图像处理经典算法及OpenCV程序
基于opencv的use摄像头视频采集程序... 1
基于opencv的两个摄像头数据采集... 3
能激发你用代码做视频的冲动程序... 6
图像反转(就是把黑的变白,白的变黑)... 11
图像格式的转换... 12
从摄像头或者AVI文件中得到视频流,对视频流进行边缘检测... 13
采用Canny算子进行边缘检测... 15
角点检测... 18
图像的旋转加缩放(效果很拽,用地球做就像谷歌地球似的)... 21
Log-Polar极坐标变换... 22
对图像进行形态学操作(图像的开闭,腐蚀和膨胀运算)... 24
用不同的核进行图像的二维滤波... 27
图像域的填充... 30
寻找轮廓实现视频流的运动目标检测(超推荐一下)... 35
采用金字塔方法进行图像分割... 40
图像的亮度变换... 43
单通道图像的直方图... 46
计算和显示彩色图像的二维色调-饱和度图像... 48
图像的直方图均匀化... 50
用Hongh变换检测线段... 52
利用Hough变换检测圆(是圆不是椭圆)... 57
距离变换... 59
椭圆曲线拟合... 64
由点集序列或数组创建凸外形... 68
Delaunay三角形和Voronoi划分的迭代式构造... 71
利用背景建模检测运动物体(推荐)... 78
运动模板检测(摄像头)... 81
显示如何利用Camshift算法进行彩色目标的跟踪... 86
基于opencv的use摄像头视频采集程序
准备工作:你得把opencv库装到电脑上,并把各种头文件,源文件,lib库都连到vc上,然后设置一下系统环境变量,这里这方面就不说了,好像我前面的文章有说过,不懂也可百度一下。
建立一个基于WIN32控制台的工程CameraUSB,在新建一个c++元文件,写代码:
#include "cxcore.h"
#include "cvcam.h"
#include "windows.h"
#include "highgui.h"
void callback(IplImage* image);
int main()
{
int ncams=cvcamGetCamerasCount( );//返回可以访问的摄像头数目
HWND MyWin;
// 设置系统属性
cvcamSetProperty(0, CVCAM_PROP_ENABLE, CVCAMTRUE); //选择第一个摄像头
//camera
cvcamSetProperty(0, CVCAM_PROP_RENDER, CVCAMTRUE); //We'll render stream
// 在本例中
// 假设创建一个窗口,并且窗口的ID是在变量 MyWin 中定义
// MyWin 是窗口 HWND 的类型
MyWin=(HWND)cvGetWindowHandle("CameraUSB window");
cvcamSetProperty(0,CVCAM_PROP_WINDOW,&MyWin); // Selects a window for
//video rendering
//回调函数将处理每一帧
cvcamSetProperty(0,CVCAM_PROP_CALLBACK,callback);
cvcamInit( );
cvcamStart( );
// 现在程序开始工作
cvWaitKey(0);
cvcamStop( );
cvcamExit( );
return 0;
}
// 在图像中画兰色水平线
void callback(IplImage* image)
{
IplImage* image1 = image;
int i,j;
assert (image);
for(i=0; i
{
for(j=(image1->widthStep)*i; j<(image1->widthStep)*(i+1);
j+=image1->nChannels)
{
image1->imageData[j] = (char)255;
image1->imageData[j+1] = 0;
image1->imageData[j+2] = 0;
}
}
}
嘿嘿,就这么简单就完事了。
不懂可留言问
基于opencv的两个摄像头数据采集
实现功能:同时采集两路USB摄像头数据,并显示,具有图片保存功能(点击左键保存图片,并暂停视频;右键继续视频)。步骤就不说了,很简单,直接放代码了:
#include
#include
#include
#include "stdio.h"
#include
void StereoCallback(IplImage *frame1,IplImage *frame2);
void onMouse1(int Event,int x,int y,int flags,void *param);
void onMouse2(int Event,int x,int y,int flags,void *param);
IplImage *image1,*image2;
char *strleft[4]={"left1.bmp","left2.bmp","left3.bmp","left4.bmp"};
char *strright[4]={"right1.bmp","right2.bmp","right3.bmp","right4.bmp"};
void main()
{
HWND CaptureWindow1=0; //不赋值也行
HWND CaptureWindow2=0;
//int ncams=cvcamGetCamerasCount(); //获取摄像头的个数,在这里可有可无
//用对话框的形式来选取摄像头
int *CameraNumber;
int nSelected = cvcamSelectCamera(&CameraNumber);
/* //灰色图像
image1=cvCreateImage(cvSize(320,240),IPL_DEPTH_8U,1);
image2=cvCreateImage(cvSize(320,240),IPL_DEPTH_8U,1);
*/
//彩色图像
image1=cvCreateImage(cvSize(320,240),IPL_DEPTH_8U,3);
image2=cvCreateImage(cvSize(320,240),IPL_DEPTH_8U,3);
//初始化两个摄像头
cvNamedWindow("cvcam1 Window",1);
CaptureWindow1=(HWND)cvGetWindowHandle("cvcam1 Window");
cvcamSetProperty(CameraNumber[0], CVCAM_PROP_ENABLE, CVCAMTRUE);
cvcamSetProperty(CameraNumber[0], CVCAM_PROP_RENDER, CVCAMTRUE);
cvcamSetProperty(CameraNumber[0], CVCAM_PROP_WINDOW, &CaptureWindow1);
// cvSetMouseCallback("cvcam1 Window",onMouse1,0);
cvNamedWindow("cvcam2 Window",1);
CaptureWindow2=(HWND)cvGetWindowHandle("cvcam2 Window");
cvcamSetProperty(CameraNumber[1], CVCAM_PROP_ENABLE, CVCAMTRUE);
cvcamSetProperty(CameraNumber[1], CVCAM_PROP_RENDER, CVCAMTRUE);
cvcamSetProperty(CameraNumber[1], CVCAM_PROP_WINDOW, &CaptureWindow2);
// cvSetMouseCallback("cvcam2 Window",onMouse2,0);
//让两个摄像头同步
cvcamSetProperty(CameraNumber[0],CVCAM_STEREO_CALLBACK,(void*)&StereoCallback);
//启动程序
cvcamInit();
cvcamStart();
cvSetMouseCallback("cvcam1 Window",onMouse1,0);
cvSetMouseCallback("cvcam2 Window",onMouse2,0);
cvWaitKey(0);
cvcamStop();
free(CameraNumber);
cvcamExit();
cvDestroyWindow("cvcam1 Window");
cvDestroyWindow("cvcam2 Window");
}
void StereoCallback(IplImage* frame1,IplImage *frame2)
{
/* //把图像转换成灰度图并保存到image中
cvCvtColor(frame1,image1,CV_RGB2GRAY);
cvCvtColor(frame2,image2,CV_RGB2GRAY);
*/
//拷贝图像到全局变量image中 该函数这样用存在问题
// cvCopy(frame1,image1);
// cvCopy(frame2,image2);
image1=cvCloneImage(frame1);
image2=cvCloneImage(frame2);
//对截取的图像翻转
cvFlip(image1,image1,0);
cvFlip(image2,image2,0);
}
void onMouse1(int Event,int x,int y,int flags,void *param)
{
static int num=0;
if(Event==CV_EVENT_LBUTTONDOWN)
{
if(num==4)num=0;//只是固定定义了保存4张图片,为了不让程序非法而设置的复原
cvcamPause();
//图像保存
cvSaveImage(strleft[num],image1);
// cvSaveImage(strright[num],image2);
// cvSaveImage("left.bmp",image1);
// cvSaveImage("right.bmp",image2);
}
if(Event==CV_EVENT_RBUTTONDOWN)
{
cvcamResume();
num++;
}
}
void onMouse2(int Event,int x,int y,int flags,void *param)
{
static int num=0;
if(Event==CV_EVENT_LBUTTONDOWN)
{
if(num==4)num=0;//只是固定定义了保存4张图片,为了不让程序非法而设置的复原
cvcamPause();
//图像保存
// cvSaveImage(strleft[num],image1);
cvSaveImage(strright[num],image2);
// cvSaveImage("left.bmp",image1);
// cvSaveImage("right.bmp",image2);
}
if(Event==CV_EVENT_RBUTTONDOWN)
{
cvcamResume();
num++;
}
}
能激发你用代码做视频的冲动程序
这个程序是基于opencv的,连接库就不说了,直接建立一个基于win32的控制台程序,写代码就OK了。
/* 程序名:drawing..c
功能:展示OpenCV的图像绘制功能
*/
#include "cv.h"
#include "highgui.h"
#include
#include
#define NUMBER 100
#define DELAY 5
char wndname[] = "Drawing Demo";
CvScalar random_color(CvRNG* rng) //函数 cvRNG 初始化随机数生成器并返回其状态,RNG 随机数生成器
{
int icolor = cvRandInt(rng); //函数 cvRandInt 返回均匀分布的随机 32-bit 无符号整型值并更新 RNG 状态
return CV_RGB(icolor&255, (icolor>>8)&255, (icolor>>16)&255); //创建 一个色彩值
}
int main( int argc, char** argv )
{
int line_type = CV_AA; // change it to 8 to see non-antialiased graphics
int i;
CvPoint pt1,pt2; //基于二维整形坐标轴的点
double angle;
CvSize sz; //矩形框大小,以像素为精度
CvPoint ptt[6];
CvPoint* pt[2];
int arr[2];
CvFont font;
CvRNG rng;
int width = 1000, height = 700;
int width3 = width*3, height3 = height*3;
CvSize text_size;
int ymin = 0;
// Load the source image
IplImage* image = cvCreateImage( cvSize(width,height), 8, 3 );
IplImage* image2;
// Create a window
cvNamedWindow(wndname, 1 );
cvZero( image ); //#define cvZero cvSetZero void cvSetZero( CvArr* arr ); arr 要被清空数组
cvShowImage(wndname,image);
rng = cvRNG((unsigned)-1);
pt[0] = &(ptt[0]);
pt[1] = &(ptt[3]);
arr[0] = 3;
arr[1] = 3;
for (i = 0; i< NUMBER; i++)
{
pt1.x=cvRandInt(&rng) % width3 - width;
pt1.y=cvRandInt(&rng) % height3 - height;
pt2.x=cvRandInt(&rng) % width3 - width;
pt2.y=cvRandInt(&rng) % height3 - height;
cvLine( image, pt1, pt2, random_color(&rng), cvRandInt(&rng)%10, line_type, 0 );//绘制连接两个点的线段
cvShowImage(wndname,image);
cvWaitKey(DELAY);
}
for (i = 0; i< NUMBER; i++)
{
pt1.x=cvRandInt(&rng) % width3 - width;
pt1.y=cvRandInt(&rng) % height3 - height;
pt2.x=cvRandInt(&rng) % width3 - width;
pt2.y=cvRandInt(&rng) % height3 - height;
cvRectangle( image,pt1, pt2, random_color(&rng), cvRandInt(&rng)%10-1, line_type, 0 );//绘制简单、指定粗细或者带填充的 矩形
cvShowImage(wndname,image);
cvWaitKey(DELAY);
}
for (i = 0; i< NUMBER; i++)
{
pt1.x=cvRandInt(&rng) % width3 - width;
pt1.y=cvRandInt(&rng) % height3 - height;
sz.width =cvRandInt(&rng)%200;
sz.height=cvRandInt(&rng)%200;
angle = (cvRandInt(&rng)%1000)*0.180;
cvEllipse( image, pt1, sz, angle, angle - 100, angle + 200,
random_color(&rng), cvRandInt(&rng)%10-1, line_type, 0 );//函数cvEllipse用来绘制或者填充一个简单的椭圆弧或椭圆扇形
cvShowImage(wndname,image);
cvWaitKey(DELAY);
}
for (i = 0; i< NUMBER; i++)
{
pt[0][0].x=cvRandInt(&rng) % width3 - width;
pt[0][0].y=cvRandInt(&rng) % height3 - height;
pt[0][1].x=cvRandInt(&rng) % width3 - width;
pt[0][1].y=cvRandInt(&rng) % height3 - height;
pt[0][2].x=cvRandInt(&rng) % width3 - width;
pt[0][2].y=cvRandInt(&rng) % height3 - height;
pt[1][0].x=cvRandInt(&rng) % width3 - width;
pt[1][0].y=cvRandInt(&rng) % height3 - height;
pt[1][1].x=cvRandInt(&rng) % width3 - width;
pt[1][1].y=cvRandInt(&rng) % height3 - height;
pt[1][2].x=cvRandInt(&rng) % width3 - width;
pt[1][2].y=cvRandInt(&rng) % height3 - height;
cvPolyLine( image, pt, arr, 2, 1, random_color(&rng), cvRandInt(&rng)%10, line_type, 0 );//函数cvPolyLine 绘制一个简单的或多样的多角曲线
cvShowImage(wndname,image);
cvWaitKey(DELAY);
}
for (i = 0; i< NUMBER; i++)
{
pt[0][0].x=cvRandInt(&rng) % width3 - width;
pt[0][0].y=cvRandInt(&rng) % height3 - height;
pt[0][1].x=cvRandInt(&rng) % width3 - width;
pt[0][1].y=cvRandInt(&rng) % height3 - height;
pt[0][2].x=cvRandInt(&rng) % width3 - width;
pt[0][2].y=cvRandInt(&rng) % height3 - height;
pt[1][0].x=cvRandInt(&rng) % width3 - width;
pt[1][0].y=cvRandInt(&rng) % height3 - height;
pt[1][1].x=cvRandInt(&rng) % width3 - width;
pt[1][1].y=cvRandInt(&rng) % height3 - height;
pt[1][2].x=cvRandInt(&rng) % width3 - width;
pt[1][2].y=cvRandInt(&rng) % height3 - height;
cvFillPoly( image, pt, arr, 2, random_color(&rng), line_type, 0 );//函数cvFillPoly用于一个单独被多变形轮廓所限定的区域内进行填充
cvShowImage(wndname,image);
cvWaitKey(DELAY);
}
for (i = 0; i< NUMBER; i++)
{
pt1.x=cvRandInt(&rng) % width3 - width;
pt1.y=cvRandInt(&rng) % height3 - height;
cvCircle( image, pt1, cvRandInt(&rng)%300, random_color(&rng),
cvRandInt(&rng)%10-1, line_type, 0 );//函数cvCircle绘制或填充一个给定圆心和半径的圆
cvShowImage(wndname,image);
cvWaitKey(DELAY);
}
for (i = 1; i< NUMBER; i++)
{
pt1.x=cvRandInt(&rng) % width3 - width;
pt1.y=cvRandInt(&rng) % height3 - height;
cvInitFont( &font, cvRandInt(&rng) % 8,
(cvRandInt(&rng)%100)*0.05+0.1,
(cvRandInt(&rng)%100)*0.05+0.1,
(cvRandInt(&rng)%5)*0.1, cvRound(cvRandInt(&rng)%10),
line_type );//字体结构初始化。函数 cvRound, cvFloor, cvCeil 用一种舍入方法将输入浮点数转换成整数。 cvRound 返回和参数最接近的整数值
cvPutText( image, "Northeast Petroleum University!", pt1, &font, random_color(&rng));//在图像中加入文本
cvShowImage(wndname,image);
cvWaitKey(DELAY);
}
cvInitFont( &font, CV_FONT_HERSHEY_COMPLEX, 3, 3, 0.0, 5, line_type );
cvGetTextSize( "Opencv forever!", &font, &text_size, &ymin );//设置字符串文本的宽度和高度
pt1.x = (width - text_size.width)/2;
pt1.y = (height + text_size.height)/2;
image2 = cvCloneImage(image);
for( i = 0; i < 255; i++ )
{
cvSubS( image2, cvScalarAll(i), image, 0 );//函数 cvSubS 从原数组的每个元素中减去一个数量
cvPutText( image, "shentuhongfeng forever!", pt1, &font, CV_RGB(255,i,i));
cvShowImage(wndname,image);
cvWaitKey(DELAY);
}
// Wait for a key stroke; the same function arranges events processing
cvWaitKey(0);
cvReleaseImage(&image);
cvReleaseImage(&image2);
cvDestroyWindow(wndname);
return 0;
}
效果图:太帅了
图像反转(就是把黑的变白,白的变黑)
黑的变白了,白的变黑了
源码:
#include
#include
#include
#include
int main(int argc,char* argv[])
{
IplImage* img=0;
int height,width,step,channels;
UCHAR* data;
int i,j,k;
if(argc<2)
{
printf("Usage:InvImage
exit(0);
}
img=cvLoadImage(argv[1]);
if(!img)
{
printf("Could not load image file:%s\n",argv[1]);
exit(0);
}
height=img->height;
width=img->width;
step=img->widthStep;
channels=img->nChannels;
data=(UCHAR*)img->imageData;
printf("Processing a%d*%d image with %d channels\n",height,width,channels);
cvNamedWindow("mainWin",CV_WINDOW_AUTOSIZE);
cvMoveWindow("mainWin",100,100);
for(i=0;i
cvShowImage("mainWin",img);
cvWaitKey(0);
cvReleaseImage(&img);
return 0;
}
图像格式的转换
首先要准备一张图片,和几个txt文档,把txt文档的扩展名改成一个你要把图片转换成的格式
我用的原始图片是jpg的,txt改成bmp的
使用时,运行-cmd-cd 转到你的目录- Convert.exe 1.jpg 2.bmp 运行就能把图像1.jpg转换成2.bmp了
源码如下:
/* 程序名:convert.c
功能:图像格式的转换
*/
#include
#include
#include
int main( int argc, char** argv )
{
IplImage* src;
// -1: the loaded image will be loaded as is (with number of channels depends on the file).
