LOAM study notes
LOAM study notes
paper reading
This paper is writed by PHD Ji zhang and Prof Sanjiv Singh.Paper propose a new way to solve 3D lidar SLAM problem with low-drift and real time.
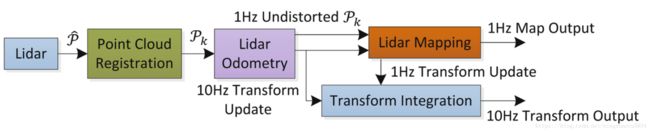
In my view,this paper mainly combine two algorithms.One algorithm names lidar odometry, processing the feature points by 10hz to get estimate velocity of the lidar.(a IMU can be used to get accurate estimation).Another algorithm names lidar mapping,process more feature points by 1hz to match new cloud points to the map and extent the map.
Step 1:Cloud points registration
- Extract feature points from lidar cloud points by formula (1).maximum c means edge points and minimum c means planar points.

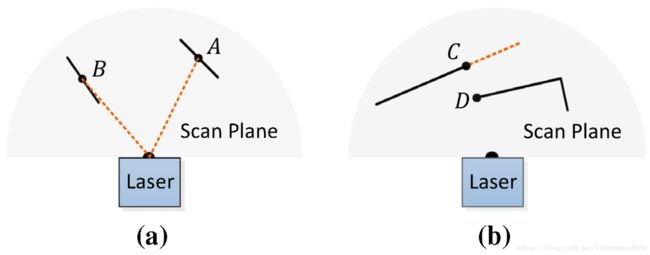
- Process special feature points to avoid points whose surrounded points are selected,or points on local planar surfaces that are roughly parallel to the lidar beams(a),or points on boundary of occluded region(b).
Step 2:Finding feature point correspondence
- For each point in ε~k ε ~ k and H~k H ~ k ,find the closest neighbor point in P¯k−1 P ¯ k − 1
- Use KD_tree for fast index
- For point i∈ε~k i ∈ ε ~ k ,find j in P¯k−1 P ¯ k − 1 and l in the preceding and following two scans.(j and l are from different scans)
- compute the feature point to line distance or to plane distance by formula (2) or (3).


Step 3:Motion estimation
- The lidar motion is modeled with constant angular and linear velocities during a sweep.First using linear interpolate ways merging the points in a sweep to a time stamp.
- project εk ε k and Hk H k to the beginning of the sweep by formula(6)==symbol description 13;
- Combine 2,6 and 3,6 ,get the geometric relationship between the edge or planar feature point and the corresponding edge line or the planar patch.In formula (7)(8);
- Solve formula (9) to get TLk(t) T k L ( t )
Step 4:Lidar odometry algorithm
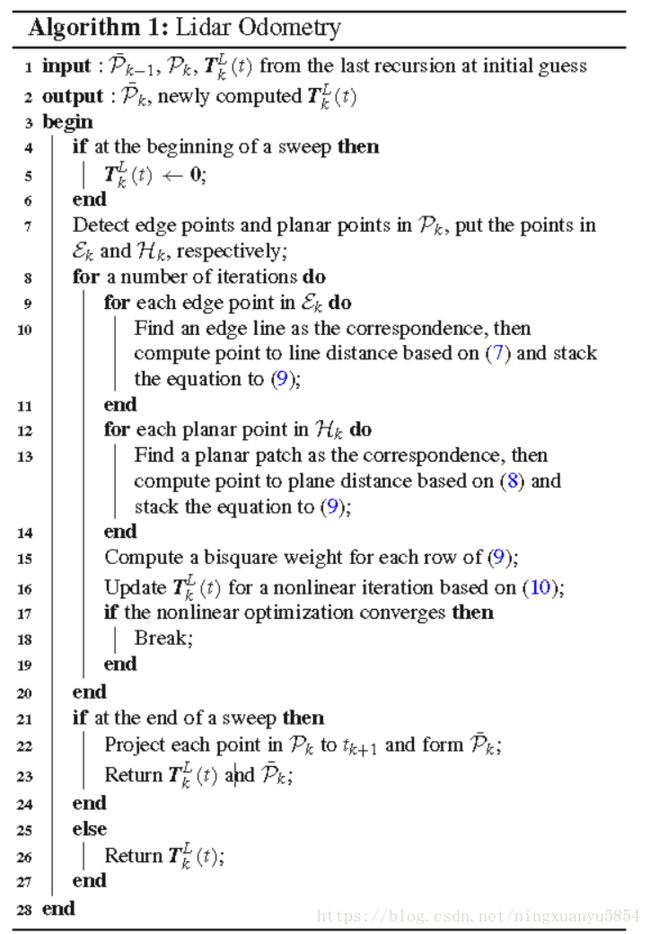
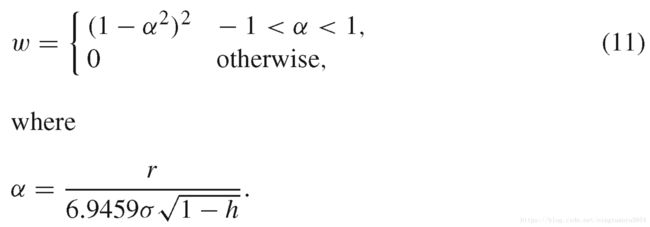
- Compute a bisquare weight for each feature points.
