Windows / Ubuntu操作系统下Pixhawk原生固件PX4的编译方法
欢迎交流~ 个人 Gitter 交流平台,点击直达:
更新于2017.3.13
FAQ
本文说明针对 PX4 Firmware 1.6.0
- 问题 1: 找不到python jinja2模块
CMake Error at /usr/share/cmake-3.2/Modules/FindPackageHandleStandardArgs.cmake:138 (message):
couldn't find python module jinja2:
for debian systems try:
sudo apt-get install python-jinja2
or for all other OSs/debian:
pip install jinja2
(missing: PY_JINJA2)
Call Stack (most recent call first):
/usr/share/cmake-3.2/Modules/FindPackageHandleStandardArgs.cmake:374 (_FPHSA_FAILURE_MESSAGE)
cmake/common/px4_base.cmake:1295 (find_package_handle_standard_args)
CMakeLists.txt:276 (px4_find_python_module)
-- Configuring incomplete, errors occurred!
解决方案:缺什么安什么
Windows系统下:
pip install jinja2Linux系统下:
sudo apt-get install python-jinja2
- 问题 2: Windows下出现
rsync error错误
The source and destination cannot both be remote
rsync error: syntax or usage error (code 1) at /usr/src/rsync/rsync-3.0.8/main.c(1148) [receiver=3.0.8]
make[3]: *** [nuttx_copy_px4fmu-v2.stamp] Error 1
make[2]: *** [CMakeFiles/nuttx_copy_px4fmu-v2.dir/all] Error 2
make[2]: *** Waiting for unfilished jobs....
The source and destination cannot both be remote
rsync error: syntax or usage error (code 1) at /usr/src/rsync/rsync-3.0.8/main.c(1148) [receiver=3.0.8]
make[3]: *** [src/modules/px4iofirmware/nuttx_copy_px4fmu-v2.stamp] Error 1
make[2]: *** [src/modules/px4iofirmware/nuttx_copy_px4fmu-v2.dir/all] Error 2
make[1]: *** [all] Error 2
make[1]: *** [px4fmu-v2_default] Error 2
解决方案:cmake nuttx rsync 仅使用相对路径进行复制
对Firmware/cmake/nuttx/px4_impl_nuttx.cmake文件进行更改,点击传送门
- **问题 3:**内存溢出
collect2.exe:error:ld returned 1 exit status
make[3]: *** [src/firmware/nuttx/firmware_muttx] Error 1
make[2]: *** [src/firmware/nuttx/CMakeFiles/firmware_muttx.dir/all] Error 2
make[1]: *** [all] Error 2
make: *** [px4fmu-v2_default] Error 2
解决方案:移除不是必要的模块. 配置在这里. 为了移除一个模块, 可以直接注释掉它:
对于FMUv2(Pixhawk1)或者FMUv3(Pixhawk 2)硬件,找到Firmware/cmake/configs/nuttx_px4fmu-v2_default.cmake
修改为:
#drivers/trone
即可
- 问题 4: gcc 版本
解决方案:gcc 4.8.4 已经过时了,目前支持的是 4.9.4还有 5.4.3版本。
正文
各个论坛以及QQ群中经常有人反应不知道怎么编译Pixhawk原生固件PX4,笔者也为这个问题苦恼了很久,最近一时兴起,想尝试下官网的写一个应用程序,但是原生代码都编译不过这可怎么能行,于是东查西试,解决了在Windows操作系统以及Ubuntu操作系统上编译PX4固件的问题。
Windows 7 64bit
软件安装
首先,需要安装一些软件,CMake、32位的Java jdk以及PX4 Toolchain Installer。
CMake的话笔者使用的是CMake-3.3.2-win32-x86版本。
关于CMake的安装有一点需要注意,在第三步Install Options安装选项中,需要将CMake加入到系统路径中:

Java sdk:
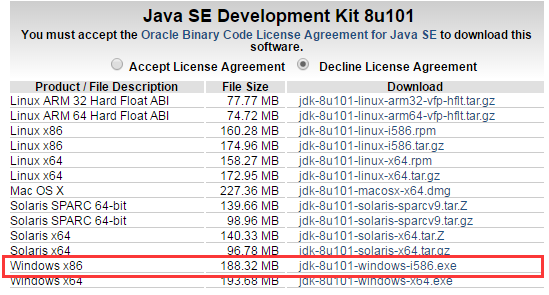
Eclipse 需要 Java,用命令 java -version 来查看 Java 是否配置 成功。

接下来进行PX4固件相关的配置,安装PX4 Toolchain Installer,默认安装在C盘根目录下,笔者不服,非要安装在D盘,安装的时候一路下一步就行。

安装完以后在开始菜单会出现一套工具链包括,PX4Console、PX4Ecplise.