if(argc != 3)
{
printf("CONV: Image format convertion, support JPG,BMP,TIF,PNG,PPM\n");
printf("Usage: conv srcImage dstImage\n");
return 0;
}
if( ( strstr(argv[1],".jpg")==NULL
&& strstr(argv[1],".bmp")==NULL
&& strstr(argv[1],".tif")==NULL
&& strstr(argv[1],".png")==NULL
&& strstr(argv[1],".ppm")==NULL )
|| ( strstr(argv[2],".jpg")==NULL
&& strstr(argv[2],".bmp")==NULL
&& strstr(argv[2],".tif")==NULL
&& strstr(argv[2],".png")==NULL
&& strstr(argv[2],".ppm")==NULL )) //strstr(a, b)的用法是不是在a数组内查看是否有b数组。。。没有则输出NULL
{
printf("WARNING: CONV only support JPG,BMP,TIF,PPM,TGA and PPM\n");
}
else {
if( (src=cvLoadImage(argv[1], -1))!= 0 ) {
cvSaveImage( argv[2], src);
cvReleaseImage(&src);
printf("\n Convert successfully.\n");
}
else
{
printf("\n*** Read or write image fails *** \n");
}
}
return 0;
}
发现了个小问题:
原来的jpg图像只有102KB转换成bmp后变成549KB ,在运行程序把这个bmp转成jpg又只有81KB。这真是汗死我了
从摄像头或者AVI文件中得到视频流,对视频流进行边缘检测
/*
程序名称:laplace.c
功能:从摄像头或者AVI文件中得到视频流,对视频流进行边缘检测,并输出结果。
*/
#include "cv.h"
#include "highgui.h"
#include
#include
int main( int argc, char** argv )
{
IplImage* laplace = 0;
IplImage* colorlaplace = 0;
IplImage* planes[3] = { 0, 0, 0 }; // 多个图像面
CvCapture* capture = 0;
// 下面的语句说明在命令行执行程序时,如果指定AVI文件,那么处理从
// AVI文件读取的视频流,如果不指定输入变量,那么处理从摄像头获取
// 的视频流
if( argc == 1 || (argc == 2 && strlen(argv[1]) == 1 && isdigit(argv[1][0])))
capture = cvCaptureFromCAM( argc == 2 ? argv[1][0] - '0' : 0 );
else if( argc == 2 )
capture = cvCaptureFromAVI( argv[1] );
if( !capture )
{
fprintf(stderr,"Could not initialize capturing...\n");
return -1;
}
cvNamedWindow( "Laplacian", 0 );
// 循环捕捉,直到用户按键跳出循环体
for(;;)
{
IplImage* frame = 0;
int i;
frame = cvQueryFrame( capture );
if( !frame )
break;
if( !laplace )
{
for( i = 0; i < 3; i++ )
planes[i] = cvCreateImage( cvSize(frame->width,frame->height), 8, 1 );
laplace = cvCreateImage( cvSize(frame->width,frame->height),
IPL_DEPTH_16S, 1 );
colorlaplace = cvCreateImage( cvSize(frame->width,frame->height), 8, 3 );
}
cvCvtPixToPlane( frame, planes[0], planes[1], planes[2], 0 );
for( i = 0; i < 3; i++ )
{
cvLaplace( planes[i], laplace, 3 ); // 3: aperture_size
cvConvertScaleAbs( laplace, planes[i], 1, 0 ); // planes[] = ABS(laplace)
}
cvCvtPlaneToPix( planes[0], planes[1], planes[2], 0, colorlaplace );
colorlaplace->origin = frame->origin;
cvShowImage("Laplacian", colorlaplace );
if( cvWaitKey(10) >= 0 )
break;
}
cvReleaseCapture( &capture );
cvDestroyWindow("Laplacian");
return 0;
}
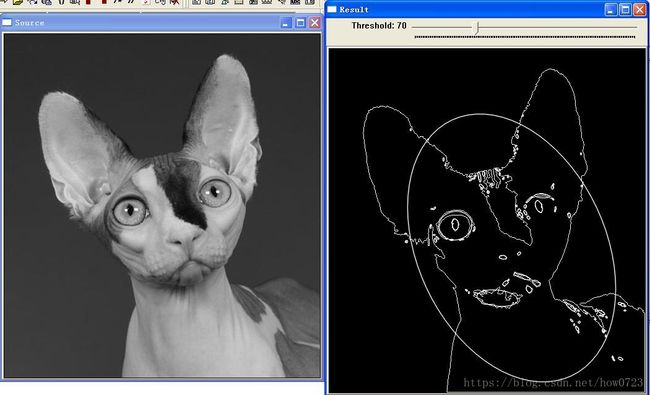
采用Canny算子进行边缘检测
#include "cv.h"
#include "highgui.h"
char wndname[] = "Edge";
char tbarname[] = "Threshold";
int edge_thresh = 1;
IplImage *image = 0, *cedge = 0, *gray = 0, *edge = 0;
// 定义跟踪条的 callback 函数
void on_trackbar(int h)
{
cvSmooth( gray, edge, CV_BLUR, 3, 3, 0 );
cvNot( gray, edge );
// 对灰度图像进行边缘检测
cvCanny(gray, edge, (float)edge_thresh, (float)edge_thresh*3, 3);
cvZero( cedge );
// copy edge points
cvCopy( image, cedge, edge );
// 显示图像
cvShowImage(wndname, cedge);
}
int main( int argc, char** argv )
{
char* filename = argc == 2 ? argv[1] : (char*)"fruits.jpg";
if( (image = cvLoadImage( filename, 1)) == 0 )
return -1;
// Create the output image
cedge = cvCreateImage(cvSize(image->width,image->height), IPL_DEPTH_8U, 3);
// 将彩色图像转换为灰度图像
gray = cvCreateImage(cvSize(image->width,image->height), IPL_DEPTH_8U, 1);
edge = cvCreateImage(cvSize(image->width,image->height), IPL_DEPTH_8U, 1);
cvCvtColor(image, gray, CV_BGR2GRAY);
// Create a window
cvNamedWindow(wndname, 1);
// create a toolbar
cvCreateTrackbar(tbarname, wndname, &edge_thresh, 100, on_trackbar);
// Show the image
on_trackbar(1);
// Wait for a key stroke; the same function arranges events processing
cvWaitKey(0);
cvReleaseImage(&image);
cvReleaseImage(&gray);
cvReleaseImage(&edge);
cvDestroyWindow(wndname);
return 0;
}
/*******代码中的函数说明
1、cvSmooth,其函数声明为:
cvSmooth( const void* srcarr, void* dstarr, int smoothtype,int param1, int param2, double param3 )
cvSmooth函数的作用是对图象做各种方法的图象平滑。其中,srcarr为输入图象;dstarr为输出图象;
param1为平滑操作的第一个参数;param2为平滑操作的第二个参数(如果param2值为0,则表示它被设为param1);
param3是对应高斯参数的标准差。
参数smoothtype是图象平滑的方法选择,主要的平滑方法有以下五种:
CV_BLUR_NO_SCALE:简单不带尺度变换的模糊,即对每个象素在 param1×param2领域求和。
CV_BLUR:对每个象素在param1×param2邻域求和并做尺度变换 1/(param1?param2)。
CV_GAUSSIAN:对图像进行核大小为param1×param2的高斯卷积。
CV_MEDIAN:对图像进行核大小为param1×param1 的中值滤波(邻域必须是方的)。
CV_BILATERAL:双向滤波,应用双向 3x3 滤波,彩色设置为param1,空间设置为param2。
2、void cvNot(const CvArr* src,CvArr* dst);
函数cvNot()会将src中的每一个元素的每一位取反,然后把结果赋给dst。
因此,一个值为0x00的8位图像将被映射到0xff,而值为0x83的图像将被映射到0x7c。
3、void cvCanny( const CvArr* image, CvArr* edges, double threshold1,double threshold2, int aperture_size=3 );
采用 Canny 算法做边缘检测
image
输入图像
edges
输出的边缘图像
threshold1
第一个阈值
threshold2
第二个阈值
aperture_size
Sobel 算子内核大小
4、void cvCopy( const CvArr* src, CvArr* dst, const CvArr* mask=NULL );
在使用这个函数之前,你必须用cvCreateImage()一类的函数先开一段内存,然后传递给dst。
cvCopy会把src中的数据复制到dst的内存中。
5、cvCreateTrackbar
创建trackbar并将它添加到指定的窗口。
int cvCreateTrackbar( const char* trackbar_name, const char* window_name,
int* value, int count, CvTrackbarCallback on_change );
trackbar_name
被创建的trackbar名字。
window_name
窗口名字,这个窗口将为被创建trackbar的父对象。
value
整数指针,它的值将反映滑块的位置。这个变量指定创建时的滑块位置。
count
滑块位置的最大值。最小值一直是0。
on_change
每次滑块位置被改变的时候,被调用函数的指针。这个函数应该被声明为void Foo(int);
如果没有回调函数,这个值可以设为NULL。
函数cvCreateTrackbar用指定的名字和范围来创建trackbar(滑块或者范围控制),指定与trackbar位置同步的变量,
并且指定当trackbar位置被改变的时候调用的回调函数。被创建的trackbar显示在指定窗口的顶端。
*/
角点检测
原始图:
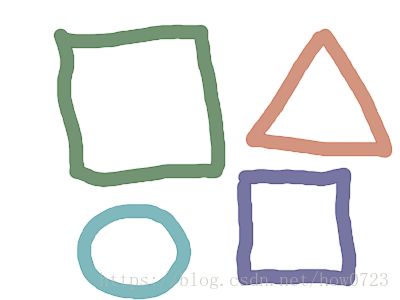
处理后图:
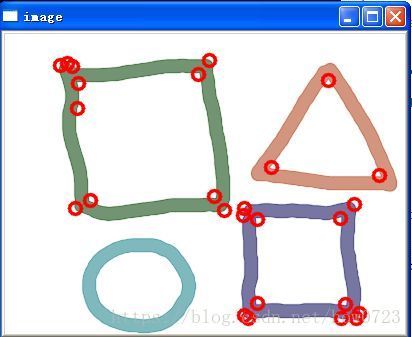
源代码:
#include
#include "cv.h"
#include "highgui.h"
#define max_corners 100
int main( int argc, char** argv )
{
int cornerCount=max_corners;
CvPoint2D32f corners[max_corners];
IplImage *srcImage = 0, *grayImage = 0, *corners1 = 0, *corners2 = 0;
int i;
CvScalar color = CV_RGB(255,0,0);
char* filename = argc == 2 ? argv[1] : (char*)"pic3.png"; // 注意相对路径
cvNamedWindow( "image", 1 ); // create HighGUI window with name "image"
//Load the image to be processed
srcImage = cvLoadImage(filename, 1);
grayImage = cvCreateImage(cvGetSize(srcImage), IPL_DEPTH_8U, 1);
//copy the source image to copy image after converting the format
cvCvtColor(srcImage, grayImage, CV_BGR2GRAY);
//create empty images of same size as the copied images
corners1= cvCreateImage(cvGetSize(srcImage), IPL_DEPTH_32F, 1);
corners2= cvCreateImage(cvGetSize(srcImage),IPL_DEPTH_32F, 1);
cvGoodFeaturesToTrack (grayImage, corners1,
corners2, corners,
&cornerCount, 0.05,
5,
0,
3, // block size
