PyTorch 学习笔记(九):自动编码器(AutoEncoder)
一. 生成模型
生成模型(Generative Model)这一概念属于概率统计与机器学习,是指一系列用于随机生成可观测预测数据得模型。简而言之,就是 “生成” 的样本和 “真实” 的样本尽可能地相似。生成模型的两个主要功能就是学习一个概率分布 P m o d e l ( X ) P_{model}(X) Pmodel(X)和生成数据,这是非常重要的,不仅可以用在无监督学习中,还可以用在监督学习中。
无监督学习的发展一直比较缓慢,生成模型希望能够让无监督学习取得比较大的进展。
二. 自动编码器——自监督学习
自动编码器(AutoEncoder)最开始作为一种数据的压缩方法,其特点有:
- 跟数据相关程度很高,这意味着自动编码器只能压缩与训练数据相似的数据,因为使用神经网络提取的特征一般是高度相关于原始的训练集,使用人脸训练出的自动编码器在压缩自然界动物的图片时就会表现的很差,因为它只学习到了人脸的特征,而没有学习到自然界图片的特征。
- 压缩后数据是有损的,这是因为降维的过程中不可避免地丢失信息,解压之后的输出和原始的输入相比是退化的。
到了2012年,人们发现在卷积神经网络中使用自动编码器做逐层预训练可以训练更深层的网络,但是人们很快发现,良好的初始化策略要比复杂的逐层预训练有效得多,2014年的Batch Normalization技术也使得更深的网络能够被有效训练,到了2015年年底,通过ResNet基本可以训练任意深度的神经网络了。
现在自动编码器主要应用在两个方面:第一是数据去噪,第二是进行可视化降维。自动编码器还有一个功能,即生成数据。
那么自动编码器是如何对深层网络做分层训练的呢?我们先来看看自动编码器的一般结构:

从上图可以看到两个部分:第一个部分是编码器(Encoder),第二个部分是解码器(Decoder),编码器和解码器都可以是任意的模型,通常使用神经网络作为编码器和解码器。输入的数据经过神经网络降维到一个编码(code),接着又通过另外一个神经网络去解码得到一个与输入原数据一模一样的生成数据,然后通过比较这两个数据,最小化它们之间的差异来训练这个网络中编码器和解码器的参数。
看完了网络结构,我们再来看看自动编码器是如何对深层网络做分层训练,如下图所示,我们将input输入一个encoder编码器,就会得到一个code,这个code也就是输入的一个表示,那么我们怎么知道这个code表示的就是input呢?我们加一个decoder解码器,这时候decoder就会输出一个信息,如果输出的这个信息和一开始的输入信号input是很像的(理想情况下就是一样的),那很明显,我们就有理由相信这个code是靠谱的。所以,我们就通过调整encoder和decoder的参数,使得重构误差最小,这时候我们就得到了输入input信号的第一个表示了,也就是编码code了。因为是无标签数据,所以误差的来源就是直接重构后与原输入相比得到。我们的重构误差最小让我们相信这个code就是原输入信号的良好表达了,或者牵强点说,它和原信号是一模一样的。接着,我们将第一层输出的code当成第二层的输入信号,同样最小化重构误差,就会得到第二层的参数,并且得到第二层输出的code,也就是原输入信息的第二个表达了。其他层就同样的方法炮制就行了(训练这一层,前面层的参数都是固定的,并且他们的decoder已经没用了,都不需要了)。
需要注意的是,整个网络的训练不是一蹴而就的,而是逐层进行。如果按n→m→k
结构,实际上我们是先训练网络n→m→n,得到n→m的变换,然后再训练m→k→m,得到m→k的变换。最终堆叠成SAE,即为n→m→k的结果,整个过程就像一层层往上盖房子,这便是大名鼎鼎的 layer-wise unsuperwised pre-training (逐层非监督预训练),正是导致深度学习(神经网络)在2006年第3次兴起的核心技术。

为了尽量学到有意义的表达,我们会给code加入一定的约束。从数据维度来看,常见以下两种情况:
- 如果input的维度大于code的维度,也就是说从 i n p u t → c o d e input\rightarrow code input→code的变换是一种降维的操作,网络试图以更小的维度来描述原始数据而尽量不损失数据信息。实际上,当两层之间的变换均为线性,且损失函数为平方差损失函数时,该网络等价于PCA;
- 如果input的维度小于等于code的维度。这又有什么用呢?其实不好说,但比如我们同时约束code的表达尽量稀疏(有大量维度为0,未被激活),此时的编码器便是大名鼎鼎的“稀疏自编码器”。可为什么稀疏的表达就是好的呢?这就说来话长了,有人试图从人脑机理对比,即人类神经系统在某刺激下,大部分神经元是被抑制的。个人觉得,从特征的角度来看直接些,稀疏的表达意味着系统在尝试去特征选择,找出大量维度中真正重要的若干维度。
