论文笔记《Fully Convolutional Networks for Semantic Segmentation》
【论文信息】
《Fully Convolutional Networks for Semantic Segmentation》
CVPR 2015 best paper
key word: pixel level, fully supervised, CNN
【方法简介】
主要思路是把CNN改为FCN,输入一幅图像后直接在输出端得到dense prediction,也就是每个像素所属的class,从而得到一个end-to-end的方法来实现image semantic segmentation。
我们已经有一个CNN模型,首先要把CNN的全连接层看成是卷积层,卷积模板大小就是输入的特征map的大小,也就是说把全连接网络看成是对整张输入map做卷积,全连接层分别有4096个6*6的卷积核,4096个1*1的卷积核,1000个1*1的卷积核,如下图:
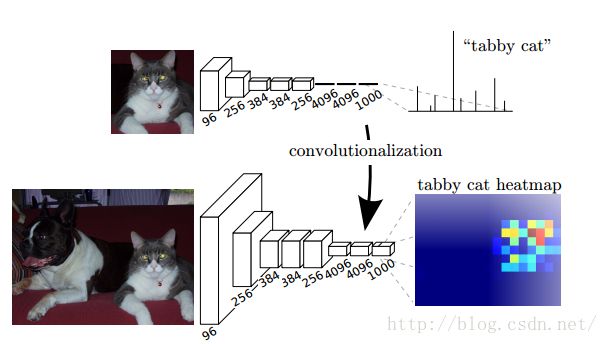
接下来就要对这1000个1*1卷积核的输出,做upsampling,得到1000个原图大小(如32*32)的输出,这些输出合并后,得到上图所示的heatmap。
【细节记录】
------------2016.11.4更新---------
fcn的输入图片为什么可以是任意大小呢?
首先,我们来看传统CNN为什么需要固定输入图片大小。
对于CNN,一幅输入图片在经过卷积和pooling层时,这些层是不care图片大小的。比如对于一个卷积层,outputsize = (inputsize - kernelsize) / stride + 1,它并不关心inputsize多大,对于一个inputsize大小的输入feature map,滑窗卷积,输出outputsize大小的feature map即可。pooling层同理。等要进入全连接层时,feature map(假设大小为n×n)要拉成一条向量,而向量中每个元素(共n^2个)作为一个结点都要与下一个层的所有结点(假设4096个)全连接,这里的权值个数是4096 × n^2,而我们知道神经网络结构一旦确定,它的权值个数都是固定的,所以这个n不能变化,n是conv5的outputsize,所以层层向回看,每个outputsize都要固定,那每个inputsize都要固定,因此输入图片大小要固定。
所以可以得出结论,一个确定的CNN网络结构之所以要固定输入图片大小,是因为全连接层权值数固定,而该权值数和feature map大小有关。
接着,我们来看FCN。FCN在CNN的基础上把1000个结点的全连接层改为含有1000个1×1卷积核的卷积层,经过这一层,还是得到二维的feature map,同样我们也不关心这个feature map大小。
到了反卷积层,注意,反卷积层也是卷积层,不关心input大小,滑窗卷积后输出output。
配个动图简单理解一下:下图中蓝色是反卷积层的input,绿色是反卷积层的output。
kernel size = 3, stride = 1的反卷积,input是2×2, output是4×4
kernel size = 3, stride = 2的反卷积,input是3×3, output是5×5:
最后,问题来了,怎么使反卷积的output大小和输入图片大小一致,从而得到pixel level prediction。
我们知道,FCN里面全部都是卷积层(pooling也看成卷积),卷积层不关心input的大小,inputsize和outputsize之间存在线性关系。假设图片输入为n×n大小,第一个卷积层输出map就为conv1_out.size=(n-kernelsize)/stride + 1, 记做conv1_out.size = f(n), 依次类推,conv5_out.size = f(conv5_in.size) = f(... f(n)), 反卷积是要使n = f‘(conv5_out.size)成立,要确定f’,就需要设置deconvolution层的kernelsize,stride,padding,计算方法如下:
layer {
name: "upsample", type: "Deconvolution"
bottom: "{{bottom_name}}" top: "{{top_name}}"
convolution_param {
kernel_size: {{2 * factor - factor % 2}} stride: {{factor}}
num_output: {{C}} group: {{C}}
pad: {{ceil((factor - 1) / 2.)}}
weight_filler: { type: "bilinear" } bias_term: false
