Android传感器完全解析——电子罗盘app实现
什么是传感器
维基百科是这样定义的:传感器是一种物理装置或生物器官,能够探测、感受外界的信号、物理条件(如光、热、湿度)或化学组成(如烟雾),并将探知的信息传递给其他装置或器官。
常用传感器介绍与用法
Android平台支持三个大类的传感器
- Motion sensors(运动传感器)
这些传感器测量加速力,并沿三个轴的旋转力。此类别包括加速度计,重力感应器, 陀螺仪和旋转矢量传感器。
- Environmental sensors (环境传感器)
这些传感器测量各种环境参数,例如环境空气温度和压力,照明和湿度。此类别包括气压计,光度计,和温度计。
- Position sensors (位置传感器)
这些传感器测量设备的物理位置。这个类别包括方向传感器和磁力计。
传感器实现流程
第一步:得到SensorManager
SensorManager mSensorManager = (SensorManager) mContext
.getSystemService(Context.SENSOR_SERVICE);第二步:注册传感器
Sensor sensor = mSensorManager
.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);
if (null != sensor)
mSensorManager.registerListener(this, sensor,
SensorManager.SENSOR_DELAY_NORMAL);registerListener这个方法有三个参数。
- 第一个参数是传感器数据变化的监听器
我们需要去实现SensorEventListener接口,他里面有两个回调方法,
@Override
public void onSensorChanged(SensorEvent event) {
//当传感器的数值发生变化时调用
}
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {
//传感器的精度发生变化时调用
}onSensorChanged方法只有一个SensorEvent类型的参数event,其中SensorEvent类有一个values变量非常重要,该变量的类型是float[]。但该变量最多只有3个元素,而且根据传感器的不同,values变量中元素所代表的含义也不同。
关于values值的详细含义请看参考文章!!!
- 第二个参数是我们需要监听的传感器
Sensor sensor = mSensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);Sensor.TYPE_ACCELEROMETER则是Android设定传感器类型,这里是指加速度传感器,
- 第三个参数是传感器数据更新数据的速度
有以下四个值可选,他们的速度是递增的
SENSOR_DELAY_UI
SENSOR_DELAY_NORMAL
SENSOR_DELAY_GAME
SENSOR_DELAY_FASTEST
传感器的注销
//注销所有传感器对象
public voidunregisterListener(SensorEventListener listener)
//注销指定的传感器对象
public voidunregisterListener(SensorEventListener listener, Sensor sensor)sensor的获取依旧是通过SensorManager.getDefaultSensor()方法。
获得手机支持的所有传感器
Listsensors = sensorManager.getSensorList(Sensor.TYPE_ALL);Android传感器类型表
- 加速度传感器:TYPE_ACCELEROMETER
以m/s2测量它设备所有三个物理轴线方向(x,y,和z)加速度。
- 周围温度传感器:TYPE_AMBIENT_TEMPERATURE
检测周围空气温度。
- 重力传感器:TYPE_GRAVITY
测量重力
- 陀螺仪传感器:TYPE_GYROSCOPE
以rad/s测量设备三个物理轴线方向(x,y,和z)。旋转速度。
- 光照传感器:TYPE_LIGHT
以lx测量周围的光线级别。
- 线性加速度传感器:TYPE_LINEAR_ACCELERATION
检测沿着一个轴向的加速度。
- 磁力传感器:TYPE_MAGNETIC_FIELD
测量周围的三个物理轴线方向的磁场。
- 方向传感器: TYPE_ORIENTATION
测量设备所有三个物理轴线方向(x,y和x)的旋转角度。
- 压力传感器:TYPE_PRESSURE
测量周围空气气压
- 接近传感器:TYPE_PROXIMITY
检测物体与手机的距离
- 相对湿度传感器:TYPE_RELATIVE_HUMIDITY
检测周围空气相对湿度
- 旋转矢量传感器:TYPE_ROTATION_VECTOR
用于检测运动和检测旋转。
- 温度传感器: TYPE_TEMPERATURE
检测设备的温度
传感器使用实践
这里以方向传感器为例
方向传感器的获取方式
Sensor sensor = sensorManager.getDefaultSensor(Sensor.TYPE_ORIENTATION);上面这个,对,已经被google弃用了,了解就好。
Android中的坐标系 
自己画的有点丑,将就着看吧,Z轴默认垂直于地面,所谓获取的三个Values数组即对应手机与Z,Y,X形成的夹角,后面会说明,
前面说了,TYPE_ORIENTATION已被弃用,那么最新的方向传感器是如何做的呢?
事实上,Android 获取手机旋转的方向和角度是通过加速度传感器和地磁传感器共同计算得出的
OK,我们这时候是需要同时使用两个传感器的,看代码
Sensor accelerometerSensor = sensorManager.getDefaultSensor(Sensor.