三. 自编码器的一般形式
构建一个自动编码器并当对其完成训练完之后,拿出这个解码器,随机传入一个编码(code),通过解码器能够生成一个和原始数据差不多的数据,就是生成数据。
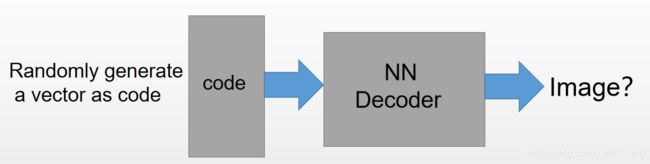
下面我们将用PyTorch简单地实现一个自动编码器实现“生成数据”:
import torch
from torch import nn, optim
from torch.autograd import Variable
from torchvision import transforms, datasets
from torch.utils.data import DataLoader
from torchvision.utils import save_image
import os
import matplotlib.pyplot as plt
# 加载数据集
def get_data():
# 将像素点转换到[-1, 1]之间,使得输入变成一个比较对称的分布,训练容易收敛
data_tf = transforms.Compose([transforms.ToTensor(), transforms.Normalize([0.5], [0.5])])
train_dataset = datasets.MNIST(root='./data', train=True, transform=data_tf, download=True)
train_loader = DataLoader(train_dataset, shuffle=True, batch_size=batch_size, drop_last=True)
return train_loader
def to_img(x):
x = (x + 1.) * 0.5
x = x.clamp(0, 1)
x = x.view(x.size(0), 1, 28, 28)
return x
class autoencoder(nn.Module):
def __init__(self):
super(autoencoder, self).__init__()
self.encoder = nn.Sequential(nn.Linear(28*28, 128),
nn.ReLU(True),
nn.Linear(128, 64),
nn.ReLU(True),
nn.Linear(64, 12),
nn.ReLU(True),
nn.Linear(12, 3))
self.decoder = nn.Sequential(nn.Linear(3, 12),
nn.ReLU(True),
nn.Linear(12, 64),
nn.ReLU(True),
nn.Linear(64, 128),
nn.ReLU(True),
nn.Linear(128, 28*28),
nn.Tanh())
def forward(self, x):
encode = self.encoder(x)
decode = self.decoder(encode)
return encode, decode
if __name__ == "__main__":
# 超参数设置
batch_size = 128
lr = 1e-2
weight_decay = 1e-5
epoches = 40
model = autoencoder()
# x = Variable(torch.randn(1, 28*28))
# encode, decode = model(x)
# print(encode.shape)
train_data = get_data()
criterion = nn.MSELoss()
optimizier = optim.Adam(model.parameters(), lr=lr, weight_decay=weight_decay)
if torch.cuda.is_available():
model.cuda()
for epoch in range(epoches):
if epoch in [epoches * 0.25, epoches * 0.5]:
for param_group in optimizier.param_groups:
param_group['lr'] *= 0.1
for img, _ in train_data:
img = img.view(img.size(0), -1)
img = Variable(img.cuda())
# forward
_, output = model(img)
loss = criterion(output, img)
# backward
optimizier.zero_grad()
