.argsort()
self.img_files = [self.img_files[i] for i in i]
self.label_files = [self.label_files[i] for i in i]
ar = ar[i]
# Set training image shapes
shapes = [[1, 1]] * nb
for i in range(nb):
ari = ar[bi == i]
mini, maxi = ari.min(), ari.max()
if maxi < 1:
shapes[i] = [maxi, 1]
elif mini > 1:
shapes[i] = [1, 1 / mini]
self.batch_shapes = np.ceil(np.array(shapes) * img_size / 32.).astype(np.int) * 32
# Preload labels (required for weighted CE training)
self.imgs = [None] * n
self.labels = [None] * n
preload_labels = False
if preload_labels:
print("preload_labels is Ture")
self.labels = [np.zeros((0, 5))] * n
iter = tqdm(self.label_files, desc='Reading labels') if n > 10 else self.label_files
extract_bounding_boxes = False
for i, file in enumerate(iter):
try:
with open(file, 'r') as f:
l = np.array([x.split() for x in f.read().splitlines()], dtype=np.float32)
if l.shape[0]:
assert l.shape[1] == 5, '> 5 label columns: %s' % file
assert (l >= 0).all(), 'negative labels: %s' % file
assert (l[:, 1:] <= 1).all(), 'non-normalized or out of bounds coordinate labels: %s' % file
self.labels[i] = l
# Extract object detection boxes for a second stage classifier
if extract_bounding_boxes:
p = Path(self.img_files[i])
img = cv2.imread(str(p))
h, w, _ = img.shape
for j, x in enumerate(l):
f = '%s%sclassification%s%g_%g_%s' % (
p.parent.parent, os.sep, os.sep, x[0], j, p.name)
if not os.path.exists(Path(f).parent):
os.makedirs(Path(f).parent) # make new output folder
box = xywh2xyxy(x[1:].reshape(-1, 4)).ravel()
box = np.clip(box, 0, 1) # clip boxes outside of image
result = cv2.imwrite(f, img[int(box[1] * h):int(box[3] * h),
int(box[0] * w):int(box[2] * w)])
if not result:
print('stop')
except:
pass # print('Warning: missing labels for %s' % self.img_files[i]) # missing label file
assert len(np.concatenate(self.labels, 0)) > 0, 'No labels found. Incorrect label paths provided.'
# Detect corrupted images https://medium.com/joelthchao/programmatically-detect-corrupted-image-8c1b2006c3d3
detect_corrupted_images = False
if detect_corrupted_images:
from skimage import io # conda install -c conda-forge scikit-image
for file in tqdm(self.img_files, desc='Detecting corrupted images'):
try:
_ = io.imread(file)
except:
print('Corrupted image detected: %s' % file)
def __len__(self):
return len(self.img_files)
# def __iter__(self):
# self.count = -1
# print('ran dataset iter')
# #self.shuffled_vector = np.random.permutation(self.nF) if self.augment else np.arange(self.nF)
# return self
def __getitem__(self, index):
if self.image_weights:
index = self.indices[index]
img_path = self.img_files[index]
label_path = self.label_files[index]
hyp = self.hyp
# Load image
img = self.imgs[index]
if img is None:
img = cv2.imread(img_path) # BGR
assert img is not None, 'File Not Found ' + img_path
r = self.img_size / max(img.shape) # size ratio
if self.augment and r < 1: # if training (NOT testing), downsize to inference shape
h, w, _ = img.shape
img = cv2.resize(img, (int(w * r), int(h * r)), interpolation=cv2.INTER_AREA)
if self.n < 3000: # cache into memory if image count < 3000
self.imgs[index] = img
# Augment colorspace
augment_hsv = True
if self.augment and augment_hsv:
# SV augmentation by 50%
img_hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV) # hue, sat, val
S = img_hsv[:, :, 1].astype(np.float32) # saturation
V = img_hsv[:, :, 2].astype(np.float32) # value
a = random.uniform(-1, 1) * hyp['hsv_s'] + 1
b = random.uniform(-1, 1) * hyp['hsv_v'] + 1
S *= a
V *= b
img_hsv[:, :, 1] = S if a < 1 else S.clip(None, 255)