代码编译
打开PX4console,下载PX4固件,输入指令:
git clone https://github.com/PX4/Firmware.git
切换到Firmware文件夹,输入指令:
cd Firmware
之后输入指令:
git submodule update --init --recursive
(根据网速耗时有差异,耐心等待)
关键一步
在开始最后的编译之前,有一个步骤必不可少,将arm-none-eabi-gcc 4.7.4换成4.9.4或5.4.3,下载4.9.4版本的压缩文件,5.4.3版本。
解压后将这四个文件夹复制并替换到PX4Toolchain安装目录下的toolchain文件夹下,这里笔者替换到的文件夹为D:\px4\toolchain。

随后启动PX4 Console控制台进行编译,先进入Firmware文件夹,输入指令:
cd Firmware
进行编译
make px4fmu-v2_default
(漫长的等待,可能需要半个小时)
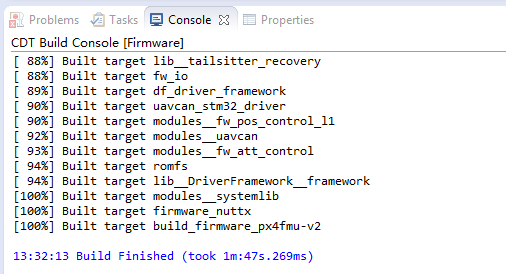
编译成功的界面如下:

如果在没有进行arm-none-eabi-gcc 4.7.4替换的情况下直接进行固件编译,则会出现如下所示的错误:

为时不晚,依然来得及将下载好的4.9.4版arm-none-eabi-gcc解压并替换掉Toolchain文件夹下的相应文件。
之后重启PX4Console控制台,首先还是先进入到Firmware文件夹下:
cd Firmware
输入指令:
make clean
清除上一次的编译,然后重新编译,输入指令:
make px4fmu-v2_default
(又是漫长的等待,但是等待都是值得的)
固件烧录
将飞控板通过USB连接电脑,输入以下指令即可完成固件的烧录:
make px4fmu-v2_default upload
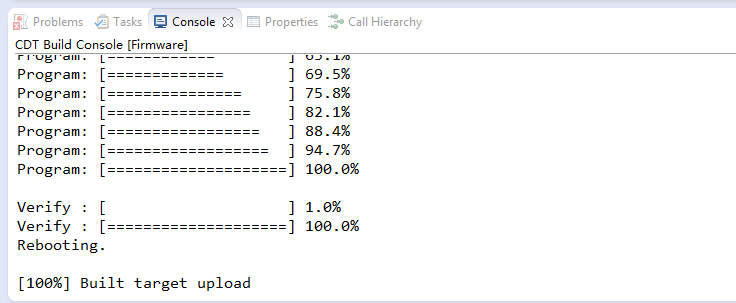
烧录成功的界面如下图:

配置Eclipse
现在控制台已经编译成功了,接下来就是进行Eclipse的配置了
- 打开PX4Eclipse。
第一次启动时,选择好workplace,并勾选Use this as the default and……。由于笔者以D盘作为工作目录,因此这里依然保持将workplace放置在D盘。