loss.backward()
optimizier.step()
print("epoch=", epoch, loss.data.float())
for param_group in optimizier.param_groups:
print(param_group['lr'])
if (epoch+1) % 5 == 0:
print("epoch: {}, loss is {}".format((epoch+1), loss.data))
pic = to_img(output.cpu().data)
if not os.path.exists('./simple_autoencoder'):
os.mkdir('./simple_autoencoder')
save_image(pic, './simple_autoencoder/image_{}.png'.format(epoch + 1))
# torch.save(model, './autoencoder.pth')
# model = torch.load('./autoencoder.pth')
code = Variable(torch.FloatTensor([[1.19, -3.36, 2.06]]).cuda())
decode = model.decoder(code)
decode_img = to_img(decode).squeeze()
decode_img = decode_img.data.cpu().numpy() * 255
plt.imshow(decode_img.astype('uint8'), cmap='gray')
plt.show()
运行100个epoch之后的数据结果:

给训练后的autoencoder随机给一个code为[[1.19, -3.36, 2.06]](其实这里不严谨,我们并不知道给的这个随机向量是否包含有数字的信息,所以有可能你赋值的随机向量decoder之后的图片并不是一张数字图片),用decode解码得到图片:
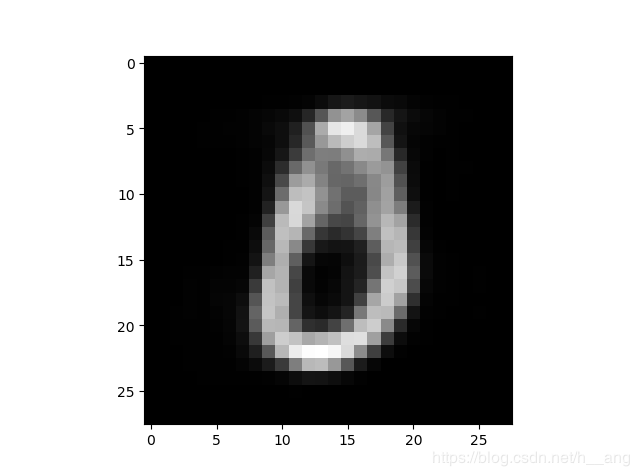
可以看出来,解码得到的图片相当模糊,可能是因为我们code的维度太低了,导致encoder的过程中损失的信息过多,decoder得到的图片与原始图片相比就会比较模糊。
考虑到全连接网络的表征能力有限,下面将其换为卷积网络试试。
import torch
from torch import nn, optim
from torch.autograd import Variable
from torchvision import transforms, datasets
from torch.utils.data import DataLoader
from torchvision.utils import save_image
import os
import matplotlib.pyplot as plt
# 加载数据集
def get_data():
# 将像素点转换到[-1, 1]之间,使得输入变成一个比较对称的分布,训练容易收敛
data_tf = transforms.Compose([transforms.ToTensor(), transforms.Normalize([0.5], [0.5])])
train_dataset = datasets.MNIST(root='./data', train=True, transform=data_tf, download=True)
train_loader = DataLoader(train_dataset, shuffle=True, batch_size=batch_size, drop_last=True)
return train_loader
def to_img(x):
x = (x + 1.) * 0.5
x = x.clamp(0, 1)
x = x.view(x.size(0), 1, 28, 28)
return x
class autoencoder(nn.Module):
def __init__(self):
super(autoencoder, self).__init__()
self.encoder = nn.Sequential(
nn.Conv2d(1, 16, 3, stride=3, padding=1), # (b, 16, 10, 10)
nn.ReLU(True),
nn.MaxPool2d(2, stride=2), # (b, 16, 5, 5)
nn.Conv2d(16, 8, 3, stride=2, padding=1), # (b, 8, 3, 3)
nn.ReLU(True),
nn.MaxPool2d(2, stride=1) # (b, 8, 2, 2)
