【OpenCV 4.0 C++】 Kinect Fusion 使用
【承接图像分类、检测、分割、生成相关项目,私信。】
完整的工程应用:3DFR Star Please
编译源码:
参考这篇博客OpenCV+OpenCV-contrib 编译步骤 ,特别的要勾选OPENCV_ENABLE_NONFREE 在 CMake 中 ,这样才能使用kinect fusion算法。
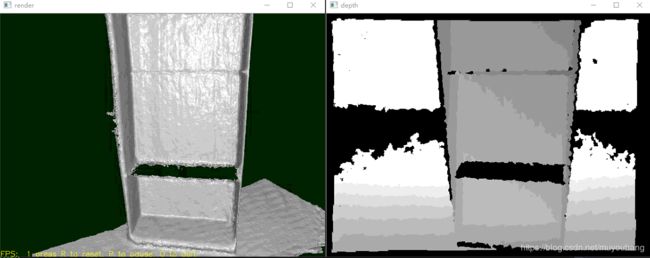
效果图(左:重建后效果图,右:depth图):
Depth 数据(RGBD-dataset): 代码使用到的数据集。
当使用自己的数据集时,应设置自己的cv::kinfu::params ,这涉及到frame_size等重要参数。默认参数如下。
KinFu Params(src code):
Ptr<Params> Params::defaultParams()
{
Params p;
p.frameSize = Size(640, 480);
float fx, fy, cx, cy;
fx = fy = 525.f;
cx = p.frameSize.width/2 - 0.5f;
cy = p.frameSize.height/2 - 0.5f;
p.intr = Matx33f(fx, 0, cx,
0, fy, cy,
0, 0, 1);
// 5000 for the 16-bit PNG files
// 1 for the 32-bit float images in the ROS bag files
p.depthFactor = 5000;
// sigma_depth is scaled by depthFactor when calling bilateral filter
p.bilateral_sigma_depth = 0.04f; //meter
p.bilateral_sigma_spatial = 4.5; //pixels
p.bilateral_kernel_size = 7; //pixels
p.icpAngleThresh = (float)(30. * CV_PI / 180.); // radians
p.icpDistThresh = 0.1f; // meters
p.icpIterations = {10, 5, 4};
p.pyramidLevels = (int)p.icpIterations.size();
p.tsdf_min_camera_movement = 0.f; //meters, disabled
p.volumeDims = Vec3i::all(512); //number of voxels
float volSize = 3.f;
p.voxelSize = volSize/512.f; //meters
// default pose of volume cube
p.volumePose = Affine3f().translate(Vec3f(-volSize/2.f, -volSize/2.f, 0.5f));
p.tsdf_trunc_dist = 0.04f; //meters;
p.tsdf_max_weight = 64; //frames
p.raycast_step_factor = 0.25f; //in voxel sizes
// gradient delta factor is fixed at 1.0f and is not used
//p.gradient_delta_factor = 0.5f; //in voxel sizes
//p.lightPose = p.volume_pose.translation()/4; //meters
p.lightPose = Vec3f::all(0.f); //meters
// depth truncation is not used by default
//p.icp_truncate_depth_dist = 0.f; //meters, disabled
return makePtr<Params>(p);
}
下面的代码是精简过的,去掉了摄像头的相关部分,毕竟一般也用不到。
Kinect Fusion 使用样例代码(demo code) :
#include