0, // not use harris
0.4 );
printf("num corners found: %d\n", cornerCount);
// draw circles at each corner location in the gray image and
//print out a list the corners
if(cornerCount>0)
{
for (i=0; i
cvCircle(srcImage, cvPoint((int)(corners[i].x), (int)(corners[i].y)), 6,
color, 2, CV_AA, 0);
}
}
cvShowImage( "image", srcImage );
cvReleaseImage(&srcImage);
cvReleaseImage(&grayImage);
cvReleaseImage(&corners1);
cvReleaseImage(&corners2);
cvWaitKey(0); // wait for key. The function has
return 0;
}
友情链接一下,这是别人写的:
http://hi.baidu.com/xiaoduo170/blog/item/2816460175c8330779ec2c64.html
图像的旋转加缩放(效果很拽,用地球做就像谷歌地球似的)
#include "cv.h"
#include "highgui.h"
#include "math.h"
int main( int argc, char** argv )
{
IplImage* src;
/* the first command line parameter must be image file name */
if( argc==2 && (src = cvLoadImage(argv[1], -1))!=0)
{
IplImage* dst = cvCloneImage( src );
int delta = 1;
int angle = 0;
int opt = 1; // 1: 旋转加缩放
// 0: 仅仅旋转
double factor;
cvNamedWindow( "src", 1 );
cvShowImage( "src", src );
for(;;)
{
float m[6];
// Matrix m looks like:
//
// [ m0 m1 m2 ] ===> [ A11 A12 b1 ]
// [ m3 m4 m5 ] [ A21 A22 b2 ]
//
CvMat M = cvMat( 2, 3, CV_32F, m );
int w = src->width;
int h = src->height;
if(opt) // 旋转加缩放
factor = (cos(angle*CV_PI/180.) + 1.05)*2;
else // 仅仅旋转
factor = 1;
m[0] = (float)(factor*cos(-angle*2*CV_PI/180.));
m[1] = (float)(factor*sin(-angle*2*CV_PI/180.));
m[3] = -m[1];
m[4] = m[0];
// 将旋转中心移至图像中间
m[2] = w*0.5f;
m[5] = h*0.5f;
// dst(x,y) = A * src(x,y) + b
cvGetQuadrangleSubPix( src, dst, &M);//提取象素四边形,使用子象素精度
cvNamedWindow( "dst", 1 );
cvShowImage( "dst", dst );
if( cvWaitKey(5) == 27 )
break;
angle =(int) (angle + delta) % 360;
} // for-loop
}
return 0;
}
Log-Polar极坐标变换
原始图:

效果图:(正变换)

反变换:
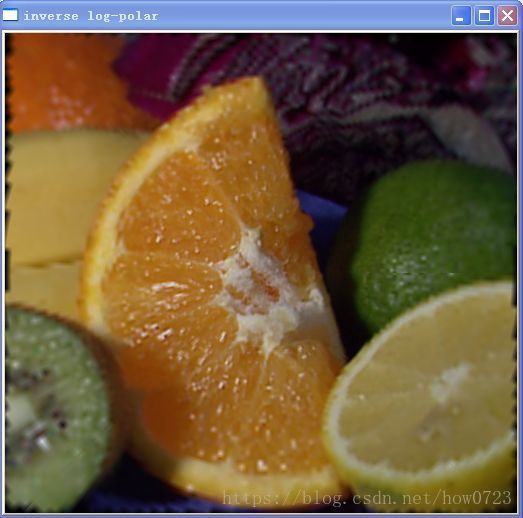
正反变换只是函数中一个参数的不同,具体看你所需要的应用。
cvLogPolar函数可以用来模拟人类的中央视觉(foveal vision),并可以用于物体跟踪方面的尺度及旋转不变模板的快速匹配。
源代码:
#include
#include
int main(int argc, char** argv)
{
IplImage* src;
if( argc == 2 && (src=cvLoadImage(argv[1],1)) != 0 )
{
IplImage* dst = cvCreateImage( cvSize(256,256), 8, 3 );
IplImage* src2 = cvCreateImage( cvGetSize(src), 8, 3 );
cvLogPolar( src, dst, cvPoint2D32f(src->width/2,src->height/2), 40, CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS );
cvLogPolar( dst, src2, cvPoint2D32f(src->width/2,src->height/2), 40, CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS+CV_WARP_INVERSE_MAP );
cvNamedWindow( "log-polar", 1 );
cvShowImage( "log-polar", dst );
cvNamedWindow( "inverse log-polar", 1 );
cvShowImage( "inverse log-polar", src2 );
cvWaitKey();
}
return 0;
}
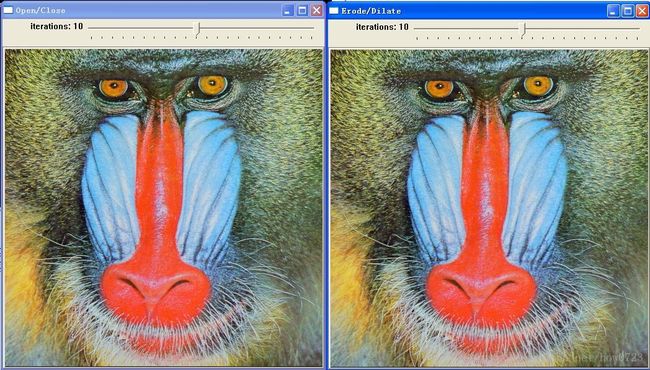
对图像进行形态学操作(图像的开闭,腐蚀和膨胀运算)
效果图:(什么东东长这么丑啊,汗)
#include
#include
#include
#include
IplImage* src = 0;
IplImage* dst = 0;
IplConvKernel* element = 0;
int element_shape = CV_SHAPE_RECT;
//the address of variable which receives trackbar position update
int max_iters = 10;
int open_close_pos = 0;
int erode_dilate_pos = 0;
// callback function for open/close trackbar
void OpenClose(int pos)
{
int n = open_close_pos - max_iters;
int an = n > 0 ? n : -n;
element = cvCreateStructuringElementEx( an*2+1, an*2+1, an, an, element_shape, 0 );
if( n < 0 )
{
cvErode(src,dst,element,1);
cvDilate(dst,dst,element,1);
}
else
{
cvDilate(src,dst,element,1);
cvErode(dst,dst,element,1);
}
cvReleaseStructuringElement(&element);
cvShowImage("Open/Close",dst);
}
// callback function for erode/dilate trackbar
void ErodeDilate(int pos)
{
int n = erode_dilate_pos - max_iters;
int an = n > 0 ? n : -n;
element = cvCreateStructuringElementEx( an*2+1, an*2+1, an, an, element_shape, 0 );
if( n < 0 )
{
cvErode(src,dst,element,1);
}
else
{
cvDilate(src,dst,element,1);
}
cvReleaseStructuringElement(&element);
cvShowImage("Erode/Dilate",dst);
}
int main( int argc, char** argv )
{
char* filename = argc == 2 ? argv[1] : (char*)"baboon.jpg";
if( (src = cvLoadImage(filename,1)) == 0 )
return -1;
printf( "Hot keys: \n"
"\tESC - quit the program\n"
"\tr - use rectangle structuring element\n"
"\te - use elliptic structuring element\n"
"\tc - use cross-shaped structuring element\n"
"\tENTER - loop through all the options\n" );
dst = cvCloneImage(src);
//create windows for output images
cvNamedWindow("Open/Close",1);
cvNamedWindow("Erode/Dilate",1);
open_close_pos = erode_dilate_pos = max_iters;
cvCreateTrackbar("iterations", "Open/Close",&open_close_pos,max_iters*2+1,OpenClose);
cvCreateTrackbar("iterations", "Erode/Dilate",&erode_dilate_pos,max_iters*2+1,ErodeDilate);
for(;;)
{
int c;
OpenClose(open_close_pos);
ErodeDilate(erode_dilate_pos);
c = cvWaitKey(0);
if( (char)c == 27 )
break;
if( (char)c == 'e' )
element_shape = CV_SHAPE_ELLIPSE;
else if( (char)c == 'r' )
element_shape = CV_SHAPE_RECT;
else if( (char)c == 'c' )
element_shape = CV_SHAPE_CROSS;
else if( (char)c == '\n' )
element_shape = (element_shape + 1) % 3;
}
//release images
cvReleaseImage(&src);
cvReleaseImage(&dst);
//destroy windows
cvDestroyWindow("Open/Close");
cvDestroyWindow("Erode/Dilate");
return 0;
}
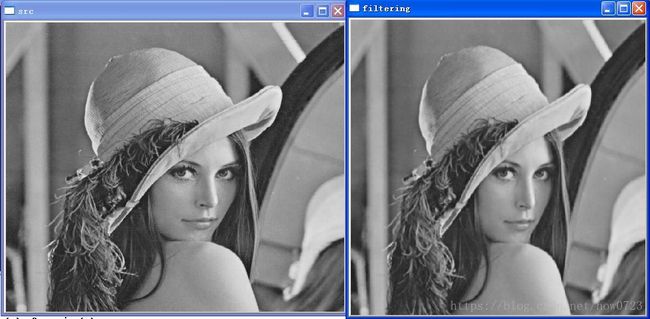
用不同的核进行图像的二维滤波
函数cvSmooth实现各种方法的图形平滑。
一般来说,图像平滑主要是为了消除噪声。图像的常见噪声主要有加性噪声、乘性噪声和量化噪声等。由于图像的能量主要集在低频部分,而噪声所在频段主要在高频段,因此通常都是采用低通滤波的方法消除噪声。
函数cvFilter2D对图像做卷积运算。
对图像进行线性滤波,支持替换方式操作。当核运算部份超出输入图像时,边界外面的像素值等于离它最近的图像像素值。
效果图:
源代码:
// Filtering for Image with variaty filtering kernel
//
// CV_PREWITT_3x3_V A gradient filter (vertical Prewitt operator).
// -1 0 1
// -1 0 1
// -1 0 1
// CV_PREWITT_3x3_H A gradient filter (horizontal Prewitt operator).
// 1 1 1
// 0 0 0
// -1 -1 -1
// CV_SOBEL_3x3_V A gradient filter (vertical Sobel operator).
// -1 0 1
// -2 0 2
// -1 0 1
// CV_SOBEL_3x3_H A gradient filter (horizontal Sobel operator).
// 1 2 1
// 0 0 0
// -1 -2 -1
// CV_LAPLACIAN_3x3 A 3x3 Laplacian highpass filter.
// -1 -1 -1
// -1 8 -1
// -1 -1 -1
// CV_LAPLACIAN_3x3 A 3x3 Laplacian highpass filter (another kernel)
// This kernel is similar with function: cvLaplace with aperture_size=1
// 0 1 0
// 1 -4 1
// 0 1 0 注:直接用cvFilter2D得到的结果与用cvLaplace得到的结果
// 略有不同
// CV_LAPLACIAN_5x5 A 5x5 Laplacian highpass filter.
// -1 -3 -4 -3 -1
// -3 0 6 0 -3
// -4 6 20 6 -4
// -3 0 6 0 -3
// -1 -3 -4 -3 -1
// CV_GAUSSIAN_3x3 A 3x3 Gaussian lowpass filter.
// This filter uses the kernel A/16,where
// 1 2 1
// A = 2 4 2
// 1 2 1
// These filter coefficients correspond to a 2-dimensional Gaussian
// distribution with standard deviation 0.85.
//
// CV_GAUSSIAN_5x5 A 5x5 Gaussian lowpass filter.
