YOLO v3详解
YOLO v3是YOLO和YOLO v2之后的YOLO系列的又一篇目标检测算法,是基于YOLO v2的一个改进,速度更快,精度更高!
1、YOLO v3的网络结构图

其中:
DBL:如图1左下角所示,也就是代码中的Darknetconv2d_BN_Leaky,是yolo_v3的基本组件。就是卷积+BN+Leaky relu。对于v3来说,BN和leaky relu已经是和卷积层不可分离的部分了(最后一层卷积除外),共同构成了最小组件。
resn:n代表数字,有res1,res2, … ,res8等等,表示这个res_block(残缺块)里含有多少个res_unit(残缺单元)。这是yolo_v3的大组件,yolo_v3开始借鉴了ResNet的残缺结构,使用这种结构可以让网络结构更深(从v2的darknet-19上升到v3的darknet-53,前者没有残差结构)。对于res_block的解释,可以在图1的右下角直观看到,其基本组件也是DBL。
concat:张量拼接。将darknet中间层和后面的某一层的上采样进行拼接。拼接的操作和残差层add的操作是不一样的,拼接会扩充张量的维度,而add只是直接相加不会导致张量维度的改变。
整个YOLO v3网络总共252层,组成如下:
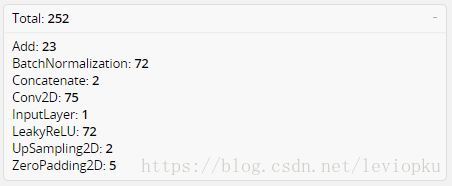
上表可以看出add层23层(主要用于res_block的构成,每个res_unit需要一个add层,一共有1+2+8+8+4=23层),BN层和LeakyReLU层数量完全一样(72层),在网络结构中的表现为:每一层BN后面都会接一层LeakyReLU。卷积层一共有75层,其中有72层后面都会接BN+LeakyReLU的组合构成基本组件DBL。看结构图,可以发现上采样和concat都有2次,和表格分析中对应上。每个res_block都会用上一个零填充,一共有5个res_block。
2、backbone(主干网)
整个v3结构里面,是没有池化层和全连接层的。前向传播过程中,张量的尺寸变换是通过改变卷积核的步长来实现的,比如stride=(2, 2),这就等于将图像边长缩小了一半(即面积缩小到原来的1/4)。在yolo_v2中,要经历5次缩小,会将特征图缩小到原输入尺寸的1/2^5,即1/32。输入为416x416,则输出为13x13(416/32=13)。
yolo_v3也和v2一样,backbone都会将输出特征图缩小到输入的1/32。所以,通常都要求输入图片是32的倍数。可以对比v2和v3的backbone看看:(DarkNet-19 与 DarkNet-53)
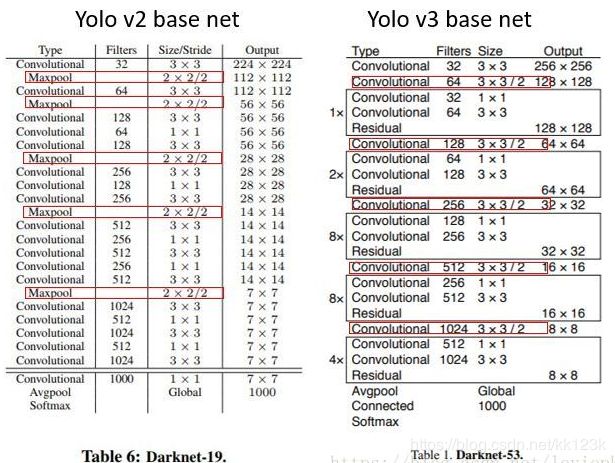
yolo_v2中对于前向过程中张量尺寸变换,都是通过最大池化来进行,一共有5次。而v3是通过卷积核增大步长来进行,也是5次。(darknet-53最后面有一个全局平均池化,在yolo-v3里面没有这一层,所以张量维度变化只考虑前面那5次)。
这也是416x416输入得到13x13输出的原因。从图2可以看出,darknet-19是不存在残缺结构(resblock)的,和VGG是同类型的backbone(属于上一代CNN结构),而darknet-53是可以和resnet-152正面刚的backbone,看下表:

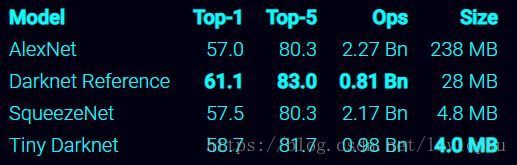
从上表也可以看出,darknet-19在速度上仍然占据很大的优势。其实在其他细节也可以看出(比如bounding box prior采用k=9),yolo_v3并没有那么追求速度,而是在保证实时性(fps>60)的基础上追求精度。另外,YOLO v3还有个轻量级的版本tiny-darknet作为backbone替代darknet-53,其速度超快,在官方代码里用一行代码就可以实现切换backbone。其高速和轻量的特点详情见下表:
3、bounding box的数量变化
还记得每个grid cell都会预测固定数量的bounding box(YOLO v1中是2个,YOLO v2中是5个,YOLO v3中是3个),这几个bounding box的初始size是不一样的,这几个bounding box中只有和ground truth的IOU最大的bounding box才是用来预测该object的。可以看出预测得到的输出feature map有两个维度是提取到的特征的维度,比如13*13,还有一个维度(深度)是B*(5+C),注:YOLO v1中是(B*5+C),其中B表示每个grid cell预测的bounding box的数量,比如YOLO v1中是2个,YOLO v2中是5个,YOLO v3中是3个,C表示bounding box的类别数(没有背景类,所以对于VOC数据集是20),5表示4个坐标信息和一个置信度(objectness score)。
4、bounding box的坐标预测方式
bounding box的坐标预测方式还是延续了YOLO v2的做法。简单讲就是下面这个截图的公式,tx、ty、tw、th就是模型的预测输出。cx和cy表示grid cell的坐标,比如某层的feature map大小是13*13,那么grid cell就有13*13个,第0行第1列的grid cell的坐标cx就是0,cy就是1。pw和ph表示预测前bounding box的size。bx、by。bw和bh就是预测得到的bounding box的中心的坐标和size。坐标的损失采用的是平方误差损失。