- 建立工程
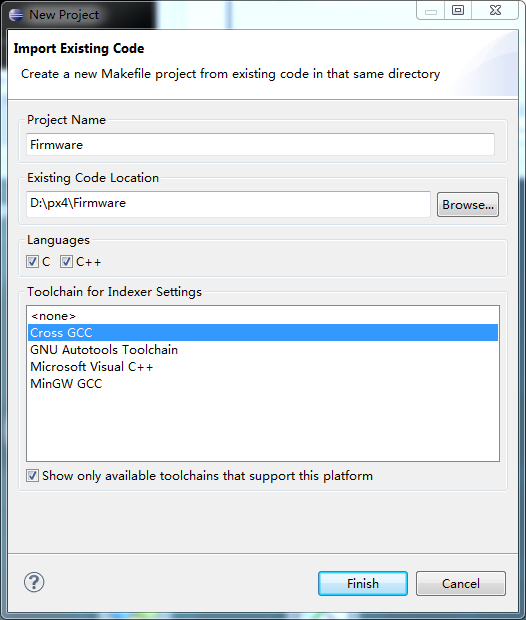
File -> New -> Makefile Project with Existing Code。
然后点击Browse……到D:\px4\Firmware,并选择Cross GCC,点击Finish。
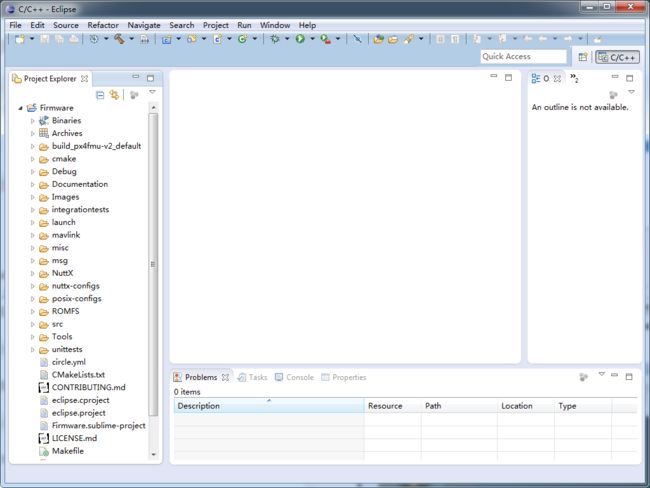
然后进入Workbench:

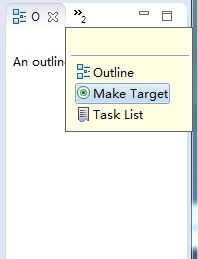
- 创建编译目标
可以在右边板块中Make Target( 或者菜单 Window -> Show View -> Make Target 也可以打开),选中根文件夹(Firmware),可以创建新的 make Target(绿色圆形按钮)。 如创建目标 px4fmu-v2_default
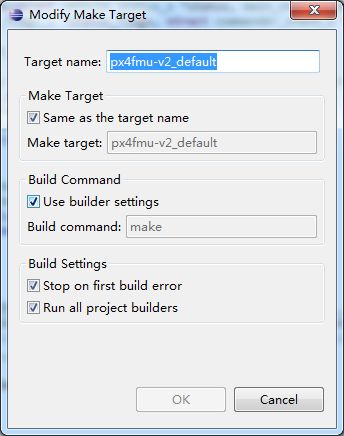
px4fmu-v2_default创建好如下:
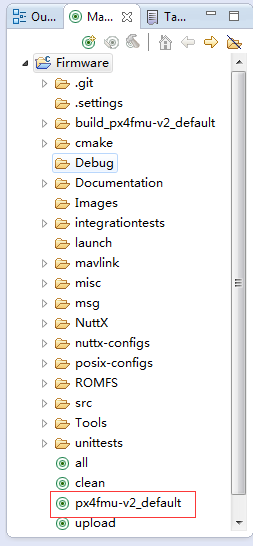
同理创建目标:all,archives,clean,distclean,px4io-v2_default, px4fmu-v2_default upload
- 各 make target 说明
- clean – 删除编译的固件相关文件,不会清除archives
- px4fmu-v2_default—FMU 固件
- px4fmu-v2_default upload – 烧录固件到飞控板
**提示:**与make有关的指令可以用Firmware/Makefile文件中查看
-
路径配置
必须配置好Eclipse软件的路径才能进行编译,这一步至关重要。
打开eclipse软件,打开目录栏的Project -> Priorities