// This filter uses the kernel A/571,where
// 2 7 12 7 2
// 7 31 52 31 7
// A = 12 52 127 52 12
// 7 31 52 31 7
// 2 7 12 7 2
#include
#include
#include
int main( int argc, char** argv )
{
IplImage *src = 0, *dst = 0, *dst2 = 0;
/*float k[9] = { 0, 1, 0,
1,-4, 1,
0, 1, 0}; */
float k[9] = { 1.f/16, 2.f/16, 1.f/16,
2.f/16, 4.f/16, 2.f/16,
1.f/16, 2.f/16, 1.f/16}; // 这里高斯核滤波器归一化
CvMat Km;
//cvInitMatHeader( &Km, 3, 3, CV_32FC1, k, CV_AUTOSTEP );
Km = cvMat( 3, 3, CV_32F, k );
// 0: force to gray image
src = cvLoadImage("lena.jpg", 0);
dst = cvCloneImage( src );
cvNamedWindow("src", 0);
cvShowImage("src",src);
cvNamedWindow("filtering", 0);
cvFilter2D( src, dst, &Km, cvPoint(-1,-1));
cvShowImage("filtering",dst);
cvWaitKey(0);
cvReleaseImage( &src );
cvReleaseImage( &dst );
return 0;
}
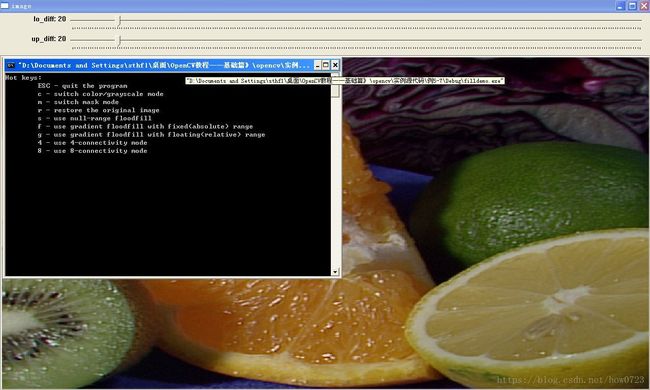
图像域的填充
效果图:
源代码:
#include "cv.h"
#include "highgui.h"
#include
#include
IplImage* color_img0;
IplImage* mask;
IplImage* color_img;
IplImage* gray_img0 = NULL;
IplImage* gray_img = NULL;
int ffill_case = 1;
int lo_diff = 20, up_diff = 20;
int connectivity = 4;
int is_color = 1;
int is_mask = 0;
int new_mask_val = 255;
void on_mouse( int event, int x, int y, int flags, void* param )
{
if( !color_img )
return;
switch( event )
{
case CV_EVENT_LBUTTONDOWN:
{
CvPoint seed = cvPoint(x,y);
int lo = ffill_case == 0 ? 0 : lo_diff;
int up = ffill_case == 0 ? 0 : up_diff;
int flags = connectivity + (new_mask_val << 8) +
(ffill_case == 1 ? CV_FLOODFILL_FIXED_RANGE : 0);
int b = rand() & 255, g = rand() & 255, r = rand() & 255;
CvConnectedComp comp;
if( is_mask )
cvThreshold( mask, mask, 1, 128, CV_THRESH_BINARY );
if( is_color )
{
CvScalar color = CV_RGB( r, g, b );
cvFloodFill( color_img, seed, color, CV_RGB( lo, lo, lo ),
CV_RGB( up, up, up ), &comp, flags, is_mask ? mask : NULL );
cvShowImage( "image", color_img );
}
else
{
CvScalar brightness = cvRealScalar((r*2 + g*7 + b + 5)/10);
cvFloodFill( gray_img, seed, brightness, cvRealScalar(lo),
cvRealScalar(up), &comp, flags, is_mask ? mask : NULL );
cvShowImage( "image", gray_img );
}
printf("%g pixels were repainted\n", comp.area );
if( is_mask )
cvShowImage( "mask", mask );
}
break;
}
}
int main( int argc, char** argv )
{
char* filename = argc >= 2 ? argv[1] : (char*)"fruits.jpg";
if( (color_img0 = cvLoadImage(filename,1)) == 0 )
return 0;
printf( "Hot keys: \n"
"\tESC - quit the program\n"
"\tc - switch color/grayscale mode\n"
"\tm - switch mask mode\n"
"\tr - restore the original image\n"
"\ts - use null-range floodfill\n"
"\tf - use gradient floodfill with fixed(absolute) range\n"
"\tg - use gradient floodfill with floating(relative) range\n"
"\t4 - use 4-connectivity mode\n"
"\t8 - use 8-connectivity mode\n" );
color_img = cvCloneImage( color_img0 );
gray_img0 = cvCreateImage( cvSize(color_img->width, color_img->height), 8, 1 );
cvCvtColor( color_img, gray_img0, CV_BGR2GRAY );
gray_img = cvCloneImage( gray_img0 );
mask = cvCreateImage( cvSize(color_img->width + 2, color_img->height + 2), 8, 1 );
cvNamedWindow( "image", 0 );
cvCreateTrackbar( "lo_diff", "image", &lo_diff, 255, NULL );
cvCreateTrackbar( "up_diff", "image", &up_diff, 255, NULL );
cvSetMouseCallback( "image", on_mouse, 0 );
for(;;)
{
int c;
if( is_color )
cvShowImage( "image", color_img );
else
cvShowImage( "image", gray_img );
c = cvWaitKey(0);
switch( (char) c )
{
case '\x1b':
printf("Exiting ...\n");
goto exit_main;
case 'c':
if( is_color )
{
printf("Grayscale mode is set\n");
cvCvtColor( color_img, gray_img, CV_BGR2GRAY );
is_color = 0;
}
else
{
printf("Color mode is set\n");
cvCopy( color_img0, color_img, NULL );
cvZero( mask );
is_color = 1;
}
break;
case 'm':
if( is_mask )
{
cvDestroyWindow( "mask" );
is_mask = 0;
}
else
{
cvNamedWindow( "mask", 0 );
cvZero( mask );
cvShowImage( "mask", mask );
is_mask = 1;
}
break;
case 'r':
printf("Original image is restored\n");
cvCopy( color_img0, color_img, NULL );
cvCopy( gray_img0, gray_img, NULL );
cvZero( mask );
break;
case 's':
printf("Simple floodfill mode is set\n");
ffill_case = 0;
break;
case 'f':
printf("Fixed Range floodfill mode is set\n");
ffill_case = 1;
break;
case 'g':
printf("Gradient (floating range) floodfill mode is set\n");
ffill_case = 2;
break;
case '4':
printf("4-connectivity mode is set\n");
connectivity = 4;
break;
case '8':
printf("8-connectivity mode is set\n");
connectivity = 8;
break;
}
}
exit_main:
cvDestroyWindow( "test" );
cvReleaseImage( &gray_img );
cvReleaseImage( &gray_img0 );
cvReleaseImage( &color_img );
cvReleaseImage( &color_img0 );
cvReleaseImage( &mask );
return 1;
}
寻找轮廓实现视频流的运动目标检测(超推荐一下)
效果视频我上传了,浏览网址(个人感觉很牛,有点像生化危机里的一个场景):
http://tinypic.com/m/a2epo8/2
如果上面的卡,可以连这个,就是有点发散图形:
http://i41.tinypic.com/54xcsm.jpg
也不说什么了,直接给代码吧(有一句话想说,实际上如果你是拿来做实际项目的,可能并不要学习里面的算法,直接利用里面的模板,也就是外接的调用函数就可以了):
#include "cv.h"
#include "highgui.h"
#include
#include
#include
#include
#include
// various tracking parameters (in seconds)
const double MHI_DURATION = 0.5;
const double MAX_TIME_DELTA = 0.5;
const double MIN_TIME_DELTA = 0.05;
const int N = 3;
//
const int CONTOUR_MAX_AERA = 16;
// ring image buffer
IplImage **buf = 0;
int last = 0;
// temporary images
IplImage *mhi = 0; // MHI: motion history image
CvFilter filter = CV_GAUSSIAN_5x5;
CvConnectedComp *cur_comp, min_comp;
CvConnectedComp comp;
CvMemStorage *storage;
CvPoint pt[4];
// 参数:
// img – 输入视频帧
// dst – 检测结果
void update_mhi( IplImage* img, IplImage* dst, int diff_threshold )
{
double timestamp = clock()/100.; // get current time in seconds
CvSize size = cvSize(img->width,img->height); // get current frame size
int i, j, idx1, idx2;
IplImage* silh;
uchar val;
float temp;
IplImage* pyr = cvCreateImage( cvSize((size.width & -2)/2, (size.height & -2)/2), 8, 1 );
CvMemStorage *stor;
CvSeq *cont, *result, *squares;
CvSeqReader reader;
if( !mhi || mhi->width != size.width || mhi->height != size.height )
{
if( buf == 0 )
{
buf = (IplImage**)malloc(N*sizeof(buf[0]));
memset( buf, 0, N*sizeof(buf[0]));
}
for( i = 0; i < N; i++ )
{
cvReleaseImage( &buf[i] );
buf[i] = cvCreateImage( size, IPL_DEPTH_8U, 1 );
cvZero( buf[i] );
}
cvReleaseImage( &mhi );
mhi = cvCreateImage( size, IPL_DEPTH_32F, 1 );
cvZero( mhi ); // clear MHI at the beginning
} // end of if(mhi)
cvCvtColor( img, buf[last], CV_BGR2GRAY ); // convert frame to grayscale
idx1 = last;
idx2 = (last + 1) % N; // index of (last - (N-1))th frame
last = idx2;
// 做帧差
silh = buf[idx2];
cvAbsDiff( buf[idx1], buf[idx2], silh ); // get difference between frames
// 对差图像做二值化
cvThreshold( silh, silh, 30, 255, CV_THRESH_BINARY ); // and threshold it
cvUpdateMotionHistory( silh, mhi, timestamp, MHI_DURATION ); // update MHI
cvCvtScale( mhi, dst, 255./MHI_DURATION,
(MHI_DURATION - timestamp)*255./MHI_DURATION );
cvCvtScale( mhi, dst, 255./MHI_DURATION, 0 );
// 中值滤波,消除小的噪声
cvSmooth( dst, dst, CV_MEDIAN, 3, 0, 0, 0 );
// 向下采样,去掉噪声
cvPyrDown( dst, pyr, 7 );
cvDilate( pyr, pyr, 0, 1 ); // 做膨胀操作,消除目标的不连续空洞
cvPyrUp( pyr, dst, 7 );
//
// 下面的程序段用来找到轮廓
//
// Create dynamic structure and sequence.
stor = cvCreateMemStorage(0);
cont = cvCreateSeq(CV_SEQ_ELTYPE_POINT, sizeof(CvSeq), sizeof(CvPoint) , stor);
// 找到所有轮廓
cvFindContours( dst, stor, &cont, sizeof(CvContour),
CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE, cvPoint(0,0));
/*
for(;cont;cont = cont->h_next)
{
// Number point must be more than or equal to 6 (for cvFitEllipse_32f).
if( cont->total < 6 )
continue;
// Draw current contour.
cvDrawContours(img,cont,CV_RGB(255,0,0),CV_RGB(255,0,0),0,1, 8, cvPoint(0,0));
} // end of for-loop: "cont"
*/
// 直接使用CONTOUR中的矩形来画轮廓
for(;cont;cont = cont->h_next)
{
CvRect r = ((CvContour*)cont)->rect;
if(r.height * r.width > CONTOUR_MAX_AERA) // 面积小的方形抛弃掉
{
cvRectangle( img, cvPoint(r.x,r.y),
cvPoint(r.x + r.width, r.y + r.height),
CV_RGB(255,0,0), 1, CV_AA,0);
}
}
// free memory
cvReleaseMemStorage(&stor);
cvReleaseImage( &pyr );
}
int main(int argc, char** argv)
{
IplImage* motion = 0;
CvCapture* capture = 0; //视频获取结构
if( argc == 1 || (argc == 2 && strlen(argv[1]) == 1 && isdigit(argv[1][0])))
//原型:extern int isdigit(char c);
//用法:#include
capture = cvCaptureFromCAM( argc == 2 ? argv[1][0] - '0' : 0 );
else if( argc == 2 )
capture = cvCaptureFromAVI( argv[1] );
if( capture )
{
cvNamedWindow( "Motion", 1 );
for(;;)
{
IplImage* image;
if( !cvGrabFrame( capture )) //从摄像头或者视频文件中抓取帧
break;
image = cvRetrieveFrame( capture ); //取回由函数cvGrabFrame抓取的图像,返回由函数cvGrabFrame 抓取的图像的指针
if( image )
{
if( !motion )
{
motion = cvCreateImage( cvSize(image->width,image->height), 8, 1 );
cvZero( motion );
motion->origin = image->origin; ///* 0 - 顶—左结构, 1 - 底—左结构 (Windows bitmaps 风格) */
}
}
update_mhi( image, motion, 60 );
cvShowImage( "Motion", image );
if( cvWaitKey(10) >= 0 )
break;
}
cvReleaseCapture( &capture );
cvDestroyWindow( "Motion" );
}
return 0;
}
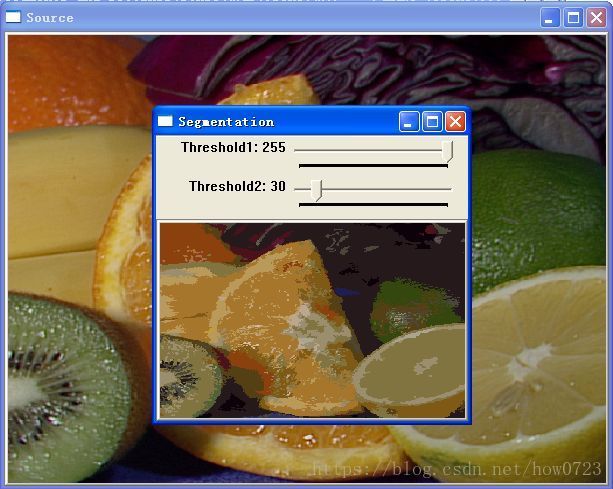
采用金字塔方法进行图像分割
图像分割指的是将数字图像细分为多个图像子区域的过程,在OpenCv中实现了三种跟图像分割相关的算法,它们分别是:分水岭分割算法、金字塔分割算法以及均值漂移分割算法。
分水岭分割算法
分水岭分割算法需要您或者先前算法提供标记,该标记用于指定哪些大致区域是目标,哪些大致区域是背景等等;分水岭分割算法的分割效果严重依赖于提供的标记。OpenCv中的函数cvWatershed实现了该算法
金字塔分割算法
金字塔分割算法由cvPrySegmentation所实现,该函数的使用很简单;需要注意的是图像的尺寸以及金字塔的层数,图像的宽度和高度必须能被2整除,能够被2整除的次数决定了金字塔的最大层数
均值漂移分割算法
均值漂移分割算法由cvPryMeanShiftFiltering所实现,均值漂移分割的金字塔层数只能介于[1,7]之间
友情链接一下,个人感觉比较好的这方面博客:
http://www.cnblogs.com/xrwang/archive/2010/02/28/ImageSegmentation.html
效果图:
#include "cv.h"
#include "highgui.h"
#include
IplImage* image[2] = { 0, 0 }, *image0 = 0, *image1 = 0;
CvSize size;
int w0, h0,i;
int threshold1, threshold2;
int l,level = 4;
int sthreshold1, sthreshold2;