- Through formula(10) ,try to find the convergence.From TLk(t) T k L ( t ) we can easily estimate the lidar motion.
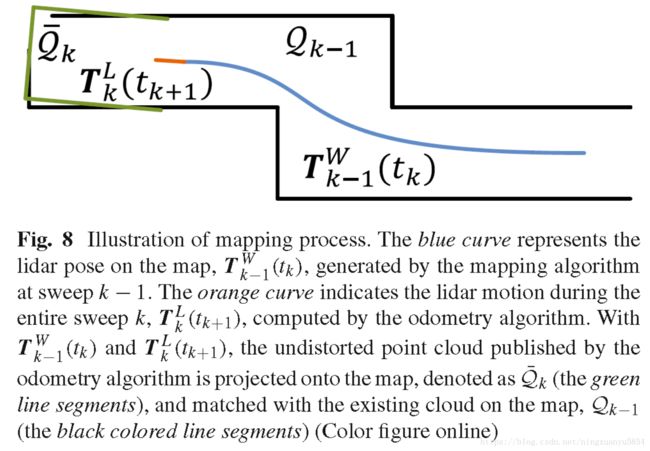
Step 5:Lidar mapping
Symbol description:
- Pk P k :Combined point cloud during sweep k
- P¯k P ¯ k :The projected point cloud.(Correct the influence of lidar motion during time gap.project a sweep of points to a tome stamp.k-1 sweep points project to time stamp k;)
- εk ε k :edge points set during sweep k
- Hk H k :planar points set during sweep k
- ε~k ε ~ k :projected edge points set
- H~k H ~ k :projected planar points set
- TLk(t)=[τLk(t),θLk(t)]T T k L ( t ) = [ τ k L ( t ) , θ k L ( t ) ] T :lidar pose transform between [ tk t k ,t];(in sweep k)
- τLk(t)=[tx,ty,tz]T τ k L ( t ) = [ t x , t y , t z ] T :translation in Lk L k
- θLk(t)=[θx,θy,θz]T θ k L ( t ) = [ θ x , θ y , θ z ] T :rotation in Lk L k
- t(k,i) t ( k , i ) :point i’s time stamp in Pk P k
- TL(k,i)=t(k,i)−tkt−tkTLk(t) T ( k , i ) L = t ( k , i ) − t k t − t k T k L ( t ) :pose transform between [ tk t k ,t_{(k,i)}];
- XL(k,i) X ( k , i ) L :a point in εk ε k and Hk H k
- X~L(k,i)=RL(k,i)XL(k,i)+τL(k,i) X ~ ( k , i ) L = R ( k , i ) L X ( k , i ) L + τ ( k , i ) L :corresponding point in ε~k ε ~ k and H~k H ~ k
- RL(k,i) R ( k , i ) L , τL(k,i) τ ( k , i ) L :rotation matrix and translation vector corresponding to TL(k,i) T ( k , i ) L