)
self.decoder = nn.Sequential(
nn.ConvTranspose2d(8, 16, 3, stride=2), # (b, 16, 5, 5)
nn.ReLU(True),
nn.ConvTranspose2d(16, 8, 5, stride=3, padding=1), # (b, 8, 15, 15)
nn.ReLU(True),
nn.ConvTranspose2d(8, 1, 2, stride=2, padding=1), # (b, 1, 28, 28)
nn.Tanh()
)
def forward(self, x):
encode = self.encoder(x)
decode = self.decoder(encode)
return encode, decode
if __name__ == "__main__":
# 超参数设置
batch_size = 128
lr = 1e-2
weight_decay = 1e-5
epoches = 100
model = autoencoder()
# x = Variable(torch.randn(1, 28*28))
# encode, decode = model(x)
# print(encode.shape)
train_data = get_data()
criterion = nn.MSELoss()
optimizier = optim.Adam(model.parameters(), lr=lr, weight_decay=weight_decay)
if torch.cuda.is_available():
model.cuda()
for epoch in range(epoches):
if epoch in [epoches * 0.25, epoches * 0.5]:
for param_group in optimizier.param_groups:
param_group['lr'] *= 0.1
for img, _ in train_data:
# img = img.view(img.size(0), -1)
img = Variable(img.cuda())
# forward
_, output = model(img)
loss = criterion(output, img)
# backward
optimizier.zero_grad()
loss.backward()
optimizier.step()
print("epoch=", epoch, loss.data.float())
for param_group in optimizier.param_groups:
print(param_group['lr'])
if (epoch+1) % 5 == 0:
print("epoch: {}, loss is {}".format((epoch+1), loss.data))
pic = to_img(output.cpu().data)
if not os.path.exists('./simple_autoencoder'):
os.mkdir('./simple_autoencoder')
save_image(pic, './simple_autoencoder/image_{}.png'.format(epoch + 1))
torch.save(model, './autoencoder.pth')
# model = torch.load('./autoencoder.pth')
code = Variable(torch.FloatTensor([[1.19, -3.36, 2.06]]).cuda())
decode = model.decoder(code)
decode_img = to_img(decode).squeeze()
decode_img = decode_img.data.cpu().data * 255
plt.imshow(decode_img.numpy().astype('uint8'), cmap='gray')
save_image(decode_img, './simple_autoencoder/image_code.png')
plt.show()
运行了40个epoches后,结果:
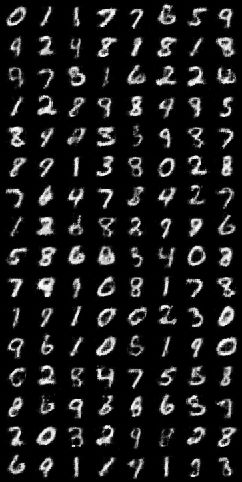
这里用到了反卷积的操作:https://zhuanlan.zhihu.com/p/48501100
四. 自编码器的变种形式
学习完自编码器的一般形式——堆叠自编码器后,我们可能会有一个问题:code维度到底如何确定?为什么稀疏的特征比较好?或者更准确来讲,code怎么才能称得上是对input的一个好的表达?
