ocr图像预处理-图像分割、文字方向校正
说明:文字方向校正(fft方式和放射变换方式)参考了网上的代码,只做了少量修改
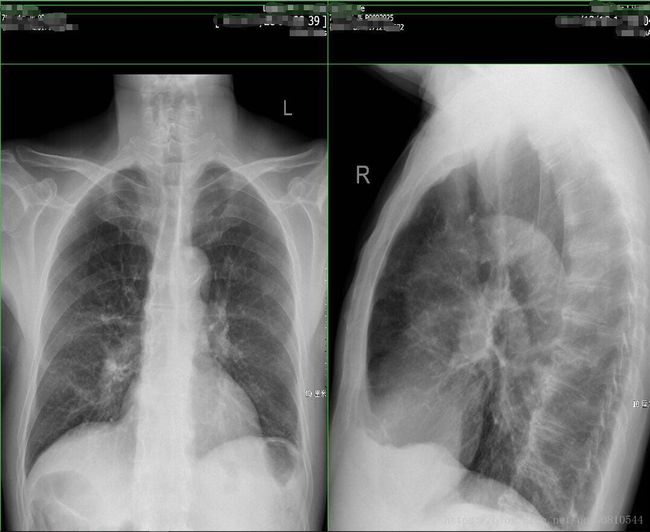
只针对医疗影像图像,自然场景下的另说
因为处理的图像都很大很大,居然有11000*12000这种分辨率的,有90M大小,我也是醉了,绝大部分都是6000左右分辨率的图像,这种图像直接送到CTPN里的话,效果不是太好,太大了 而且效率感人,所以必须做一下预处理。大部分的X光图像很简单,直接缩放送CTPN即可,而CT和MRI图像虽然一张上有很多小图像,但好在要么有虚线分割要么中间都会留有空白的地方,于是就可以利用直线检测和投影检测来把图片分割成若干小图像了。(吐槽一下之前老外写的代码,不管三七二十一把所有图像都是分成上下两部分,然后上下再各分成上下两部分,四个部分再分别循环他的N个算法,搞的整个系统70%以上的资源都在跑OCR,一张很简单的图片最低也要几分钟才能出结果,复杂一点的都是10几分钟 真想知道这是怎么过验收的!)
- 图像分割,思想很简单 有虚线的直接做直线检测,有空白的做X、Y轴的投影,都没有的就是X光图像了,直接把整张图像当做ROI送CTPN
def _img_split_with_hough(img, min=100, max=220):
"""
:param img: 读入的二值化图
:param min: 边缘检测阈值
:param max: 边缘检测阈值
:return: 水平和垂直线的坐标集合
"""
h = img.shape[0]
w = img.shape[1]
edges = cv2.Canny(img, min, max)
lines = cv2.HoughLinesP(edges, 1, np.pi / 180, 30, minLineLength=100, maxLineGap=10)
lines1 = lines[:, 0, :]
h_line = []
v_line = []
for x1, y1, x2, y2 in lines1[:]:
if y2 == y1:
flag = False
for element in h_line:
if abs(element[1] - y1) < 10:
flag = True
break
if flag == False and abs(x1 - x2) > w * 0.5:
h_line.append((x1, y1, x2, y2))
elif x1 == x2:
flag = False
for element in v_line:
if abs(element[0] - x1) < 10:
flag = True
break
if flag == False and abs(y1 - y2) > h * 0.5:
v_line.append((x1, y1, x2, y2))
return h_line, v_line
def _img_split_with_shadow(gray_img, threshold_value=180):
"""
:param binary_img: 读入的灰度图
:param img_show:
:return: 水平和垂直线的坐标集合
"""
h = gray_img.shape[0]
w = gray_img.shape[1]
# 按行求和
sum_x = np.sum(gray_img, axis=1)
# 按列求和
sum_y = np.sum(gray_img, axis=0)
h_line_index = np.argwhere(sum_x < 10)
v_line_index = np.argwhere(sum_y < 10)
h_line_index = np.reshape(h_line_index, (h_line_index.shape[0],))
v_line_index = np.reshape(v_line_index, (v_line_index.shape[0],))
h_line = [(0, h_line_index[0], w - 1, h_line_index[0]), (0, h_line_index[-1], w - 1, h_line_index[-1])] if len(
h_line_index) > 0 else []
v_line = [(v_line_index[0], 0, v_line_index[0], h - 1), (v_line_index[-1], 0, v_line_index[-1], h - 1)] if len(
v_line_index) > 0 else []
for i in range(len(h_line_index) - 1):
if h_line_index[i + 1] - h_line_index[i] > 2:
h_line.append((0, h_line_index[i], w - 1, h_line_index[i]))
for i in range(len(v_line_index) - 1):
if v_line_index[i + 1] - v_line_index[i] > 2:
v_line.append((v_line_index[i], 0, v_line_index[i], h - 1))
return h_line, v_line
def _combine_rect(h_lines, v_lines, w, h):
rects = []
# 添加第一行(列)和最后一行(列)
x_axis = sorted(set([0, w - 1] + [item[0] for item in v_lines]))
y_axis = sorted(set([0, h - 1] + [item[1] for item in h_lines]))
point_list = []
for y in y_axis:
point = []
for x in x_axis:
point.append((y, x))
point_list.append(point)
for y_index in range(len(y_axis) - 1):
if y_axis[y_index + 1] - y_axis[y_index] <= 10:
continue
for x_index in range(len(x_axis) - 1):
if x_axis[x_index + 1] - x_axis[x_index] <= 10:
continue
rects.append((y_axis[y_index], x_axis[x_index],
y_axis[y_index + 1], x_axis[x_index + 1]))
return rects
def img_split(img_file, threshold_value=180, img_show=False):
"""
:param img_file: 输入图片路径
:param img_show: 是否显示
:return: 分割后的子图像rect列表
"""
img = cv2.imread(img_file, 1)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gray = color_nomal(gray)
# ret, binary = cv2.threshold(gray, threshold_value, 255, cv2.THRESH_BINARY)
h = img.shape[0]