5、类别预测方面
类别预测方面主要是将原来的单标签分类改进为多标签分类。因此网络结构上就将原来用于单标签多分类的softmax层换成用于多标签多分类的逻辑回归层。首先说明一下为什么要做这样的修改,原来分类网络中的softmax层都是假设一张图像或一个object只属于一个类别,但是在一些复杂场景下,一个object可能属于多个类,比如你的类别中有woman和person这两个类,那么如果一张图像中有一个woman,那么你检测的结果中类别标签就要同时有woman和person两个类,这就是多标签分类,需要用逻辑回归层来对每个类别做二分类。逻辑回归层主要用到sigmoid函数,该函数可以将输入约束在0到1的范围内,因此当一张图像经过特征提取后的某一类输出经过sigmoid函数约束后如果大于0.5,就表示属于该类。
6、采用多个scale融合的方式做预测
YOLO v3采用多个scale融合的方式做预测。原来的YOLO v2有一个层叫:passthrough layer,假设最后提取的feature map的size是13*13,那么这个层的作用就是将前面一层的26*26的feature map和本层的13*13的feature map进行连接,有点像ResNet。当时这么操作也是为了加强YOLO算法对小目标检测的精确度。这个思想在YOLO v3中得到了进一步加强,在YOLO v3中采用类似FPN的上采样和融合做法(最后融合了3个scale,其他两个scale的大小分别是26*26和52*52),在多个scale的feature map上做检测,
对于小目标的检测效果提升还是比较明显的。前面提到过在YOLO v3中每个grid cell预测3个bounding box,看起来比YOLO v2中每个grid cell预测5个bounding box要少,其实不是!因为YOLO v3采用了多个scale的特征融合,所以boundign box的数量要比之前多很多,以输入图像为416*416为例:(13*13+26*26+52*52)*3和13*13*5相比哪个更多应该很清晰了。
7、关于bounding box的初始尺寸
关于bounding box的初始尺寸还是采用YOLO v2中的k-means聚类的方式来做,这种先验知识对于bounding box的初始化帮助还是很大的,毕竟过多的bounding box虽然对于效果来说有保障,但是对于算法速度影响还是比较大的。作者在COCO数据集上得到的9种聚类结果:(10*13); (16*30); (33*23); (30*61); (62*45); (59*119); (116*90); (156*198); (373*326),这应该是按照输入图像的尺寸是416*416计算得到的。
8、loss function
在YOLO v1中使用了一种叫sum-square error的损失计算方法,就是简单的差方相加而已。但在v3的论文里没有明确提所用的损失函数。其实也是跟YOLO v1类似,只是做了一些小调整。即损失还是四个特性((x,y)、(w,h)、分类和confidence)的损失累加起来,也就是一个loss_function搞定端到端的训练。
9、实验结果
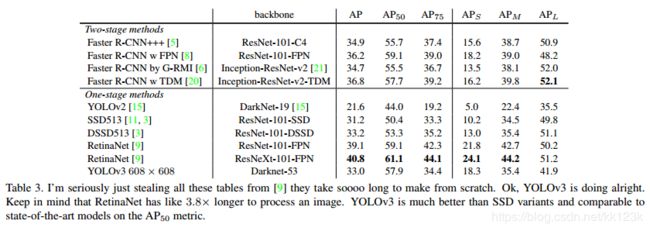
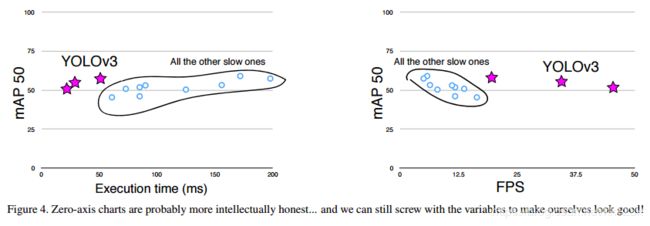
YOLO v3的实验结果对比可以看Table3。原来YOLO v2对于小目标的检测效果是比较差的,通过引入多尺度特征融合的方式,可以看出YOLO v3的APS要比YOLO v2的APS高出不少。
最后这张图非常有意思,直接用All the other slow ones来代表其他算法,实实在在展现了本篇文章随性的风格。
参考:
https://blog.csdn.net/u014380165/article/details/80202337
https://blog.csdn.net/leviopku/article/details/82660381