Pixhawk原生固件PX4之串口添加读取传感器实现
欢迎交流~ 个人 Gitter 交流平台,点击直达:
本博客承接前一篇,对FreeApe的串口添加超声波传感器博文后半部分进行学习。
为什么叫前奏呢,因为用了伪传感器,把单片机用串口发送的有规律的数据当作了传感器读取到的数据。但是无碍的。
开发环境:Ubuntu Firmware 1.4.1
在无人机运行时,首先是要将应用随系统启动时就启动起来的,且将获得的超声波数据不断的发布出去,从而让其他应用得以订阅使用。这里也使用Pixhawk里面的通用模式,即主线程,检测app命令输入,创建一个线程来不断的发布数据。
定义主题和发布主题
- 在
Firmware/msg目录下新建read_uart_sensor.msg文件。传送门
char[4] datastr
int16 data
#TOPICS read_uart_sensor
并添加到CMakeLists.txt中,编译后自动生成uORB/topics/read_uart_sensor.h头文件
串口读取例程
在Firmware/src/modules目录下新建文件夹read_uart_sensor
- 添加文件
read_uart_sensor.c。传送门
/*
* read_uart_sensor.c
*
* read sensor through uart
*/
#include - 添加
CMakeLists.txt文件
set(MODULE_CFLAGS)
px4_add_module(
MODULE modules__read_uart_sensor
MAIN read_uart_sensor
COMPILE_FLAGS
-Os
SRCS
read_uart_sensor.c
DEPENDS
platforms__common
)
# vim: set noet ft=cmake fenc=utf-8 ff=unix :
- 在
Firmware/cmake/configs/nuttx/nuttx_px4fmu-v2_default.cmake中注册该模块
测试发布的主题
- 测试可以随便一个启动的app中进行主题订阅,然后将订阅的数据打印出来,看是否是超声波的数据。这里新建一个应用px4_test进行测试。
px4_test.c
/*
* px4_test.c
*
* test the uart sensor app
*/
#include 编译并上传固件
- make px4fmu-v2_default upload
在NSH中测试
- read_uart_sensor start /dev/ttyS2
- px4_test
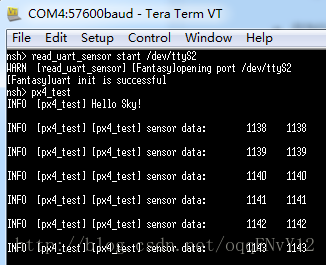
这个大有搞头!
添加到脚本文件
在rcS中仿照mavlink的启动方式添加了上面的应用,使得与ttyS2连接的外设默认为启动状态

现在如果ttyS2上连接了设备,就是自动启动的,在nsh中可以直接调用px4_test应用就可以读取数据了,与使用px4_simple_app读取内部传感器的方式无异。
大致模型就是这样了,接下来就是具体的代码优化以及应用了。
By Fantasy