int l_comp;
int block_size = 1000;
float parameter;
double threshold;
double rezult, min_rezult;
CvFilter filter = CV_GAUSSIAN_5x5;
CvConnectedComp *cur_comp, min_comp;
CvSeq *comp;
CvMemStorage *storage;
CvPoint pt1, pt2;
void ON_SEGMENT(int a)
{
cvPyrSegmentation(image0, image1, storage, &comp,
level, threshold1+1, threshold2+1);
/*l_comp = comp->total;
i = 0;
min_comp.value = cvScalarAll(0);
while(i
cur_comp = (CvConnectedComp*)cvGetSeqElem ( comp, i );
if(fabs(255- min_comp.value.val[0])>
fabs(255- cur_comp->value.val[0]) &&
fabs(min_comp.value.val[1])>
fabs(cur_comp->value.val[1]) &&
fabs(min_comp.value.val[2])>
fabs(cur_comp->value.val[2]) )
min_comp = *cur_comp;
i++;
}*/
cvShowImage("Segmentation", image1);
}
int main( int argc, char** argv )
{
char* filename = argc == 2 ? argv[1] : (char*)"fruits.jpg";
if( (image[0] = cvLoadImage( filename, 1)) == 0 )
return -1;
cvNamedWindow("Source", 0);
cvShowImage("Source", image[0]);
cvNamedWindow("Segmentation", 0);
storage = cvCreateMemStorage ( block_size );
image[0]->width &= -(1< image0 = cvCloneImage( image[0] ); ON_SEGMENT(1); sthreshold1 = cvCreateTrackbar("Threshold1", "Segmentation", &threshold1, 255, cvShowImage("Segmentation", image1); cvDestroyWindow("Segmentation"); cvReleaseMemStorage(&storage ); cvReleaseImage(&image[0]); return 0; 郁闷,以前用过MatLab,很长时间没用了,都不知道怎么使了,据说做这个效果很不错。 效果图: 源代码: #include "cv.h" int x,y; // intensity transform int main( int argc, char** argv ) cvDestroyWindow("src"); 原始图: 效果图: 源代码: #include "cv.h" int main( int argc, char** argv ) cvDestroyWindow("src"); 对这篇内容很郁闷,不知道以后用来干什么,声明一下,哥不是搞图像处理的。(业余爱好) 效果图:(好好的一张图,给处理成人不像人,鬼不像鬼) #include int main( int argc, char** argv ) cvCvtColor( src, hsv, CV_BGR2HSV ); for( h = 0; h < h_bins; h++ ) 直方图均衡化算法可以归一化图像的亮度,并增强图像的对比度 效果图: 源代码: #include "cv.h" #define HDIM 256 // bin of HIST, default = 256 int main( int argc, char** argv ) // 归一化直方图 // Using look-up table to perform intensity transform for source image cvShowImage( "source", src ); cvDestroyWindow("source"); 效果图(郁闷这么和我想的不一样啊,这是什么东东): 这幅还像点东东: 源代码: /* 这是一个命令行程序,以图像作为文件输入变量 int main(int argc, char** argv) for( i = 0; i < lines->total; i++ ) cvNamedWindow( "Hough", 1 ); cvWaitKey(0); 原始图: 效果图: 汗,不是到那个小圆是不是圆,怎么没检测出来,我的东东,怎么搞的 源代码: #include int main(int argc, char** argv) 原图: 处理后的图: 没搞明白这是怎么个距离变换,连图都不一样了这么还叫距离变换,望知道这不剩赐教。 源代码: #include "cv.h" char wndname[] = "Distance transform"; // The output and temporary images IplImage* gray = 0; // threshold trackbar callback cvThreshold( gray, edge, (float)edge_thresh, (float)edge_thresh, CV_THRESH_BINARY ); if( build_voronoi ) cvDistTransform( edge, dist, CV_DIST_L2, msize, NULL, build_voronoi ? labels : NULL ); if( !build_voronoi ) int main( int argc, char** argv ) if( (gray = cvLoadImage( filename, 0 )) == 0 ) printf( "Hot keys: \n" dist = cvCreateImage( cvGetSize(gray), IPL_DEPTH_32F, 1 ); cvNamedWindow( wndname, 1 ); cvCreateTrackbar( tbarname, wndname, &edge_thresh, 255, on_trackbar ); for(;;) c = cvWaitKey(0); if( (char)c == 27 ) if( (char)c == '3' ) cvReleaseImage( &gray ); 程序首先发现图像轮廓,然后用椭圆逼近它 效果图: 还是用ps的魔棒工具感觉更好。 源代码: #include "cv.h" int slider_pos = 70; IplImage *image02 = 0, *image03 = 0, *image04 = 0; int main( int argc, char** argv ) // Create the destination images // Create windows. // Show the image. // Create toolbars. HighGUI use. process_image(0); // Wait for a key stroke; the same function arranges events processing cvDestroyWindow("Source"); return 0; // Define trackbar callback functon. This function find contours, 不过说 看效果图就能明白原理: 源代码: #include "cv.h" #define ARRAY 0 /* switch between array/sequence method by replacing 0<=>1 */ int main( int argc, char** argv ) #if !ARRAY for(;;) for( i = 0; i < count; i++ ) for( i = 0; i < count; i++ ) #if !ARRAY for( i = 0; i < hullcount; i++ ) cvShowImage( "hull", img ); int key = cvWaitKey(0); #if !ARRAY 汗,这题目,我都晕了,什么东东呢。 效果图:(实际是个动画一样的东东,最终效果我截下了) 很欣赏这种main函数的写法,就两句,精辟,嘿嘿 源代码: #include "cv.h" /* the script demostrates iterative construction of CvSubdiv2D* init_delaunay( CvMemStorage* storage, subdiv = cvCreateSubdiv2D( CV_SEQ_KIND_SUBDIV2D, sizeof(*subdiv), return subdiv; org_pt = cvSubdiv2DEdgeOrg(edge); if( org_pt && dst_pt ) iorg = cvPoint( cvRound( org.x ), cvRound( org.y )); cvLine( img, iorg, idst, color, 1, CV_AA, 0 ); cvStartReadSeq( (CvSeq*)(subdiv->edges), &reader, 0 ); for( i = 0; i < total; i++ ) if( CV_IS_SET_ELEM( edge )) CV_NEXT_SEQ_ELEM( elem_size, reader ); cvSubdiv2DLocate( subdiv, fp, &e0, &p ); if( e0 ) draw_subdiv_point( img, fp, active_color ); // count number of edges in facet buf = (CvPoint*)malloc( count * sizeof(buf[0])); // gather points if( i == count ) void paint_voronoi( CvSubdiv2D* subdiv, IplImage* img ) cvCalcSubdivVoronoi2D( subdiv ); cvStartReadSeq( (CvSeq*)(subdiv->edges), &reader, 0 ); for( i = 0; i < total; i++ ) if( CV_IS_SET_ELEM( edge )) // right CV_NEXT_SEQ_ELEM( elem_size, reader ); active_facet_color = CV_RGB( 255, 0, 0 ); img = cvCreateImage( cvSize(rect.width,rect.height), 8, 3 ); cvNamedWindow( win, 1 ); storage = cvCreateMemStorage(0); printf("Delaunay triangulation will be build now interactively.\n" for( i = 0; i < 200; i++ ) locate_point( subdiv, fp, img, active_facet_color ); if( cvWaitKey( 100 ) >= 0 ) cvSubdivDelaunay2DInsert( subdiv, fp ); if( cvWaitKey( 100 ) >= 0 ) cvSet( img, bkgnd_color, 0 ); cvWaitKey(0); cvReleaseMemStorage( &storage ); int main( int argc, char** argv ) 效果图(截的时候前两个图没截出来),视频是一个交通路面的视频(自己可以去下个): 大家就看个大概吧: 源代码: #include int main( int argc, char** argv ) CvMat* pFrameMat = NULL; //创建窗口 if( argc != 2 ) //打开视频文件 //转化成单通道图像再处理 cvConvert(pFrImg, pFrameMat); //二值化前景图 //进行形态学滤波,去掉噪音 //更新背景 //显示图像 //如果有按键事件,则跳出循环 //销毁窗口 //释放图像和矩阵 cvReleaseMat(&pFrameMat); return 0; 效果图:(太黑了) 源代码: #include "cv.h" // various tracking parameters (in seconds) // ring image buffer // temporary images // parameters: // allocate images at the beginning or cvCvtColor( img, buf[last], CV_BGR2GRAY ); // convert frame to grayscale idx2 = (last + 1) % N; // index of (last - (N-1))th frame silh = buf[idx2]; // convert MHI to blue 8u image cvZero( dst ); // 计算运动的梯度方向以及正确的方向掩模mask // iterate through the motion components, if( i < 0 ) { // case of the whole image,对整幅图像做操作 // select component ROI // 在选择的区域内, 计算运动方向 // 在轮廓内计算点数 // The function cvResetImageROI releases image ROI // check for the case of little motion // draw a clock with arrow indicating the direction cvCircle( dst, center, cvRound(magnitude*1.2), color, 3, CV_AA, 0 ); int main(int argc, char** argv) if( capture ) if( image ) update_mhi( image, motion, 60 ); if( cvWaitKey(10) >= 0 ) return 0; 没看出来有跟踪效果,是不是哥摄像头太拉了或得加强一下理论知识的学习: 穿的有点寒碜,嘿嘿 源代码: #include "cv.h" IplImage *image = 0, *hsv = 0, *hue = 0, *mask = 0, *backproject = 0, *histimg = 0; int backproject_mode = 0; void on_mouse( int event, int x, int y, int flags ) if( image->origin ) if( select_object ) } switch( event ) rgb[sector_data[sector][0]] = 255; #ifdef _DEBUG return cvScalar(rgb[2], rgb[1], rgb[0],0); int main( int argc, char** argv ) if( !capture ) printf( "Hot keys: \n" //cvNamedWindow( "Histogram", 1 ); for(;;) frame = cvQueryFrame( capture ); if( !image ) cvCopy( frame, image, 0 ); if( track_object ) cvInRangeS( hsv, cvScalar(0,smin,MIN(_vmin,_vmax),0), if( track_object < 0 ) cvZero( histimg ); cvCalcBackProject( &hue, backproject, hist ); // 使用 back project 方法 cvShowImage( "CamShiftDemo", image ); c = cvWaitKey(10); cvReleaseCapture( &capture ); return 0;
image1 = cvCloneImage( image[0] );
// 对彩色图像进行分割
l = 1;
threshold1 =255;
threshold2 =30;
ON_SEGMENT);
sthreshold2 = cvCreateTrackbar("Threshold2", "Segmentation", &threshold2, 255,
ON_SEGMENT);
cvWaitKey(0);
cvDestroyWindow("Source");
cvReleaseImage(&image0);
cvReleaseImage(&image1);
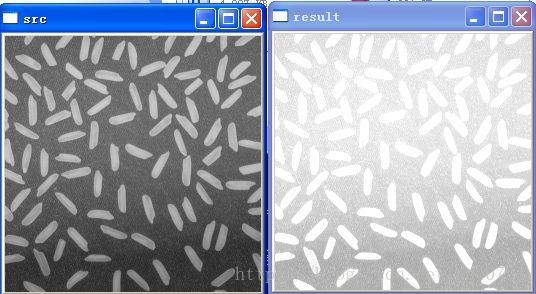
}图像的亮度变换
#include "highgui.h"
/*
src and dst are grayscale, 8-bit images;
Default input value:
[low, high] = [0,1]; X-Direction
[bottom, top] = [0,1]; Y-Direction
gamma ;
if adjust successfully, return 0, otherwise, return non-zero.
*/
int ImageAdjust(IplImage* src, IplImage* dst,
double low, double high, // X方向:low and high are the intensities of src
double bottom, double top, // Y方向:mapped to bottom and top of dst
double gamma )
{
if( low<0 && low>1 && high <0 && high>1&&
bottom<0 && bottom>1 && top<0 && top>1 && low>high)
return -1;
double low2 = low*255;
double high2 = high*255;
double bottom2 = bottom*255;
double top2 = top*255;
double err_in = high2 - low2;
double err_out = top2 - bottom2;
double val;
for( y = 0; y < src->height; y++)
{
for (x = 0; x < src->width; x++)
{
val = ((uchar*)(src->imageData + src->widthStep*y))[x];
val = pow((val - low2)/err_in, gamma) * err_out + bottom2;
if(val>255) val=255; if(val<0) val=0; // Make sure src is in the range [low,high]
((uchar*)(dst->imageData + dst->widthStep*y))[x] = (uchar) val;
}
}
return 0;
}
{
IplImage *src = 0, *dst = 0;
if( argc != 2 || (src=cvLoadImage(argv[1], 0)) == NULL) // force to gray image
return -1;
cvNamedWindow( "src", 1 );
cvNamedWindow( "result", 1 );
// Image adjust
dst = cvCloneImage(src);
// 输入参数 [0,0.5] 和 [0.5,1], gamma=1
if( ImageAdjust( src, dst, 0, 0.5, 0.5, 1, 1)!=0) return -1;
cvShowImage( "src", src );
cvShowImage( "result", dst );
cvWaitKey(0);
cvDestroyWindow("result");
cvReleaseImage( &src );
cvReleaseImage( &dst );
return 0;
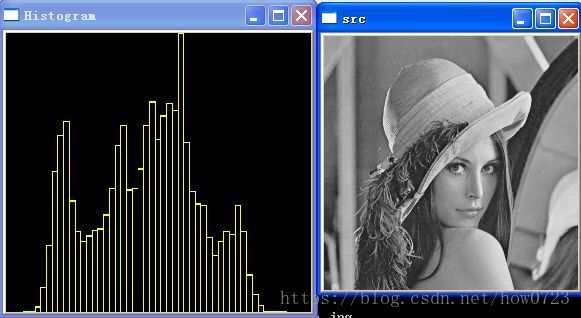
}单通道图像的直方图

#include "highgui.h"
#include
#include
{
IplImage *src = 0;
IplImage *histimg = 0;
CvHistogram *hist = 0;
int hdims = 50; // 划分HIST的个数,越高越精确
float hranges_arr[] = {0,255};