事实上,这个答案并不唯一,也正是从不同的角度去思考这个问题,导致了自编码器的各种变种形式出现。目前常见的几种模型总结如下:
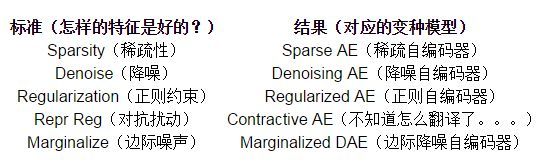
1. 变分自动编码器
变分自动编码器(Variational AutoEncoder)是自动编码器的升级版本,它的结构和自动编码器是相似的,也是由编码器和解码器构成的。
在自动编码器中,需要一个输入图片,然后将输入图片编码之后得到一个隐含向量,这比随机取一个随机向量好,因为这包含着原图片的信息,然后将隐含信息解码得到与原图片对应的照片。但是这样并不能生成任意图片,因为没办法构造隐含向量,需要通过一张图片输入编码才知道得到的隐含向量是什么,这时就可以通过变分自动编码器解决这个问题。
其实原理很简单,只需要在编码过程中给它增加一些限制,迫使它生成的隐含向量能够粗略地遵循一个标准正态分布,这就是它与一般的自动编码器最大的不同。这样生成一张新图片就很简单了,只需要给它一个标准正态分布的随机隐含向量,通过解码器就能够生成想要的图片,而不需要先给它一张原始图片编码。
在实际情况中,需要在模型的准确率和隐含向量服从标准正态分布之间做一个权衡,所谓模型的准确率就是指解码器生成的图片与原始图片的相似程度。可以让神经网络自己做这个决定,只需要将两者都做一个loss,然后求和作为总的loss,这样网络就能够自己选择如何做才能使这个总的loss下降。另外要衡量两种分布的相似程度,需要引入一个新的概念,KL divergence,这是用来衡量两种分布相似程度的统计量,它越小,表示两种概率分布越接近。
对于离散的概率分布,定义如下: D K L ( P ∣ ∣ Q ) = ∑ i P ( i ) l o g P ( i ) Q ( i ) D_{KL}(P||Q)=\sum _{i}P(i)log\frac{P(i)}{Q(i)} DKL(P∣∣Q)=∑iP(i)logQ(i)P(i)
对于连续的概率分布,定义如下: D K L ( P ∣ ∣ Q ) = ∫ − ∞ ∞ p ( x ) l o g p ( x ) q ( x ) d x D_{KL}(P||Q)=\int_{-\infty }^{\infty }p(x)log\frac{p(x)}{q(x)}dx DKL(P∣∣Q)=∫−∞∞p(x)logq(x)p(x)dx
这里就是用KL divergence 表示隐含向量与标准正态分布之间差异的loss,另外一个loss仍然使用生成图片与原图片的均方误差来表示。
这里的变分编码器使用了一个技巧——“重新参数化”来解决KL divergence的计算问题。这时不再是每次生成一个隐含向量,而是生成两个向量:一个表示均值,一个表示标准差,然后通过这两个统计量合成隐含向量,用一个标准正太分布先乘标准差再加上均值就行了,这里默认编码之后的隐含向量是服从一个正态分布的。这个时候要让均值尽可能接近0,标准差尽可能接近1。
关于VAE的详细了解参见:https://zhuanlan.zhihu.com/p/34998569
代码如下:
import os
import torch
from torch import nn, optim
from torch.autograd import Variable
from torchvision import transforms, datasets
from torch.utils.data import DataLoader
import torch.nn.functional as F
from torchvision.utils import save_image
# 加载数据集
def get_data():
data_tf = transforms.Compose([transforms.ToTensor(), transforms.Normalize([0.5], [0.5])])
train_data = datasets.MNIST(root='./data', train=True, transform=data_tf, download=True)
train_loader = DataLoader(train_data, shuffle=True, batch_size=batch_size, drop_last=True)
return train_loader
class VAE(nn.Module):
def __init__(self):
super(VAE, self).__init__()
self.fc1 = nn.Linear(784, 400)
self.fc21 = nn.Linear(400, 20) # 均值
self.fc22 = nn.Linear(400, 20) # 方差
self.fc3 = nn.Linear(20, 400)
self.fc4 = nn.Linear(400, 784)
def encoder(self, x):
h1 = F.relu(self.fc1(x))
mu = self.fc21(h1)
logvar = self.fc22(h1)
return mu, logvar
def decoder(self, z):
h3 = F.relu(self.fc3(z))
x = F.tanh(self.fc4(h3))
return x
# 重新参数化
def reparametrize(self, mu, logvar):
std = logvar.mul(0.5).exp_() # 计算标准差