有点意思的是,你得先打开左边Firmware中的随便一个文件,否则Priorities这一项会是灰色的,无法进行操作。
打开相应栏,更改CWD、PWD的路径:
开始的路径(如果装在默认路径则为C:\px4)
然后你的CWD路径为 C:\px4\Firmware
这里将路径改为 /D/px4/Firmware
差别不大,还望仔细,笔者当时在这个问题上可是纠结了特别久,无限的报错,not contain Cmakelists.txt。也是得到高人相助,开始人指出来笔者还根本看不出,然后仔细的发现原来是:“\”、“/”“这样的问题。
然后再将PWD的路径也做相应的更改。 -
编译固件
点击上述Target中的px4fmu-v2_default,即可进行编译。此操作与在Console控制台中输入make有同样的效果。
- 烧录固件
固件的烧录可以直接使用QGC地面站进行。也可以在PX4 Console或者PX4 Eclipse中进行,编译成功后在PX4 Eclipse界面右侧点击Target中的px4fmu-v2_default upload即可进行固件的烧录。这样就可以将自己的算法加入到原生固件中了。
至此,在Windows环境下编译Pixhawk原生固件PX4的操作已经完成。
Ubuntu 14.04 LTS
笔者同时也进行了Ubuntu上的环境搭建。跟随大流,笔者安装了Ubutnu 14.04 LTS虚拟机,64位操作系统。
在Ubuntu上搭建环境相对简单许多,按照PX4中文维基官网的教程即可。
工具链安装
- 权限设置
把用户添加到用户组 “dialout”(如果这步没做,会导致很多用户权限问题):
sudo usermod -a -G dialout $USER
然后注销后,重新登录,因为重新登录后所做的改变才会有效
- 安装CMake
sudo add-apt-repository ppa:george-edison55/cmake-3.x -y
sudo apt-get update
# 必备软件(python、git、qt)
sudo apt-get install python-argparse git-core wget zip \
python-empy qtcreator cmake build-essential genromfs -y
# 仿真工具
sudo add-apt-repository ppa:openjdk-r/ppa
sudo apt-get update
sudo apt-get install openjdk-8-jre
sudo apt-get install ant protobuf-compiler libeigen3-dev libopencv-dev openjdk-8-jdk openjdk-8-jre clang-3.5 lldb-3.5 -y
- 卸载模式管理器
Ubuntu配备了一系列代理管理,这会严重干扰任何机器人相关的串口(或usb串口),卸载掉它也不会有什么影响。
sudo apt-get remove modemmanager
- 更新包列表和安装下面的依赖包
sudo add-apt-repository ppa:terry.guo/gcc-arm-embedded -y
sudo add-apt-repository ppa:team-gcc-arm-embedded/ppa
sudo apt-get update
sudo apt-get install python-serial openocd \
flex bison libncurses5-dev autoconf texinfo build-essential \
libftdi-dev libtool zlib1g-dev \
python-empy gcc-arm-none-eabi -y
代码编译
根据PX4中文维基官网教程。
- 安装Git
sudo apt-get install git-all
- 下载代码
mkdir -p ~/src
cd ~/src
git clone https://github.com/PX4/Firmware.git
- 初始化
先进入Firmware文件夹,进而进行初始化、更新子模块操作,耐心的等待……
cd Firmware
git submodule update --init --recursive
- 编译
在上一步的操作结束之后,即可进行编译:
make px4fmu-v2_default
注意到“make”是一个字符命令编译工具,“px4fmu-v2”是硬件版本,“default”是默认配置,所有的PX4编译目标遵循这个规则。
与Windows环境中相同,这里也可能因为gcc-arm-none-eabi版本不对,需要进行版本升级到4.9.4,方法如下:
- 下载gcc-arm-none-eabi 4.9.4,对于的文件夹命名为arm-none-eabi-4_9-2014q3
wget https://launchpad.net/gcc-arm-embedded/4.9/4.9-2015-q3-update/+download/gcc-arm-none-eabi-4_9-2015q3-20150921-linux.tar.bz2
- 去旧迎新
pushd .
# => 卸载新版的gcc-arm-none-eabi
sudo apt-get remove gcc-arm-none-eabi
# => 安装下载好的gcc-arm-none-eabi
tar -jxf gcc-arm-none-eabi-4_9-2015q3-20150921-linux.tar.bz2
sudo mv gcc-arm-none-eabi-4_9-2015q3 /opt
exportline="export PATH=/opt/gcc-arm-none-eabi-4_9-2015q3/bin:\$PATH"
if grep -Fxq "$exportline" ~/.profile; then echo nothing to do ; else echo $exportline >> ~/.profile; fi
# => 使路径生效
. ~/.profile
popd
对于GCC5.4.3版本的下载:
wget https://launchpad.net/gcc-arm-embedded/5.0/5-2016-q2-update/+download/gcc-arm-none-eabi-5_4-2016q2-20160622-linux.tar.bz2
其余操作不再赘述
PX4 中文维基 同步更新。
笔者装的是Ubuntu 64位系统,而上述arm-none-eabi是直接下载的编译好的32位,还需要安装一个东西
sudo apt-get install lsb-core
可以检查arm-none-eabi 4.9是否安装成功,输入以下指令:
arm-none-eabi-gcc --version
如果出现如下信息,交叉编译环境搭建就没有什么问题了
~$ arm-none-eabi-gcc --version
arm-none-eabi-gcc (GNU Tools for ARM Embedded Processors) 4.9.3 20150529 (release) [ARM/embedded-4_9-branch revision 227977]
Copyright (C) 2014 Free Software Foundation, Inc.
This is free software; see the source for copying conditions. There is NO
warranty; not even for MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.
- 编译
cd ~/src/Firmware
make px4fmu-v2_default
进入Firmware所在的文件夹,make成功后,显示如下:

Ninja
Ninja比Make更快,并且PX4的CMake生成器可以支持它。不幸的是,Ubuntu目前只支持一个非常过时的版本。
这里博主下载二进制文件并添加到系统路径来安装最新版本的Ninja:
mkdir -p $HOME/ninja
cd $HOME/ninja
wget https://github.com/martine/ninja/releases/download/v1.6.0/ninja-linux.zip
unzip ninja-linux.zip
rm ninja-linux.zip
exportline="export PATH=$HOME/ninja:\$PATH"
if grep -Fxq "$exportline" ~/.profile; then echo nothing to do ; else echo $exportline >> ~/.profile; fi
. ~/.profile
按上面的方法配置好ninja之后,以后每次一make都会调用它,这样编译速度会更快。
如果不想使用ninja的话,可以将其从’~/.profile’中注释掉。
#export PATH=/home/fantasy/ninja:$PATH
Qt Creator
Qt Creator是官方唯一支持的IDE,在Ubuntu上针对PX4固件使用,便于看代码的同时也可以进行编译烧录。
- 安装Qt
sudo apt-get install qtcreator
Qt Creator的常见功能如下:
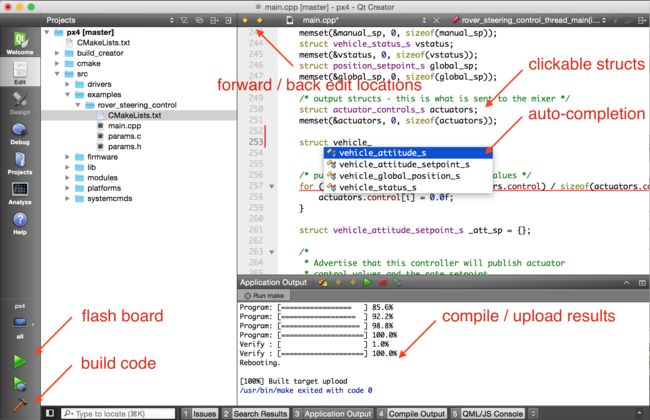
在打开Qt之前,应该创建project文件:
cd ~/src/Firmware
mkdir ../Firmware-build
cd ../Firmware-build
cmake ../Firmware -G "CodeBlocks - Unix Makefiles"
#可以发现Firmware-build目录生成了一些文件
提个醒: 按照官网上面最后一行的命令,当前使用Qt编译得到的将是build px4 ,因为默认的编译指令是
make posix_sitl_default,这不是大家所期待的结果。解决方案:对于,Pixhawk硬件,将最后一行改成
cmake ../Firmware -G "CodeBlocks - Unix Makefiles" -DCONFIG=nuttx_px4fmu-v2_default其他例如使用FMUv4的用户请根据需求进行替换。
-
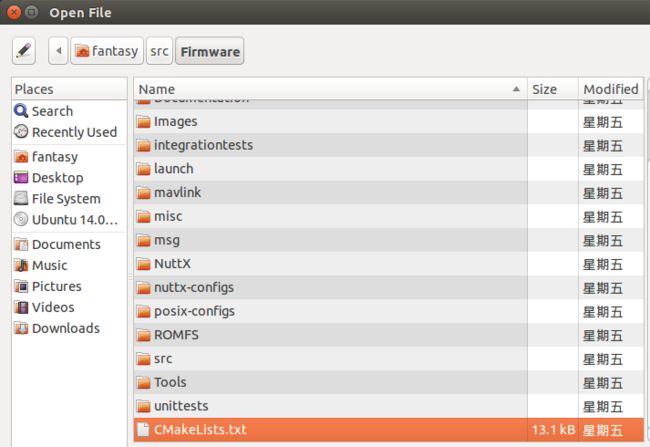
打开Qt