float* hranges = hranges_arr;
int bin_w;
float max_val;
int i;
if( argc != 2 || (src=cvLoadImage(argv[1], 0)) == NULL) // force to gray image
return -1;
cvNamedWindow( "Histogram", 0 );
cvNamedWindow( "src", 0);
hist = cvCreateHist( 1, &hdims, CV_HIST_ARRAY, &hranges, 1 ); // 计算直方图
histimg = cvCreateImage( cvSize(320,200), 8, 3 );
cvZero( histimg );
cvCalcHist( &src, hist, 0, 0 ); // 计算直方图
cvGetMinMaxHistValue( hist, 0, &max_val, 0, 0 ); // 只找最大值
cvConvertScale( hist->bins,
hist->bins, max_val ? 255. / max_val : 0., 0 ); // 缩放 bin 到区间 [0,255]
cvZero( histimg );
bin_w = histimg->width / hdims; // hdims: 条的个数,则 bin_w 为条的宽度
// 画直方图
for( i = 0; i < hdims; i++ )
{
double val = ( cvGetReal1D(hist->bins,i)*histimg->height/255 );
CvScalar color = CV_RGB(255,255,0); //(hsv2rgb(i*180.f/hdims);
cvRectangle( histimg, cvPoint(i*bin_w,histimg->height),
cvPoint((i+1)*bin_w,(int)(histimg->height - val)),
color, 1, 8, 0 );
}
cvShowImage( "src", src);
cvShowImage( "Histogram", histimg );
cvWaitKey(0);
cvDestroyWindow("Histogram");
cvReleaseImage( &src );
cvReleaseImage( &histimg );
cvReleaseHist ( &hist );
return 0;
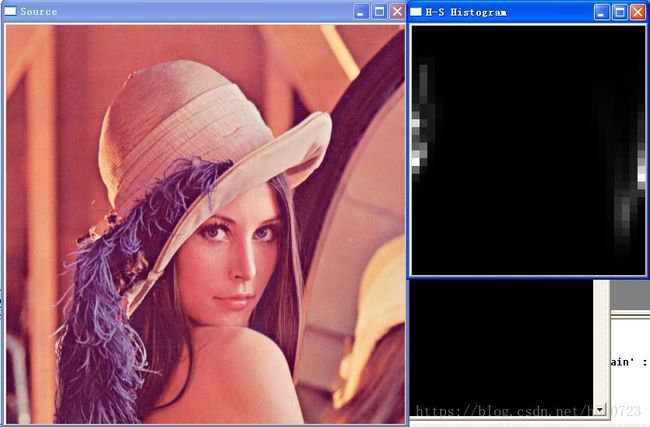
}计算和显示彩色图像的二维色调-饱和度图像
#include
{
IplImage* src;
if( argc == 2 && (src=cvLoadImage(argv[1], 1))!= 0)
{
IplImage* h_plane = cvCreateImage( cvGetSize(src), 8, 1 );
IplImage* s_plane = cvCreateImage( cvGetSize(src), 8, 1 );
IplImage* v_plane = cvCreateImage( cvGetSize(src), 8, 1 );
IplImage* planes[] = { h_plane, s_plane };
IplImage* hsv = cvCreateImage( cvGetSize(src), 8, 3 );
int h_bins = 30, s_bins = 32;
int hist_size[] = {h_bins, s_bins};
float h_ranges[] = { 0, 180 }; /* hue varies from 0 (~0°red) to 180 (~360°red again) */
float s_ranges[] = { 0, 255 }; /* saturation varies from 0 (black-gray-white) to 255 (pure spectrum color) */
float* ranges[] = { h_ranges, s_ranges };
int scale = 10;
IplImage* hist_img = cvCreateImage( cvSize(h_bins*scale,s_bins*scale), 8, 3 );
CvHistogram* hist;
float max_value = 0;
int h, s;
cvCvtPixToPlane( hsv, h_plane, s_plane, v_plane, 0 );
hist = cvCreateHist( 2, hist_size, CV_HIST_ARRAY, ranges, 1 );
cvCalcHist( planes, hist, 0, 0 );
cvGetMinMaxHistValue( hist, 0, &max_value, 0, 0 );
cvZero( hist_img );
{
for( s = 0; s < s_bins; s++ )
{
float bin_val = cvQueryHistValue_2D( hist, h, s );
int intensity = cvRound(bin_val*255/max_value);
cvRectangle( hist_img, cvPoint( h*scale, s*scale ),
cvPoint( (h+1)*scale - 1, (s+1)*scale - 1),
CV_RGB(intensity,intensity,intensity),
CV_FILLED );
}
}
cvNamedWindow( "Source", 1 );
cvShowImage( "Source", src );
cvNamedWindow( "H-S Histogram", 1 );
cvShowImage( "H-S Histogram", hist_img );
cvWaitKey(0);
}
}图像的直方图均匀化

#include "highgui.h"
{
IplImage *src = 0, *dst = 0;
CvHistogram *hist = 0;
int n = HDIM;
double nn[HDIM];
uchar T[HDIM];
CvMat *T_mat;
int x;
int sum = 0; // sum of pixels of the source image 图像中象素点的总和
double val = 0;
if( argc != 2 || (src=cvLoadImage(argv[1], 0)) == NULL) // force to gray image
return -1;
cvNamedWindow( "source", 1 );
cvNamedWindow( "result", 1 );
// 计算直方图
hist = cvCreateHist( 1, &n, CV_HIST_ARRAY, 0, 1 );
cvCalcHist( &src, hist, 0, 0 );
// Create Accumulative Distribute Function of histgram
val = 0;
for ( x = 0; x < n; x++)
{
val = val + cvGetReal1D (hist->bins, x);
nn[x] = val;
}
sum = src->height * src->width;
for( x = 0; x < n; x++ )
{
T[x] = (uchar) (255 * nn[x] / sum); // range is [0,255]
}
dst = cvCloneImage( src );
T_mat = cvCreateMatHeader( 1, 256, CV_8UC1 );
cvSetData( T_mat, T, 0 );
// 直接调用内部函数完成 look-up-table 的过程
cvLUT( src, dst, T_mat );
cvShowImage( "result", dst );
cvWaitKey(0);
cvDestroyWindow("result");
cvReleaseImage( &src );
cvReleaseImage( &dst );
cvReleaseHist ( &hist );
return 0;
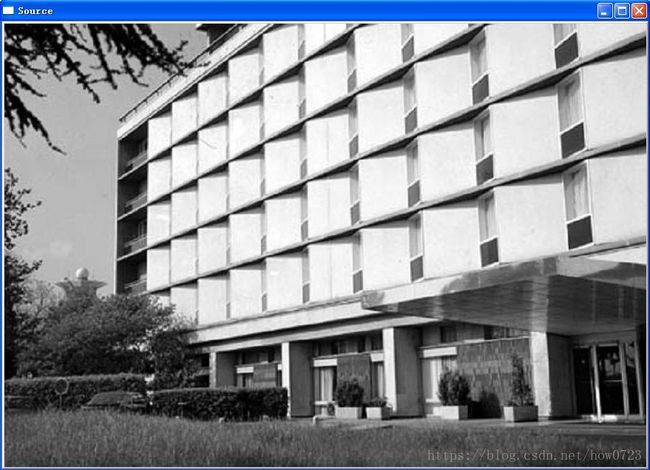
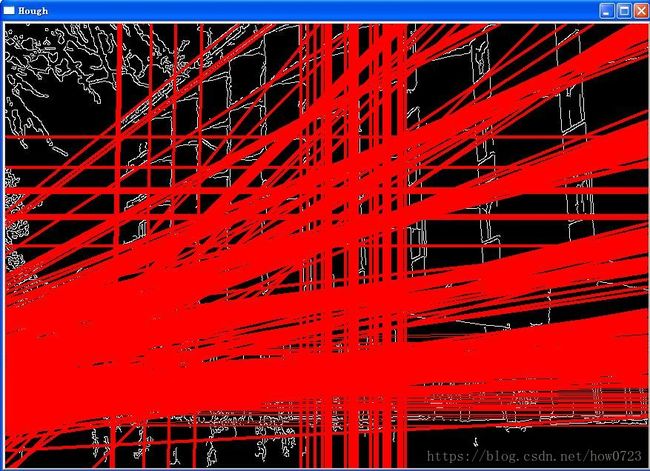
}用Hongh变换检测线段
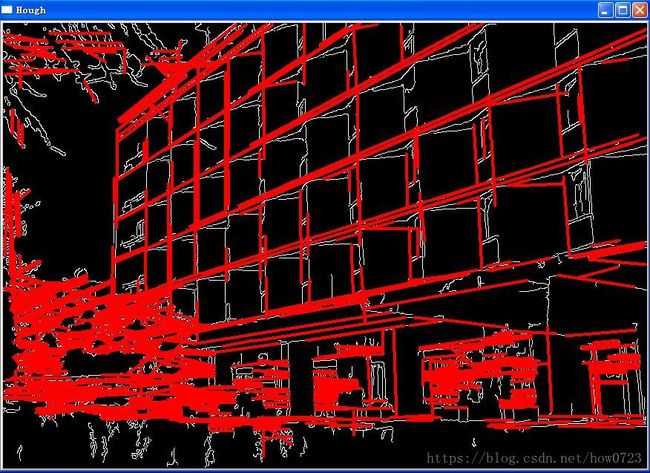
编译时选择“#if 1”或“#if 0”,可以使用标准和概率HOUGH变换两种方法 */
#include
#include
#include
{
IplImage* src;
if( argc == 2 && (src=cvLoadImage(argv[1], 0))!= 0)
{
IplImage* dst = cvCreateImage( cvGetSize(src), 8, 1 );
IplImage* color_dst = cvCreateImage( cvGetSize(src), 8, 3 );
CvMemStorage* storage = cvCreateMemStorage(0);
CvSeq* lines = 0;
int i;
cvCanny( src, dst, 50, 200, 3 );
cvCvtColor( dst, color_dst, CV_GRAY2BGR );
#if 1
lines = cvHoughLines2( dst, storage, CV_HOUGH_STANDARD, 1, CV_PI/180, 150, 0, 0 );
{
float* line = (float*)cvGetSeqElem(lines,i);
float rho = line[0];
float theta = line[1];
CvPoint pt1, pt2;
double a = cos(theta), b = sin(theta);
if( fabs(a) < 0.001 )
{
pt1.x = pt2.x = cvRound(rho);
pt1.y = 0;
pt2.y = color_dst->height;
}
else if( fabs(b) < 0.001 )
{
pt1.y = pt2.y = cvRound(rho);
pt1.x = 0;
pt2.x = color_dst->width;
}
else
{
pt1.x = 0;
pt1.y = cvRound(rho/b);
pt2.x = cvRound(rho/a);
pt2.y = 0;
}
cvLine( color_dst, pt1, pt2, CV_RGB(255,0,0), 3, 8 );
}
#else
lines = cvHoughLines2( dst, storage, CV_HOUGH_PROBABILISTIC, 1, CV_PI/180, 80, 30, 10 );
for( i = 0; i < lines->total; i++ )
{
CvPoint* line = (CvPoint*)cvGetSeqElem(lines,i);
cvLine( color_dst, line[0], line[1], CV_RGB(255,0,0), 3, 8 );
}
#endif
cvNamedWindow( "Source", 1 );
cvShowImage( "Source", src );
cvShowImage( "Hough", color_dst );
}
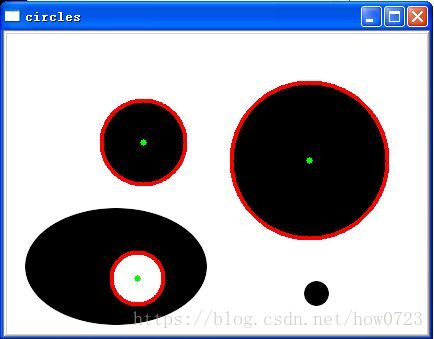
}利用Hough变换检测圆(是圆不是椭圆)
#include
#include
{
IplImage* img;
if( argc == 2 && (img=cvLoadImage(argv[1], 1))!= 0)
{
IplImage* gray = cvCreateImage( cvGetSize(img), 8, 1 );
CvMemStorage* storage = cvCreateMemStorage(0);
cvCvtColor( img, gray, CV_BGR2GRAY );
cvSmooth( gray, gray, CV_GAUSSIAN, 9, 9 ); // smooth it, otherwise a lot of false circles may be detected
CvSeq* circles = cvHoughCircles( gray, storage, CV_HOUGH_GRADIENT, 2, gray->height/4, 200, 100 );
int i;
for( i = 0; i < circles->total; i++ )
{
float* p = (float*)cvGetSeqElem( circles, i );
cvCircle( img, cvPoint(cvRound(p[0]),cvRound(p[1])), 3, CV_RGB(0,255,0), -1, 8, 0 );
cvCircle( img, cvPoint(cvRound(p[0]),cvRound(p[1])), cvRound(p[2]), CV_RGB(255,0,0), 3, 8, 0 );
}
cvNamedWindow( "circles", 1 );
cvShowImage( "circles", img );
cvWaitKey(0);
}
return 0;
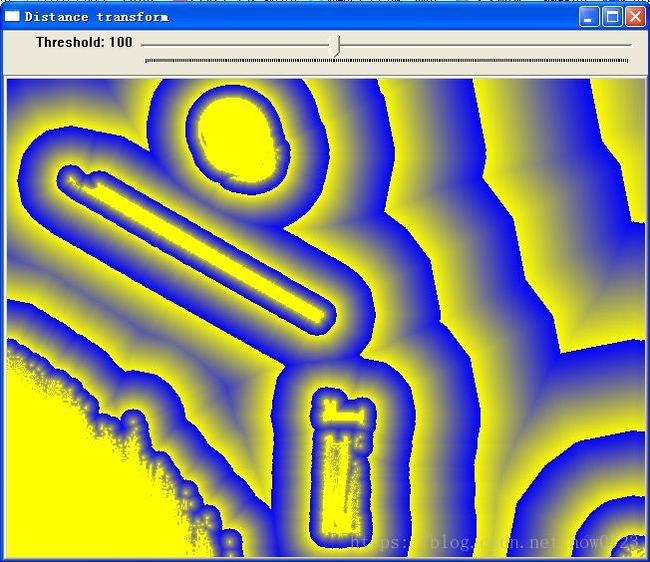
}距离变换

#include "highgui.h"
#include
char tbarname[] = "Threshold";
int mask_size = CV_DIST_MASK_5;
int build_voronoi = 0;
int edge_thresh = 100;
IplImage* dist = 0;
IplImage* dist8u1 = 0;
IplImage* dist8u2 = 0;
IplImage* dist8u = 0;
IplImage* dist32s = 0;
IplImage* edge = 0;
IplImage* labels = 0;
void on_trackbar( int dummy )
{
static const uchar colors[][3] =
{
{0,0,0},
{255,0,0},
{255,128,0},
{255,255,0},
{0,255,0},
{0,128,255},
{0,255,255},
{0,0,255},
{255,0,255}
};
int msize = mask_size;
msize = CV_DIST_MASK_5;
{
// begin "painting" the distance transform result
cvConvertScale( dist, dist, 5000.0, 0 );
cvPow( dist, dist, 0.5 );
cvConvertScale( dist, dist32s, 1.0, 0.5 );
cvAndS( dist32s, cvScalarAll(255), dist32s, 0 );
cvConvertScale( dist32s, dist8u1, 1, 0 );
cvConvertScale( dist32s, dist32s, -1, 0 );
cvAddS( dist32s, cvScalarAll(255), dist32s, 0 );
cvConvertScale( dist32s, dist8u2, 1, 0 );
cvMerge( dist8u1, dist8u2, dist8u2, 0, dist8u );
// end "painting" the distance transform result
}
else
{
int i, j;
for( i = 0; i < labels->height; i++ )
{
int* ll = (int*)(labels->imageData + i*labels->widthStep);
float* dd = (float*)(dist->imageData + i*dist->widthStep);
uchar* d = (uchar*)(dist8u->imageData + i*dist8u->widthStep);
for( j = 0; j < labels->width; j++ )
{
int idx = ll[j] == 0 || dd[j] == 0 ? 0 : (ll[j]-1)%8 + 1;
int b = cvRound(colors[idx][0]);
int g = cvRound(colors[idx][1]);
int r = cvRound(colors[idx][2]);
d[j*3] = (uchar)b;
d[j*3+1] = (uchar)g;
d[j*3+2] = (uchar)r;
}
}
}
cvShowImage( wndname, dist8u );
}
{
char* filename = argc == 2 ? argv[1] : (char*)"stuff.jpg";
return -1;
"\tESC - quit the program\n"
"\t3 - use 3x3 mask\n"
"\t5 - use 5x5 mask\n"
"\t0 - use precise distance transform\n"
"\tv - switch Voronoi diagram mode on/off\n"
"\tENTER - loop through all the modes\n" );
dist8u1 = cvCloneImage( gray );
dist8u2 = cvCloneImage( gray );
dist8u = cvCreateImage( cvGetSize(gray), IPL_DEPTH_8U, 3 );
dist32s = cvCreateImage( cvGetSize(gray), IPL_DEPTH_32S, 1 );
edge = cvCloneImage( gray );
labels = cvCreateImage( cvGetSize(gray), IPL_DEPTH_32S, 1 );
{
int c;
// Call to update the view
on_trackbar(0);
break;
mask_size = CV_DIST_MASK_3;
else if( (char)c == '5' )
mask_size = CV_DIST_MASK_5;
else if( (char)c == '0' )
mask_size = CV_DIST_MASK_PRECISE;
else if( (char)c == 'v' )
build_voronoi ^= 1;
else if( (char)c == '\n' )
{
if( build_voronoi )
{
build_voronoi = 0;
mask_size = CV_DIST_MASK_3;
}
else if( mask_size == CV_DIST_MASK_3 )
mask_size = CV_DIST_MASK_5;
else if( mask_size == CV_DIST_MASK_5 )
mask_size = CV_DIST_MASK_PRECISE;
else if( mask_size == CV_DIST_MASK_PRECISE )
build_voronoi = 1;
}
}
cvReleaseImage( &edge );
cvReleaseImage( &dist );
cvReleaseImage( &dist8u );
cvReleaseImage( &dist8u1 );
cvReleaseImage( &dist8u2 );
cvReleaseImage( &dist32s );
cvReleaseImage( &labels );
cvDestroyWindow( wndname );
return 0;
}椭圆曲线拟合
#include "highgui.h"
void process_image(int h);
{
const char* filename = argc == 2 ? argv[1] : (char*)"2.jpg";
// 读入图像,强制为灰度图像
if( (image03 = cvLoadImage(filename, 0)) == 0 )
return -1;
image02 = cvCloneImage( image03 );
image04 = cvCloneImage( image03 );
cvNamedWindow("Source", 1);
cvNamedWindow("Result", 1);
cvShowImage("Source", image03);
cvCreateTrackbar( "Threshold", "Result", &slider_pos, 255, process_image );
cvWaitKey(0);
cvReleaseImage(&image02);
cvReleaseImage(&image03);
cvDestroyWindow("Result");
}
// draw it and approximate it by ellipses.