img_hsv[:, :, 2] = V if b < 1 else V.clip(None, 255)
cv2.cvtColor(img_hsv, cv2.COLOR_HSV2BGR, dst=img)
# Letterbox
h, w, _ = img.shape
if self.rect:
shape = self.batch_shapes[self.batch[index]]
img, ratiow, ratioh, padw, padh = letterbox(img, new_shape=shape, mode='rect')
else:
shape = self.img_size
img, ratiow, ratioh, padw, padh = letterbox(img, new_shape=shape, mode='square')
# Load labels
labels = []
if os.path.isfile(label_path):
x = self.labels[index]
if x is None: # labels not preloaded
with open(label_path, 'r') as f:
x = np.array([x.split() for x in f.read().splitlines()], dtype=np.float32)
self.labels[index] = x # save for next time
# 由于对原始图片做了缩放,所以这里的label也要做相应处理
if x.size > 0:
print("sssssssssssssssssss")
# Normalized xywh to pixel xyxy format
# 这里的 w 和 h 是原始图片的宽和高,ratiow 和 ratioh 都等于 new_shape[0]/new_shape[0]
labels = x.copy()
# labels = x1, y1, x2, y2
labels[:, 1] = ratiow * w * (x[:, 1] - x[:, 3] / 2) + padw
labels[:, 2] = ratioh * h * (x[:, 2] - x[:, 4] / 2) + padh
labels[:, 3] = ratiow * w * (x[:, 1] + x[:, 3] / 2) + padw
labels[:, 4] = ratioh * h * (x[:, 2] + x[:, 4] / 2) + padh
# Augment image and labels
if self.augment:
img, labels = random_affine(img, labels,
degrees=hyp['degrees'],
translate=hyp['translate'],
scale=hyp['scale'],
shear=hyp['shear'])
nL = len(labels) # number of labels
if nL:
# convert xyxy to xywh
labels[:, 1:5] = xyxy2xywh(labels[:, 1:5])
# Normalize coordinates 0 - 1
labels[:, [2, 4]] /= img.shape[0] # height
labels[:, [1, 3]] /= img.shape[1] # width
if self.augment:
# random left-right flip
lr_flip = True
if lr_flip and random.random() > 0.5:
img = np.fliplr(img)
if nL:
labels[:, 1] = 1 - labels[:, 1]
# random up-down flip
ud_flip = False
if ud_flip and random.random() > 0.5:
img = np.flipud(img)
if nL:
labels[:, 2] = 1 - labels[:, 2]
labels_out = torch.zeros((nL, 6))
if nL:
labels_out[:, 1:] = torch.from_numpy(labels)
# Normalize
img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
img = np.ascontiguousarray(img, dtype=np.float32) # uint8 to float32
img /= 255.0 # 0 - 255 to 0.0 - 1.0
return torch.from_numpy(img), labels_out, img_path, (h, w)
@staticmethod
def collate_fn(batch):
img, label, path, hw = list(zip(*batch)) # transposed
for i, l in enumerate(label):
l[:, 0] = i # add target image index for build_targets()
return torch.stack(img, 0), torch.cat(label, 0), path, hw
2. utils.py
2.1 build_targets函数
从这里开始,我参考的pytorch版本为:https://github.com/eriklindernoren/PyTorch-YOLOv3
因为之前的那个版本写的不够清晰,而这个版本的代码我也验证过,所以后续都是针对这个版本分析,其中模块构建部分大同小异。
iou_scores, class_mask, obj_mask, noobj_mask, tx, ty, tw, th, tcls, tconf = build_targets(
pred_boxes=pred_boxes,
pred_cls=pred_cls,
target=targets,
anchors=self.scaled_anchors,
ignore_thres=self.ignore_thres,
def build_targets(pred_boxes, pred_cls, target, anchors, ignore_thres):
ByteTensor = torch.cuda.ByteTensor if pred_boxes.is_cuda else torch.ByteTensor
FloatTensor = torch.cuda.FloatTensor if pred_boxes.is_cuda else torch.FloatTensor
# pred_boxes: (8, 3, 13, 13, 4) targets: (number_of_groundtruth, 6)
print("target_size: ", target.size())
nB = pred_boxes.size(0)
nA = pred_boxes.size(1)
nC = pred_cls.size(-1)
nG = pred_boxes.size(2)
# pred_cls: (8, 3, 13, 13, 80) anchors:(3, 2)
# Output tensors
# nB=8, nA=3, nG=13, nG=13, nC=80
obj_mask = ByteTensor(nB, nA, nG, nG).fill_(0)
noobj_mask = ByteTensor(nB, nA, nG, nG).fill_(1)
class_mask = FloatTensor(nB, nA, nG, nG).fill_(0)
iou_scores = FloatTensor(nB, nA, nG, nG).fill_(0)
tx = FloatTensor(nB, nA, nG, nG).fill_(0)
ty = FloatTensor(nB, nA, nG, nG).fill_(0)