}
param { lr_mult: 0 decay_mult: 0 }
}
其中factor是指反卷积之前的所有卷积pooling层的累积采样步长,卷积层使feature map变小,是因为stride,卷积操作造成的影响一般通过padding来消除,因此,累积采样步长factor就等于反卷积之前所有层的stride的乘积。参看FCN-alexnet的结构
-----------------------------------------------
dense prediction
这里通过upsampling得到dense prediction,作者研究过3种方案:
1,shift-and-stitch:设原图与FCN所得输出图之间的降采样因子是f,那么对于原图的每个f*f的区域(不重叠),“shift the input x pixels to the right and y pixels down for every (x,y) ,0 < x,y < f." 把这个f*f区域对应的output作为此时区域中心点像素对应的output,这样就对每个f*f的区域得到了f^2个output,也就是每个像素都能对应一个output,所以成为了dense prediction。
2,filter rarefaction:就是放大CNN网络中的subsampling层的filter的尺寸,得到新的filter:

其中s是subsampling的滑动步长,这个新filter的滑动步长要设为1,这样的话,subsampling就没有缩小图像尺寸,最后可以得到dense prediction。
以上两种方法作者都没有采用,主要是因为这两种方法都是trad-off的,原因是:
对于第二种方法, 下采样的功能被减弱,使得更细节的信息能被filter看到,但是receptive fileds会相对变小,可能会损失全局信息,且会对卷积层引入更多运算。
对于第一种方法,虽然receptive fileds没有变小,但是由于原图被划分成f*f的区域输入网络,使得filters无法感受更精细的信息。
3,这里upsampling的操作可以看成是反卷积(deconvolutional),卷积运算的参数和CNN的参数一样是在训练FCN模型的过程中通过bp算法学习得到。
fusion prediction
以上是对CNN的结果做处理,得到了dense prediction,而作者在试验中发现,得到的分割结果比较粗糙,所以考虑加入更多前层的细节信息,也就是把倒数第几层的输出和最后的输出做一个fusion,实际上也就是加和:
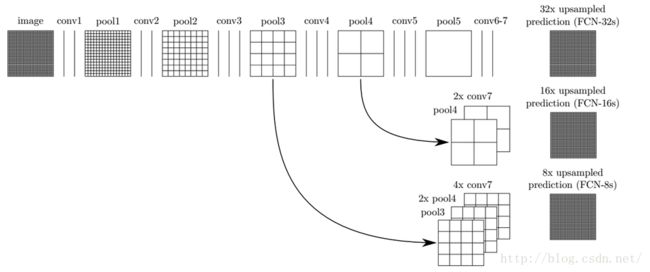
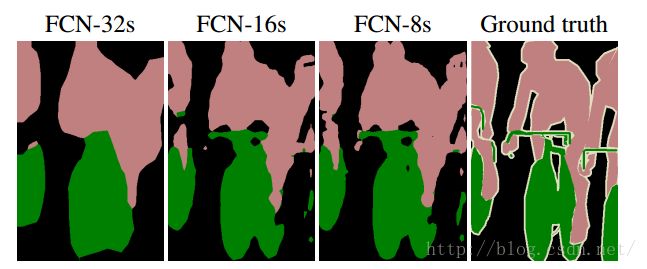
这样就得到第二行和第三行的结果,实验表明,这样的分割结果更细致更准确。在逐层fusion的过程中,做到第三行再往下,结果又会变差,所以作者做到这里就停了。可以看到如上三行的对应的结果:
【实验设计】
1,对比3种性能较好的几种CNN:AlexNet, VGG16, GoogLeNet进行实验,选择VGG16
2,对比FCN-32s-fixed, FCN-32s, FCN-16s, FCN-8s,证明最好的dense prediction组合是8s
3,FCN-8s和state-of-the-art对比是最优的,R-CNN, SDS. FCN-16s
4,FCN-16s和现有的一些工作对比,是最优的
5,FCN-32s和FCN-16s在RGB-D和HHA的图像数据集上,优于state-of-the-art
【总结】
优点
1,训练一个end-to-end的FCN模型,利用卷积神经网络的很强的学习能力,得到较准确的结果,以前的基于CNN的方法都是要对输入或者输出做一些处理,才能得到最终结果。
2,直接使用现有的CNN网络,如AlexNet, VGG16, GoogLeNet,只需在末尾加上upsampling,参数的学习还是利用CNN本身的反向传播原理,"whole image training is effective and efficient."
3,不限制输入图片的尺寸,不要求图片集中所有图片都是同样尺寸,只需在最后upsampling时按原图被subsampling的比例缩放回来,最后都会输出一张与原图大小一致的dense prediction map。
缺陷
根据论文的conclusion部分所示的实验输出sample如下图:
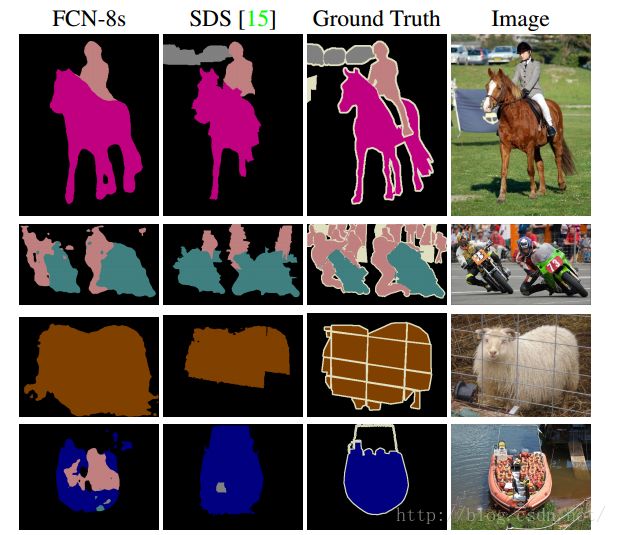
可以直观地看出,本文方法和Groud truth相比,容易丢失较小的目标,比如第一幅图片中的汽车,和第二幅图片中的观众人群,如果要改进的话,这一点上应该是有一些提升空间的。