void process_image(int h)
{
CvMemStorage* stor;
CvSeq* cont;
CvBox2D32f* box;
CvPoint* PointArray;
CvPoint2D32f* PointArray2D32f;
// 创建动态结构序列
stor = cvCreateMemStorage(0);
cont = cvCreateSeq(CV_SEQ_ELTYPE_POINT, sizeof(CvSeq), sizeof(CvPoint) , stor);
// 二值话图像.
cvThreshold( image03, image02, slider_pos, 255, CV_THRESH_BINARY );
// 寻找所有轮廓.
cvFindContours( image02, stor, &cont, sizeof(CvContour),
CV_RETR_LIST, CV_CHAIN_APPROX_NONE, cvPoint(0,0));
// Clear images. IPL use.
cvZero(image02);
cvZero(image04);
// 本循环绘制所有轮廓并用椭圆拟合.
for(;cont;cont = cont->h_next)
{
int i; // Indicator of cycle.
int count = cont->total; // This is number point in contour
CvPoint center;
CvSize size;
// Number point must be more than or equal to 6 (for cvFitEllipse_32f).
if( count < 6 )
continue;
// Alloc memory for contour point set.
PointArray = (CvPoint*)malloc( count*sizeof(CvPoint) );
PointArray2D32f= (CvPoint2D32f*)malloc( count*sizeof(CvPoint2D32f) );
// Alloc memory for ellipse data.
box = (CvBox2D32f*)malloc(sizeof(CvBox2D32f));
// Get contour point set.
cvCvtSeqToArray(cont, PointArray, CV_WHOLE_SEQ);
// Convert CvPoint set to CvBox2D32f set.
for(i=0; i
PointArray2D32f[i].x = (float)PointArray[i].x;
PointArray2D32f[i].y = (float)PointArray[i].y;
}
//拟合当前轮廓.
cvFitEllipse(PointArray2D32f, count, box);
// 绘制当前轮廓.
cvDrawContours(image04,cont,CV_RGB(255,255,255),
CV_RGB(255,255,255),0,1,8,cvPoint(0,0));
// Convert ellipse data from float to integer representation.
center.x = cvRound(box->center.x);
center.y = cvRound(box->center.y);
size.width = cvRound(box->size.width*0.5);
size.height = cvRound(box->size.height*0.5);
box->angle = -box->angle;
// Draw ellipse.
cvEllipse(image04, center, size,
box->angle, 0, 360,
CV_RGB(0,0,255), 1, CV_AA, 0);
// Free memory.
free(PointArray);
free(PointArray2D32f);
free(box);
}
// Show image. HighGUI use.
cvShowImage( "Result", image04 );
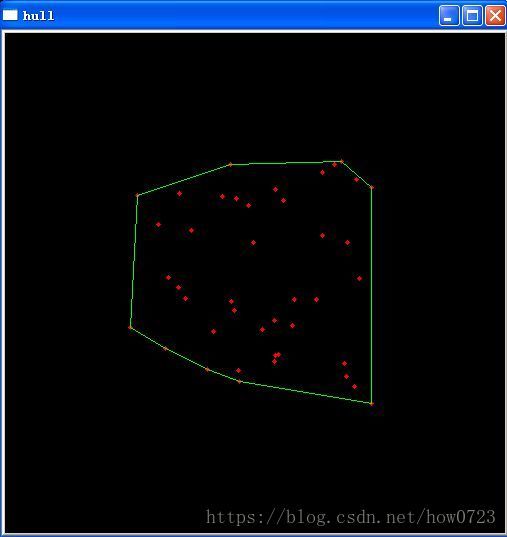
}由点集序列或数组创建凸外形
#include "highgui.h"
#include
{
IplImage* img = cvCreateImage( cvSize( 500, 500 ), 8, 3 );
cvNamedWindow( "hull", 1 );
CvMemStorage* storage = cvCreateMemStorage();
#endif
{
int i, count = rand()%100 + 1, hullcount;
CvPoint pt0;
#if !ARRAY
CvSeq* ptseq = cvCreateSeq( CV_SEQ_KIND_GENERIC|CV_32SC2, sizeof(CvContour),
sizeof(CvPoint), storage );
CvSeq* hull;
{
pt0.x = rand() % (img->width/2) + img->width/4;
pt0.y = rand() % (img->height/2) + img->height/4;
cvSeqPush( ptseq, &pt0 );
}
hull = cvConvexHull2( ptseq, 0, CV_CLOCKWISE, 0 );
hullcount = hull->total;
#else
CvPoint* points = (CvPoint*)malloc( count * sizeof(points[0]));
int* hull = (int*)malloc( count * sizeof(hull[0]));
CvMat point_mat = cvMat( 1, count, CV_32SC2, points );
CvMat hull_mat = cvMat( 1, count, CV_32SC1, hull );
{
pt0.x = rand() % (img->width/2) + img->width/4;
pt0.y = rand() % (img->height/2) + img->height/4;
points[i] = pt0;
}
cvConvexHull2( &point_mat, &hull_mat, CV_CLOCKWISE, 0 );
hullcount = hull_mat.cols;
#endif
cvZero( img );
for( i = 0; i < count; i++ )
{
#if !ARRAY
pt0 = *CV_GET_SEQ_ELEM( CvPoint, ptseq, i );
#else
pt0 = points[i];
#endif
cvCircle( img, pt0, 2, CV_RGB( 255, 0, 0 ), CV_FILLED );
}
pt0 = **CV_GET_SEQ_ELEM( CvPoint*, hull, hullcount - 1 );
#else
pt0 = points[hull[hullcount-1]];
#endif
{
#if !ARRAY
CvPoint pt = **CV_GET_SEQ_ELEM( CvPoint*, hull, i );
#else
CvPoint pt = points[hull[i]];
#endif
cvLine( img, pt0, pt, CV_RGB( 0, 255, 0 ));
pt0 = pt;
}
if( key == 27 ) // 'ESC'
break;
cvClearMemStorage( storage );
#else
free( points );
free( hull );
#endif
}
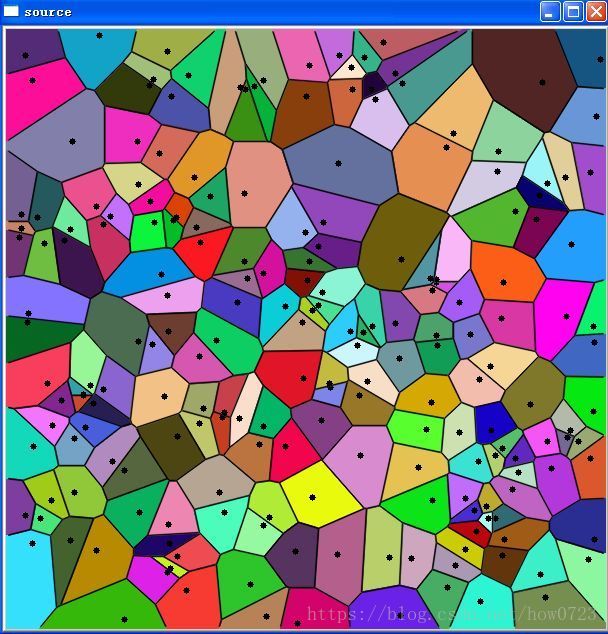
}Delaunay三角形和Voronoi划分的迭代式构造
#include "highgui.h"
#include
delaunay triangulation and voronoi tesselation */
CvRect rect )
{
CvSubdiv2D* subdiv;
sizeof(CvSubdiv2DPoint),
sizeof(CvQuadEdge2D),
storage );
cvInitSubdivDelaunay2D( subdiv, rect );
}
void draw_subdiv_point( IplImage* img, CvPoint2D32f fp, CvScalar color )
{
cvCircle( img, cvPoint(cvRound(fp.x), cvRound(fp.y)), 3, color, CV_FILLED, 8, 0 );
}
void draw_subdiv_edge( IplImage* img, CvSubdiv2DEdge edge, CvScalar color )
{
CvSubdiv2DPoint* org_pt;
CvSubdiv2DPoint* dst_pt;
CvPoint2D32f org;
CvPoint2D32f dst;
CvPoint iorg, idst;
dst_pt = cvSubdiv2DEdgeDst(edge);
{
org = org_pt->pt;
dst = dst_pt->pt;
idst = cvPoint( cvRound( dst.x ), cvRound( dst.y ));
}
}
void draw_subdiv( IplImage* img, CvSubdiv2D* subdiv,
CvScalar delaunay_color, CvScalar voronoi_color )
{
CvSeqReader reader;
int i, total = subdiv->edges->total;
int elem_size = subdiv->edges->elem_size;
{
CvQuadEdge2D* edge = (CvQuadEdge2D*)(reader.ptr);
{
draw_subdiv_edge( img, (CvSubdiv2DEdge)edge + 1, voronoi_color );
draw_subdiv_edge( img, (CvSubdiv2DEdge)edge, delaunay_color );
}
}
}
void locate_point( CvSubdiv2D* subdiv, CvPoint2D32f fp, IplImage* img,
CvScalar active_color )
{
CvSubdiv2DEdge e;
CvSubdiv2DEdge e0 = 0;
CvSubdiv2DPoint* p = 0;
{
e = e0;
do
{
draw_subdiv_edge( img, e, active_color );
e = cvSubdiv2DGetEdge(e,CV_NEXT_AROUND_LEFT);
}
while( e != e0 );
}
}
void draw_subdiv_facet( IplImage* img, CvSubdiv2DEdge edge )
{
CvSubdiv2DEdge t = edge;
int i, count = 0;
CvPoint* buf = 0;
do
{
count++;
t = cvSubdiv2DGetEdge( t, CV_NEXT_AROUND_LEFT );
} while (t != edge );
t = edge;
for( i = 0; i < count; i++ )
{
CvSubdiv2DPoint* pt = cvSubdiv2DEdgeOrg( t );
if( !pt ) break;
buf[i] = cvPoint( cvRound(pt->pt.x), cvRound(pt->pt.y));
t = cvSubdiv2DGetEdge( t, CV_NEXT_AROUND_LEFT );
}
{
CvSubdiv2DPoint* pt = cvSubdiv2DEdgeDst( cvSubdiv2DRotateEdge( edge, 1 ));
cvFillConvexPoly( img, buf, count, CV_RGB(rand()&255,rand()&255,rand()&255), CV_AA, 0 );
cvPolyLine( img, &buf, &count, 1, 1, CV_RGB(0,0,0), 1, CV_AA, 0);
draw_subdiv_point( img, pt->pt, CV_RGB(0,0,0));
}
free( buf );
}
{
CvSeqReader reader;
int i, total = subdiv->edges->total;
int elem_size = subdiv->edges->elem_size;
{
CvQuadEdge2D* edge = (CvQuadEdge2D*)(reader.ptr);
{
CvSubdiv2DEdge e = (CvSubdiv2DEdge)edge;
// left
draw_subdiv_facet( img, cvSubdiv2DRotateEdge( e, 1 ));
draw_subdiv_facet( img, cvSubdiv2DRotateEdge( e, 3 ));
}
}
}
void run(void)
{
char win[] = "source";
int i;
CvRect rect = { 0, 0, 600, 600 };
CvMemStorage* storage;
CvSubdiv2D* subdiv;
IplImage* img;
CvScalar active_facet_color, delaunay_color, voronoi_color, bkgnd_color;
delaunay_color = CV_RGB( 0,0,0);
voronoi_color = CV_RGB(0, 180, 0);
bkgnd_color = CV_RGB(255,255,255);
cvSet( img, bkgnd_color, 0 );
subdiv = init_delaunay( storage, rect );
"To stop the process, press any key\n\n");
{
CvPoint2D32f fp = cvPoint2D32f( (float)(rand()%(rect.width-10)+5),
(float)(rand()%(rect.height-10)+5));
cvShowImage( win, img );
break;
cvCalcSubdivVoronoi2D( subdiv );
cvSet( img, bkgnd_color, 0 );
draw_subdiv( img, subdiv, delaunay_color, voronoi_color );
cvShowImage( win, img );
break;
}
paint_voronoi( subdiv, img );
cvShowImage( win, img );
cvReleaseImage(&img);
cvDestroyWindow( win );
}
{
run();
return 0;
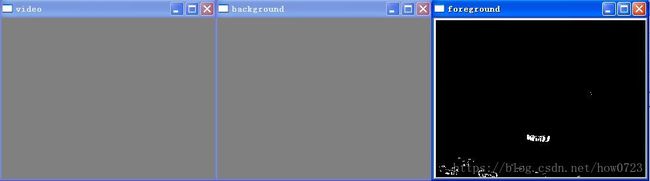
}利用背景建模检测运动物体(推荐)
#include
#include
{
//声明IplImage指针
IplImage* pFrame = NULL;
IplImage* pFrImg = NULL;
IplImage* pBkImg = NULL;
CvMat* pFrMat = NULL;
CvMat* pBkMat = NULL;
CvCapture* pCapture = NULL;
int nFrmNum = 0;
cvNamedWindow("video", 1);
cvNamedWindow("background",1);
cvNamedWindow("foreground",1);
//使窗口有序排列
cvMoveWindow("video", 30, 0);
cvMoveWindow("background", 360, 0);
cvMoveWindow("foreground", 690, 0);
{
fprintf(stderr, "Usage: bkgrd
return -1;
}
if( !(pCapture = cvCaptureFromFile(argv[1])))
{
fprintf(stderr, "Can not open video file %s\n", argv[1]);
return -2;
}
//逐帧读取视频
while(pFrame = cvQueryFrame( pCapture ))
{
nFrmNum++;
//如果是第一帧,需要申请内存,并初始化
if(nFrmNum == 1)
{
pBkImg = cvCreateImage(cvSize(pFrame->width, pFrame->height),
IPL_DEPTH_8U,1);
pFrImg = cvCreateImage(cvSize(pFrame->width, pFrame->height),
IPL_DEPTH_8U,1);
pBkMat = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
pFrMat = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
pFrameMat = cvCreateMat(pFrame->height, pFrame->width, CV_32FC1);
cvCvtColor(pFrame, pBkImg, CV_BGR2GRAY);
cvCvtColor(pFrame, pFrImg, CV_BGR2GRAY);
cvConvert(pFrImg, pFrMat);
cvConvert(pFrImg, pBkMat);
}
else
{
cvCvtColor(pFrame, pFrImg, CV_BGR2GRAY);
cvConvert(pFrImg, pFrameMat);
//先做高斯滤波,以平滑图像
//cvSmooth(pFrameMat, pFrameMat, CV_GAUSSIAN, 3, 0, 0);
//当前帧跟背景图相减
cvAbsDiff(pFrameMat, pBkMat, pFrMat);
cvThreshold(pFrMat, pFrImg, 60, 255.0, CV_THRESH_BINARY);
//cvErode(pFrImg, pFrImg, 0, 1);
//cvDilate(pFrImg, pFrImg, 0, 1);
cvRunningAvg(pFrameMat, pBkMat, 0.003, 0);
//将背景转化为图像格式,用以显示
cvConvert(pBkMat, pBkImg);
cvShowImage("video", pFrame);
cvShowImage("background", pBkImg);
cvShowImage("foreground", pFrImg);
//此等待也为cvShowImage函数提供时间完成显示
//等待时间可以根据CPU速度调整
if( cvWaitKey(2) >= 0 )
break;
} // end of if-else
} // end of while-loop
cvDestroyWindow("video");
cvDestroyWindow("background");
cvDestroyWindow("foreground");
cvReleaseImage(&pFrImg);
cvReleaseImage(&pBkImg);
cvReleaseMat(&pFrMat);
cvReleaseMat(&pBkMat);
}运动模板检测(摄像头)

#include "highgui.h"
#include
#include
#include
#include
const double MHI_DURATION = 0.5;
const double MAX_TIME_DELTA = 0.5;
const double MIN_TIME_DELTA = 0.05;
// 用于运动检测的循环帧数,与机器速度以及FPS设置有关
const int N = 2;
IplImage **buf = 0;
int last = 0;
IplImage *mhi = 0; // MHI: motion history image