tw = FloatTensor(nB, nA, nG, nG).fill_(0)
th = FloatTensor(nB, nA, nG, nG).fill_(0)
tcls = FloatTensor(nB, nA, nG, nG, nC).fill_(0)
# Convert to position relative to box
target_boxes = target[:, 2:6] * nG
gxy = target_boxes[:, :2]
gwh = target_boxes[:, 2:]
# Get anchors with best iou
ious = torch.stack([bbox_wh_iou(anchor, gwh) for anchor in anchors]) # ious_size: (3, number_of_groundtruth)
# best_ious, best_n size: number_of_groundtruth
best_ious, best_n = ious.max(0)
# Separate target values
b, target_labels = target[:, :2].long().t()
# b= tensor([0, 0, 0, 0, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 2, 3, 3, 3, 3, 3, 3, 3, 3, 3, 3, 3, 3,3, 4, 4, 4, 4, 4, 4, 5, 5, 5, 6, 6, 6, 6, 6, 6, 6, 6, 6, 7, 7])
gx, gy = gxy.t()
gw, gh = gwh.t()
gi, gj = gxy.long().t()
# Set masks
obj_mask[b, best_n, gj, gi] = 1
noobj_mask[b, best_n, gj, gi] = 0
# Set noobj mask to zero where iou exceeds ignore threshold
for i, anchor_ious in enumerate(ious.t()):
noobj_mask[b[i], anchor_ious > ignore_thres, gj[i], gi[i]] = 0
# Coordinates
tx[b, best_n, gj, gi] = gx - gx.floor()
ty[b, best_n, gj, gi] = gy - gy.floor()
# Width and height
tw[b, best_n, gj, gi] = torch.log(gw / anchors[best_n][:, 0] + 1e-16)
th[b, best_n, gj, gi] = torch.log(gh / anchors[best_n][:, 1] + 1e-16)
# One-hot encoding of label
tcls[b, best_n, gj, gi, target_labels] = 1
# Compute label correctness and iou at best anchor
class_mask[b, best_n, gj, gi] = (pred_cls[b, best_n, gj, gi].argmax(-1) == target_labels).float()
iou_scores[b, best_n, gj, gi] = bbox_iou(pred_boxes[b, best_n, gj, gi], target_boxes, x1y1x2y2=False)
tconf = obj_mask.float()
return iou_scores, class_mask, obj_mask, noobj_mask, tx, ty, tw, th, tcls, tconf
3. 训练
3.1 损失函数
损失函数由3部分构成:位置预测损失、置信度损失、分类损失;每一个部分都是针对bounding box而言的,其中只有当某个bounding box对一个真实的ground truth负责时,才会有位置预测损失和分类损失,而置信度损失每个bounding box都有,不同的是对真实的ground truth负责的bounding box和不负责的拥有不用的权重系数。
# Loss : Mask outputs to ignore non-existing objects (except with conf. loss)
loss_x = self.mse_loss(x[obj_mask], tx[obj_mask])
loss_y = self.mse_loss(y[obj_mask], ty[obj_mask])
loss_w = self.mse_loss(w[obj_mask], tw[obj_mask])
loss_h = self.mse_loss(h[obj_mask], th[obj_mask])
loss_conf_obj = self.bce_loss(pred_conf[obj_mask], tconf[obj_mask])
loss_conf_noobj = self.bce_loss(pred_conf[noobj_mask], tconf[noobj_mask])
loss_conf = self.obj_scale * loss_conf_obj + self.noobj_scale * loss_conf_noobj
loss_cls = self.bce_loss(pred_cls[obj_mask], tcls[obj_mask])
total_loss = loss_x + loss_y + loss_w + loss_h + loss_conf + loss_cls
3.2 mAP计算
mAP本质是每个类别的 precision-recall 曲线与 x 轴围成的面积均值,那么每个类别的precision和recall是如何计算的呢?那么如何评价一个bounding box对真实ground truth预测正确与否呢?肯定是类别要相同、IOU要超过置信度阈值、置信度分数也要大于置信度阈值。
我们都知道, p r e c i s i o n = T P T P + F P , r e c a l l = T P T P + F N precision = \frac{TP}{TP+FP},recall=\frac{TP}{TP+FN} precision=TP+FPTP,recall=TP+FNTP,这里的TP的数目指的是真实的ground truth中预测也正确的比例;TP+FP的数目指的是预测正确的数目;TP+FN的数目指的是真实正确的数目。
# Metrics
cls_acc = 100 * class_mask[obj_mask].mean()
conf_obj = pred_conf[obj_mask].mean()
conf_noobj = pred_conf[noobj_mask].mean()
conf50 = (pred_conf > 0.5).float()
iou50 = (iou_scores > 0.5).float()
iou75 = (iou_scores > 0.75).float()
detected_mask = conf50 * class_mask * tconf
precision = torch.sum(iou50 * detected_mask) / (conf50.sum() + 1e-16)
recall50 = torch.sum(iou50 * detected_mask) / (obj_mask.sum() + 1e-16)
recall75 = torch.sum(iou75 * detected_mask) / (obj_mask.sum() + 1e-16)
def ap_per_class(tp, conf, pred_cls, target_cls):
""" Compute the average precision, given the recall and precision curves.