TYPE_ACCELEROMETER);
Sensor magneticSensor = sensorManager.getDefaultSensor(Sensor.
TYPE_MAGNETIC_FIELD);
sensorManager.registerListener(listener, accelerometerSensor,
SensorManager.SENSOR_DELAY_GAME);
sensorManager.registerListener(listener, magneticSensor,
SensorManager.SENSOR_DELAY_GAME);同时使用了加速度传感器和地磁传感器
获取旋转矩阵数组R
SensorManager.getRotationMatrix(R, null, accelerometerValues, magneticValues);获取手机旋转数据
SensorManager.getOrientation(R, values);values 是一个长度为 3 的 float 数组,手机在各个方向上的旋转数据都会被存放到这个数组当中。
对应关系:
values[0]->Z轴、values[1]->X轴、values[2]->Y轴
values[0]的取值范围是-180到180 度,其中±180 度表示正南方向,0 度表示正北方向,-90 度表示正西方向,90 度表示正东方向,如图 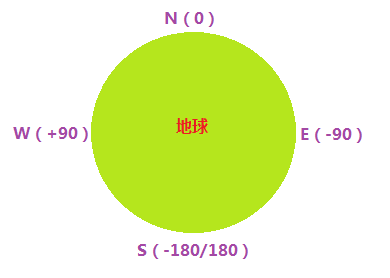
所谓,实践是检验真理的唯一标准,这是我检测后自行画的,大家看一下就明白该怎么根据获取到的角度来做对应的处理了
一个完整的方向传感器封装类
public class DirectionSensorUtils implements SensorEventListener {
private SensorManager sensorManager;
float[] accelerometerValues = new float[3];
float[] magneticValues = new float[3];
float lastRotateDegree;
private ImageView compassImg;//指南针背景图
public DirectionSensorUtils(Context context , ImageView compassImg) {
sensorManager = (SensorManager) context.getSystemService(Context.SENSOR_SERVICE);
this.compassImg = compassImg;
}
//注册传感器
public void registerSensor(){
Sensor accelerometerSensor = sensorManager.getDefaultSensor(Sensor.
TYPE_ACCELEROMETER);
Sensor magneticSensor = sensorManager.getDefaultSensor(Sensor.
TYPE_MAGNETIC_FIELD);
sensorManager.registerListener(this, accelerometerSensor,
SensorManager.SENSOR_DELAY_GAME);
sensorManager.registerListener(this, magneticSensor,
SensorManager.SENSOR_DELAY_GAME);
}
//解除传感器注册
public void unregisterSensor(){
if (sensorManager != null) {
sensorManager.unregisterListener(this);
}
}
@Override
public void onSensorChanged(SensorEvent event) {
// 判断当前是加速度传感器还是地磁传感器
if (event.sensor.getType() == Sensor.TYPE_ACCELEROMETER) {
// 通过clone()获取不同的values引用
accelerometerValues = event.values.clone();
} else if (event.sensor.getType() == Sensor.TYPE_MAGNETIC_FIELD) {
magneticValues = event.values.clone();
}
//获取地磁与加速度传感器组合的旋转矩阵
float[] R = new float[9];
float[] values = new float[3];
SensorManager.getRotationMatrix(R, null, accelerometerValues,
magneticValues);
SensorManager.getOrientation(R, values);
//values[0]->Z轴、values[1]->X轴、values[2]->Y轴
//使用前请进行转换,因为获取到的值是弧度,示例如下
// Math.toDegrees(values[0]);
// Math.toDegrees(values[1]);
// Math.toDegrees(values[2]);
handleEvent(values);
}
public void handleEvent(float[] values){
// 这里实现了一个指南针
float rotateDegree = -(float) Math.toDegrees(values[0]);
if (Math.abs(rotateDegree - lastRotateDegree) > 1) {
RotateAnimation animation = new RotateAnimation
(lastRotateDegree, rotateDegree, Animation.RELATIVE_TO_SELF, 0.5f, Animation.
RELATIVE_TO_SELF, 0.5f);
animation.setFillAfter(true);
compassImg.startAnimation(animation);
lastRotateDegree = rotateDegree;
}
}
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {
}
}OK,还有其他很多传感器,但使用上大体一致,这里将光照、加速度、方向传感器封住为了一个工具类,地址:https://github.com/walkthehorizon/UtilsSet/blob/master/UtilsLibrary/SensorUtils.java,如果对你有帮助欢迎fork、star以及issue,谢谢
推荐阅读:
Android在方向锁定时获取屏幕旋转角度的另一种方式
本文最新更新日期___2016.09.26