IplImage *orient = 0; // orientation
IplImage *mask = 0; // valid orientation mask
IplImage *segmask = 0; // motion segmentation map
CvMemStorage* storage = 0; // temporary storage
// img - input video frame
// dst - resultant motion picture
// args - optional parameters
void update_mhi( IplImage* img, IplImage* dst, int diff_threshold )
{
double timestamp = clock()/1000.; // get current time in seconds
CvSize size = cvSize(img->width,img->height); // get current frame size
int i, idx1 = last, idx2;
IplImage* silh;
CvSeq* seq;
CvRect comp_rect;
double count;
double angle;
CvPoint center;
double magnitude;
CvScalar color;
// reallocate them if the frame size is changed
if( !mhi || mhi->width != size.width || mhi->height != size.height )
{
if( buf == 0 )
{
buf = (IplImage**)malloc(N*sizeof(buf[0]));
memset( buf, 0, N*sizeof(buf[0]));
}
for( i = 0; i < N; i++ )
{
cvReleaseImage( &buf[i] );
buf[i] = cvCreateImage( size, IPL_DEPTH_8U, 1 );
cvZero( buf[i] );
}
cvReleaseImage( &mhi );
cvReleaseImage( &orient );
cvReleaseImage( &segmask );
cvReleaseImage( &mask );
mhi = cvCreateImage( size, IPL_DEPTH_32F, 1 );
cvZero( mhi ); // clear MHI at the beginning
orient = cvCreateImage( size, IPL_DEPTH_32F, 1 );
segmask = cvCreateImage( size, IPL_DEPTH_32F, 1 );
mask = cvCreateImage( size, IPL_DEPTH_8U, 1 );
}
last = idx2;
// 相邻两帧的差
cvAbsDiff( buf[idx1], buf[idx2], silh ); // get difference between frames
// 对差图像做二值化
cvThreshold( silh, silh, diff_threshold, 1, CV_THRESH_BINARY ); // and threshold it
cvUpdateMotionHistory( silh, mhi, timestamp, MHI_DURATION ); // update MHI
// cvCvtScale的第四个参数 shift = (MHI_DURATION - timestamp)*255./MHI_DURATION
// 控制帧差的消失速率
cvCvtScale( mhi, mask, 255./MHI_DURATION,
(MHI_DURATION - timestamp)*255./MHI_DURATION );
cvCvtPlaneToPix(mask, 0, 0, 0, dst ); // B,G,R,0 -> dist : convert to BLUE image
// Filter size = 3
cvCalcMotionGradient( mhi, mask, orient,
MAX_TIME_DELTA, MIN_TIME_DELTA, 3 );
if( !storage )
storage = cvCreateMemStorage(0);
else
cvClearMemStorage(storage);
// 运动分割: 获得运动部件的连续序列
// segmask is marked motion components map. It is not used further
seq = cvSegmentMotion( mhi, segmask, storage, timestamp, MAX_TIME_DELTA );
// One more iteration (i == -1) corresponds to the whole image (global motion)
for( i = 0; i < seq->total; i++ )
{
comp_rect = cvRect( 0, 0, size.width, size.height );
color = CV_RGB(255,255,255); // white color
magnitude = 100; // 画线长度以及圆半径的大小控制
}
else { // i-th motion component
comp_rect = ((CvConnectedComp*)cvGetSeqElem( seq, i ))->rect;
// 去掉小的部分
if( comp_rect.width + comp_rect.height < 100 )
continue;
color = CV_RGB(255,0,0); // red color
magnitude = 30;
//if(seq->total > 0) MessageBox(NULL,"Motion Detected",NULL,0);
}
cvSetImageROI( silh, comp_rect );
cvSetImageROI( mhi, comp_rect );
cvSetImageROI( orient, comp_rect );
cvSetImageROI( mask, comp_rect );
angle = cvCalcGlobalOrientation( orient, mask, mhi, timestamp,
MHI_DURATION);
angle = 360.0 - angle; // adjust for images with top-left origin
// Norm(L1) = sum of total pixel values
count = cvNorm( silh, 0, CV_L1, 0 );
cvResetImageROI( mhi );
cvResetImageROI( orient );
cvResetImageROI( mask );
cvResetImageROI( silh );
if( count < comp_rect.width*comp_rect.height * 0.05 ) // five percent of pixel
continue;
center = cvPoint( (comp_rect.x + comp_rect.width/2),
(comp_rect.y + comp_rect.height/2) );
cvLine( dst, center, cvPoint( cvRound( center.x +
magnitude*cos(angle*CV_PI/180)),
cvRound( center.y - magnitude*sin(angle*CV_PI/180))),
color, 3, CV_AA, 0 );
}
}
{
IplImage* motion = 0;
CvCapture* capture = 0;
if( argc == 1 || (argc == 2 && strlen(argv[1]) == 1 && isdigit(argv[1][0])))
capture = cvCaptureFromCAM( argc == 2 ? argv[1][0] - '0' : 0 );
else if( argc == 2 )
capture = cvCaptureFromAVI( argv[1] );
{
cvNamedWindow( "Motion", 1 );
for(;;)
{
IplImage* image;
if( !cvGrabFrame( capture ))
break;
image = cvRetrieveFrame( capture );
{
if( !motion )
{
motion = cvCreateImage( cvSize(image->width,image->height),
8, 3 );
cvZero( motion );
motion->origin = image->origin;
}
}
cvShowImage( "Motion", motion );
break;
}
cvReleaseCapture( &capture );
cvDestroyWindow( "Motion" );
}
}显示如何利用Camshift算法进行彩色目标的跟踪
#include "highgui.h"
#include
#include
CvHistogram *hist = 0;
int select_object = 0;
int track_object = 0;
int show_hist = 1;
CvPoint origin;
CvRect selection;
CvRect track_window;
CvBox2D track_box; // tracking 返回的区域 box,带角度
CvConnectedComp track_comp;
int hdims = 48; // 划分HIST的个数,越高越精确
float hranges_arr[] = {0,180};
float* hranges = hranges_arr;
int vmin = 10, vmax = 256, smin = 30;
{
if( !image )
return;
y = image->height - y;
{
selection.x = MIN(x,origin.x);
selection.y = MIN(y,origin.y);
selection.width = selection.x + CV_IABS(x - origin.x);
selection.height = selection.y + CV_IABS(y - origin.y);
selection.x = MAX( selection.x, 0 );
selection.y = MAX( selection.y, 0 );
selection.width = MIN( selection.width, image->width );
selection.height = MIN( selection.height, image->height );
selection.width -= selection.x;
selection.height -= selection.y;
{
case CV_EVENT_LBUTTONDOWN:
origin = cvPoint(x,y);
selection = cvRect(x,y,0,0);
select_object = 1;
break;
case CV_EVENT_LBUTTONUP:
select_object = 0;
if( selection.width > 0 && selection.height > 0 )
track_object = -1;
#ifdef _DEBUG
printf("\n # 鼠标的选择区域:");
printf("\n X = %d, Y = %d, Width = %d, Height = %d",
selection.x, selection.y, selection.width, selection.height);
#endif
break;
}
}
CvScalar hsv2rgb( float hue )
{
int rgb[3], p, sector;
static const int sector_data[][3]=
{{0,2,1}, {1,2,0}, {1,0,2}, {2,0,1}, {2,1,0}, {0,1,2}};
hue *= 0.033333333333333333333333333333333f;
sector = cvFloor(hue);
p = cvRound(255*(hue - sector));
p ^= sector & 1 ? 255 : 0;
rgb[sector_data[sector][1]] = 0;
rgb[sector_data[sector][2]] = p;
printf("\n # Convert HSV to RGB:");
printf("\n HUE = %f", hue);
printf("\n R = %d, G = %d, B = %d", rgb[0],rgb[1],rgb[2]);
#endif
}
{
CvCapture* capture = 0;
IplImage* frame = 0;
if( argc == 1 || (argc == 2 && strlen(argv[1]) == 1 && isdigit(argv[1][0])))
capture = cvCaptureFromCAM( argc == 2 ? argv[1][0] - '0' : 0 );
else if( argc == 2 )
capture = cvCaptureFromAVI( argv[1] );
{
fprintf(stderr,"Could not initialize capturing...\n");
return -1;
}
"\tESC - quit the program\n"
"\tc - stop the tracking\n"
"\tb - switch to/from backprojection view\n"
"\th - show/hide object histogram\n"
"To initialize tracking, select the object with mouse\n" );
cvNamedWindow( "CamShiftDemo", 1 );
cvSetMouseCallback( "CamShiftDemo", on_mouse, NULL ); // on_mouse 自定义事件
cvCreateTrackbar( "Vmin", "CamShiftDemo", &vmin, 256, 0 );
cvCreateTrackbar( "Vmax", "CamShiftDemo", &vmax, 256, 0 );
cvCreateTrackbar( "Smin", "CamShiftDemo", &smin, 256, 0 );
{
int i, bin_w, c;
if( !frame )
break;
{
/* allocate all the buffers */
image = cvCreateImage( cvGetSize(frame), 8, 3 );
image->origin = frame->origin;
hsv = cvCreateImage( cvGetSize(frame), 8, 3 );
hue = cvCreateImage( cvGetSize(frame), 8, 1 );
mask = cvCreateImage( cvGetSize(frame), 8, 1 );
backproject = cvCreateImage( cvGetSize(frame), 8, 1 );
hist = cvCreateHist( 1, &hdims, CV_HIST_ARRAY, &hranges, 1 ); // 计算直方图
histimg = cvCreateImage( cvSize(320,200), 8, 3 );
cvZero( histimg );
}
cvCvtColor( image, hsv, CV_BGR2HSV ); // 彩色空间转换 BGR to HSV
{
int _vmin = vmin, _vmax = vmax;
cvScalar(180,256,MAX(_vmin,_vmax),0), mask ); // 得到二值的MASK
cvSplit( hsv, hue, 0, 0, 0 ); // 只提取 HUE 分量
{
float max_val = 0.f;
cvSetImageROI( hue, selection ); // 得到选择区域 for ROI
cvSetImageROI( mask, selection ); // 得到选择区域 for mask
cvCalcHist( &hue, hist, 0, mask ); // 计算直方图
cvGetMinMaxHistValue( hist, 0, &max_val, 0, 0 ); // 只找最大值
cvConvertScale( hist->bins, hist->bins, max_val ? 255. / max_val : 0., 0 ); // 缩放 bin 到区间 [0,255]
cvResetImageROI( hue ); // remove ROI
cvResetImageROI( mask );
track_window = selection;
track_object = 1;
bin_w = histimg->width / hdims; // hdims: 条的个数,则 bin_w 为条的宽度
// 画直方图
for( i = 0; i < hdims; i++ )
{
int val = cvRound( cvGetReal1D(hist->bins,i)*histimg->height/255 );
CvScalar color = hsv2rgb(i*180.f/hdims);
cvRectangle( histimg, cvPoint(i*bin_w,histimg->height),
cvPoint((i+1)*bin_w,histimg->height - val),
color, -1, 8, 0 );
}
}
cvAnd( backproject, mask, backproject, 0 );
// calling CAMSHIFT 算法模块
cvCamShift( backproject, track_window,
cvTermCriteria( CV_TERMCRIT_EPS | CV_TERMCRIT_ITER, 10, 1 ),
&track_comp, &track_box );
track_window = track_comp.rect;
if( backproject_mode )
cvCvtColor( backproject, image, CV_GRAY2BGR ); // 使用backproject灰度图像
if( image->origin )
track_box.angle = -track_box.angle;
cvEllipseBox( image, track_box, CV_RGB(255,0,0), 3, CV_AA, 0 );
}
if( select_object && selection.width > 0 && selection.height > 0 )
{
cvSetImageROI( image, selection );
cvXorS( image, cvScalarAll(255), image, 0 );
cvResetImageROI( image );
}
cvShowImage( "Histogram", histimg );
if( c == 27 )
break; // exit from for-loop
switch( c )
{
case 'b':
backproject_mode ^= 1;
break;
case 'c':
track_object = 0;
cvZero( histimg );
break;
case 'h':
show_hist ^= 1;
if( !show_hist )
cvDestroyWindow( "Histogram" );
else
cvNamedWindow( "Histogram", 1 );
break;
default:
;
}
}
cvDestroyWindow("CamShiftDemo");
}