Source: https://github.com/rafaelpadilla/Object-Detection-Metrics.
# Arguments
tp: True positives (list).
conf: Objectness value from 0-1 (list).
pred_cls: Predicted object classes (list).
target_cls: True object classes (list).
# Returns
The average precision as computed in py-faster-rcnn.
"""
# Sort by objectness
i = np.argsort(-conf)
tp, conf, pred_cls = tp[i], conf[i], pred_cls[i]
# Find unique classes
unique_classes = np.unique(target_cls)
# Create Precision-Recall curve and compute AP for each class
ap, p, r = [], [], []
for c in tqdm.tqdm(unique_classes, desc="Computing AP"):
i = pred_cls == c
n_gt = (target_cls == c).sum() # Number of ground truth objects
n_p = i.sum() # Number of predicted objects
if n_p == 0 and n_gt == 0:
continue
elif n_p == 0 or n_gt == 0:
ap.append(0)
r.append(0)
p.append(0)
else:
# Accumulate FPs and TPs
fpc = (1 - tp[i]).cumsum()
tpc = (tp[i]).cumsum()
# Recall
recall_curve = tpc / (n_gt + 1e-16)
r.append(recall_curve[-1])
# Precision
precision_curve = tpc / (tpc + fpc)
p.append(precision_curve[-1])
# AP from recall-precision curve
ap.append(compute_ap(recall_curve, precision_curve))
# Compute F1 score (harmonic mean of precision and recall)
p, r, ap = np.array(p), np.array(r), np.array(ap)
f1 = 2 * p * r / (p + r + 1e-16)
return p, r, ap, f1, unique_classes.astype("int32")
def compute_ap(recall, precision):
""" Compute the average precision, given the recall and precision curves.
Code originally from https://github.com/rbgirshick/py-faster-rcnn.
# Arguments
recall: The recall curve (list).
precision: The precision curve (list).
# Returns
The average precision as computed in py-faster-rcnn.
"""
# correct AP calculation
# first append sentinel values at the end
mrec = np.concatenate(([0.0], recall, [1.0]))
mpre = np.concatenate(([0.0], precision, [0.0]))
# compute the precision envelope
for i in range(mpre.size - 1, 0, -1):
mpre[i - 1] = np.maximum(mpre[i - 1], mpre[i])
# to calculate area under PR curve, look for points
# where X axis (recall) changes value
i = np.where(mrec[1:] != mrec[:-1])[0]
# and sum (\Delta recall) * prec
ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1])
return ap
def get_batch_statistics(outputs, targets, iou_threshold):
""" Compute true positives, predicted scores and predicted labels per sample """
batch_metrics = []
for sample_i in range(len(outputs)):
if outputs[sample_i] is None:
continue
output = outputs[sample_i]
pred_boxes = output[:, :4]
pred_scores = output[:, 4]
pred_labels = output[:, -1]
true_positives = np.zeros(pred_boxes.shape[0])
annotations = targets[targets[:, 0] == sample_i][:, 1:]
target_labels = annotations[:, 0] if len(annotations) else []
if len(annotations):
detected_boxes = []
target_boxes = annotations[:, 1:]
for pred_i, (pred_box, pred_label) in enumerate(zip(pred_boxes, pred_labels)):
# If targets are found break
if len(detected_boxes) == len(annotations):
break
# Ignore if label is not one of the target labels
if pred_label not in target_labels:
continue
iou, box_index = bbox_iou(pred_box.unsqueeze(0), target_boxes).max(0)
if iou >= iou_threshold and box_index not in detected_boxes:
true_positives[pred_i] = 1
detected_boxes += [box_index]
batch_metrics.append([true_positives, pred_scores, pred_labels])
return batch_metrics