Ubuntu用户只要导入主文件夹里的CMakeLists.txt文件就可以了,打开Qt,通过File -> Open File or Project -> 选择CMakeLists.txt (默认位置在Firmware文件夹根目录下)
-
项目配置
选择src/Firmware-build作为构建目录

运行设置

-
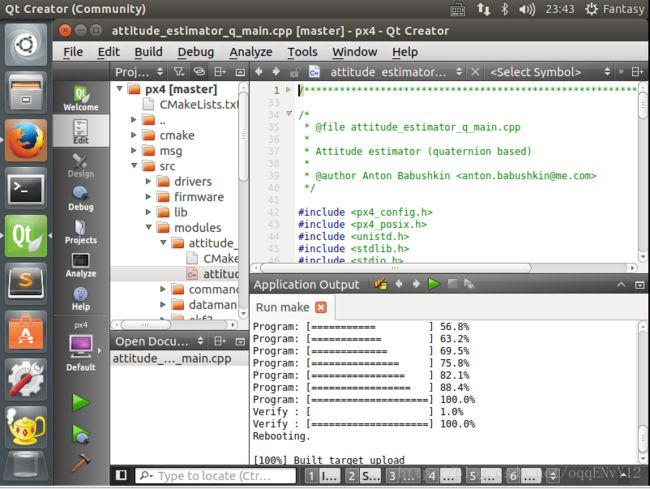
编译

-
上传
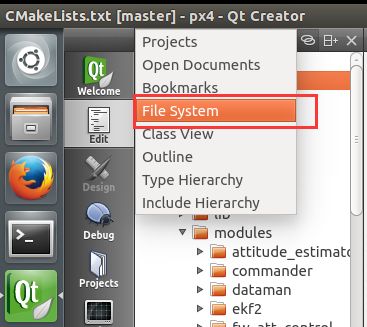
笔者刚开始的时候发现Qt中默认显示的固件不全,很多文件都没有显示,如下图所示

进行下面的操作就哦可了

Eclipse on Ubuntu
在Windows下习惯了使用Eclipse的用户也可以直接在Ubuntu下使用Eclipse进行开发,与Qt一样,这也是一款跨平台的IDE。
就是Java配置有点复杂,用起来却是非常方便的,除了不用更改环境设置,其他的都与Windows下无异,此处不在赘述。
一个很棒的特点就是Ubuntu下的Eclipse可以直接加中文注释,这是别的编译器没有的,我尝试了用Sublime看代码,定义跳转不太给力,Qt打开工程很慢。
目前为止最好的方法还是虚拟机,Windows改一行代码编译上传可能需要五分钟,非常费劲,但是Ubuntu可以说是极速。但是Windows下有很多好用的工具便于调试,Source Insight看代码也是很给力。虚拟机完美。
至此,在Windows已经Ubuntu下的环境搭建已经全部搭建成功。
现在是2016.7.26 19:37 为了确保方法的有效性,笔者已经在都装有Ubuntu虚拟机的笔记本和台式机上用上述方法完成了两种系统下环境搭建、代码编译的复现,亲测有效。
Tips
下载特定版本的固件
PX4Firmware有非常多的发行版,可以从这里看到。
也可以在这里进行选择:
其实下载链接都是https://github.com/PX4/Firmware.git。
~$:cd ~/src/Firmware
# 查看标签(版本)
~$:git tag
...
v1.4.0rc1
v1.4.0rc2
v1.4.0rc3
v1.4.0rc4
v1.4.1rc1
v1.4.1rc2
...
# 新建一个工作分区并切换到目标版本
git checkout -b branch_name tag_name
这样就可以使用你想要的任意版本固件进行开发了。(因为可能有的版本确实不太稳定)
Makefile
# Don't be afraid of this makefile, it is just passing
# arguments to cmake to allow us to keep the wiki pages etc.
# that describe how to build the px4 firmware
# the same even when using cmake instead of make.
Makefile只是将参数传递给cmake。所有与make相关的指令都可以在这里找到,也可以自定义编译指令,比如
# explicity set default build target
fantasy: px4fmu-v2_default
于是博主编译固件变成下面这个样子:
~$:~/src/Firmware $ make fantasy
PX4 CONFIG: px4fmu-v2_default
ninja: no work to do.
做这些只为让遇到相同问题的人少走弯路,专注核心问题,这也是笔者开展PX4中文维基汉化项目的初衷。
还望志同道合的你们多多支持!~
Just Enjoy It .
By Fantasy