if torch.cuda.is_available():
eps = torch.cuda.FloatTensor(std.size()).normal_() # 从标准的正态分布中随机采样一个eps
else:
eps = torch.FloatTensor(std.size()).normal_()
eps = Variable(eps)
return eps.mul(std).add_(mu)
def forward(self, x):
mu, logvar = self.encoder(x)
z = self.reparametrize(mu, logvar)
return self.decoder(z), mu, logvar
def loss_function(recon_x, x, mu, logvar):
MSE = reconstruction_function(recon_x, x)
# loss = 0.5 * sum(1 + log(sigma^2) - mu^2 - sigma^2)
KLD_element = mu.pow(2).add_(logvar.exp()).mul_(-1).add_(1).add_(logvar)
KLD = torch.sum(KLD_element).mul_(-0.5)
# KL divergence
return MSE + KLD
def to_img(x):
x = (x + 1.) * 0.5
x = x.clamp(0, 1)
x = x.view(x.size(0), 1, 28, 28)
return x
if __name__ == '__main__':
# 超参数设置
batch_size = 128
lr = 1e-3
epoches = 100
model = VAE()
if torch.cuda.is_available():
model.cuda()
train_data = get_data()
reconstruction_function = nn.MSELoss(reduction='sum')
optimizer = optim.Adam(model.parameters(), lr=lr)
for epoch in range(epoches):
for img, _ in train_data:
img = img.view(img.size(0), -1)
img = Variable(img)
if torch.cuda.is_available():
img = img.cuda()
# forward
output, mu, logvar = model(img)
loss = loss_function(output, img, mu, logvar)/img.size(0)
# backward
optimizer.zero_grad()
loss.backward()
optimizer.step()
print("epoch=", epoch, loss.data.float())
if (epoch+1) % 10 == 0:
print("epoch = {}, loss is {}".format(epoch+1, loss.data))
pic = to_img(output.cpu().data)
if not os.path.exists('./vae_img1'):
os.mkdir('./vae_img1')
save_image(pic, './vae_img1/image_{}.png'.format(epoch + 1))
torch.save(model, './vae.pth')
运行100个eopch之后,结果如下,可以看出来结果比上面的自动编码器清晰一点,本质上VAE就是在encoder的结果添加了高斯噪声,通过训练要使得decoder对噪声有一定的鲁棒性,这样的话我们生成一张图片就没有必须用一张图片先做编码了,可以想象,我们只需要利用训练好的encoder对一张图片编码得到其分布后,符合这个分布的隐含向量理论上都可以通过decoder得到类似这张图片的图片。
KL越小,噪声越大(可以这麽理解,我们强行让z的分布符合正态分布,其和N(0,1)越接近,KL越小,相当于我们添加的噪声越大),所以直觉上来想loss合并后的训练过程:
- 当 decoder 还没有训练好时(重构误差远大于 KL loss),就会适当降低噪声(KL loss 增加),使得拟合起来容易一些(重构误差开始下降);
- 反之,如果 decoder 训练得还不错时(重构误差小于 KL loss),这时候噪声就会增加(KL loss 减少),使得拟合更加困难了(重构误差又开始增加),这时候 decoder 就要想办法提高它的生成能力了。

我们实现上面的代码时遇到了一个坑,就是nn.MSE()函数,需要声明的是nn.MSE(reduction=‘sum’)求的是每个batchsize上的loss值,最后除以batchsize就可以得到每个输入的loss均值;nn.MSE(reduction=‘mean’)求的是所有元素的均值,而非每个输入的均值,因为每个输入是28*28的向量,使用nn.MSE(reduction=‘mean’)计算出来的是nn.MSE(reduction=‘sum’)/(784 * batchsize)。所以我们这里用的是nn.MSE(reduction=‘sum’。)
参考
https://zhuanlan.zhihu.com/p/34998569
《深度学习入门之PyTorch》一书