w = img.shape[1]
rate = h // w if h > w else w // h
h_line, v_line = _img_split_with_shadow(gray)
if len(h_line) < 1 and len(v_line) < 1:
h_line, v_line = _img_split_with_hough(gray)
rects = _combine_rect(h_line, v_line, w, h)
split_imgs = []
for rect in rects:
split_imgs.append(img[rect[0]:rect[2], rect[1]:rect[3]])
if img_show:
for rect in rects:
cv2.rectangle(img, (rect[1], rect[0]), (rect[3], rect[2]), (0, 255, 0), 2)
img = cv2.resize(img, (int(h * 0.7), int(h * 0.7 / rate)))
cv2.imshow('cece', img)
cv2.waitKey()
return split_imgs
分割结果


2. 文字方向校正,可以使用FFT变换后校正然后再逆变换回来,也可以直接使用查找包含文字区域的矩形,旋转这个矩形,但是这种方法对于垂直的图像就没效果了,因为会发现包含文字的矩形区域就是方方正正的 不用校正。在二值化的时候采用了自适应二值化,这样做的好处是能更精确的定位文字区域,全局二值化可能会造成有些地方一团黑。
def rotated_img_with_fft(gray):
# 图像延扩
h, w = gray.shape[:2]
new_h = cv2.getOptimalDFTSize(h)
new_w = cv2.getOptimalDFTSize(w)
right = new_w - w
bottom = new_h - h
nimg = cv2.copyMakeBorder(gray, 0, bottom, 0, right, borderType=cv2.BORDER_CONSTANT, value=0)
# 执行傅里叶变换,并过得频域图像
f = np.fft.fft2(nimg)
fshift = np.fft.fftshift(f)
fft_img = np.log(np.abs(fshift))
fft_img = (fft_img - np.amin(fft_img)) / (np.amax(fft_img) - np.amin(fft_img))
fft_img *= 255
ret, thresh = cv2.threshold(fft_img, 150, 255, cv2.THRESH_BINARY)
# 霍夫直线变换
thresh = thresh.astype(np.uint8)
lines = cv2.HoughLinesP(thresh, 1, np.pi / 180, 30, minLineLength=40, maxLineGap=100)
try:
lines1 = lines[:, 0, :]
except Exception as e:
lines1 = []
# 创建一个新图像,标注直线
# lineimg = np.ones(nimg.shape,dtype=np.uint8)
# lineimg = lineimg * 255
piThresh = np.pi / 180
pi2 = np.pi / 2
angle = 0
for line in lines1:
# x1, y1, x2, y2 = line[0]
x1, y1, x2, y2 = line
# cv2.line(lineimg, (x1, y1), (x2, y2), (0, 255, 0), 2)
if x2 - x1 == 0:
continue
else:
theta = (y2 - y1) / (x2 - x1)
if abs(theta) < piThresh or abs(theta - pi2) < piThresh:
continue
else:
angle = abs(theta)
break
angle = math.atan(angle)
angle = angle * (180 / np.pi)
print(angle)
# cv2.imshow("line image", lineimg)
center = (w // 2, h // 2)
height_1 = int(w * fabs(sin(radians(angle))) + h * fabs(cos(radians(angle))))
width_1 = int(h * fabs(sin(radians(angle))) + w * fabs(cos(radians(angle))))
M = cv2.getRotationMatrix2D(center, angle, 1.0)
M[0, 2] += (width_1 - w) / 2
M[1, 2] += (height_1 - h) / 2
rotated = cv2.warpAffine(gray, M, (width_1, height_1), flags=cv2.INTER_CUBIC, borderMode=cv2.BORDER_REPLICATE)
cv2.imshow('rotated', rotated)
cv2.waitKey(0)
return rotated
def rotated_img_with_radiation(gray, is_show=False):
thresh = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY_INV, 11, 2)
if is_show:
cv2.imshow('thresh', thresh)
# 计算包含了旋转文本的最小边框
coords = np.column_stack(np.where(thresh > 0))
# 该函数给出包含着整个文字区域矩形边框,这个边框的旋转角度和图中文本的旋转角度一致
angle = cv2.minAreaRect(coords)[-1]
print(angle)
# 调整角度
if angle < -45:
angle = -(90 + angle)
else:
angle = -angle
# 仿射变换
h, w = gray.shape[:2]
center = (w // 2, h // 2)
print(angle)
M = cv2.getRotationMatrix2D(center, angle, 1.0)
rotated = cv2.warpAffine(gray, M, (w, h), flags=cv2.INTER_CUBIC, borderMode=cv2.BORDER_REPLICATE)
if is_show:
cv2.putText(rotated, 'Angle: {:.2f} degrees'.format(angle), (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 0.7,
(0, 0, 255), 2)
print('[INFO] angel :{:.3f}'.format(angle))
cv2.imshow('Rotated', rotated)
cv2.waitKey()
return rotated

放射校正结果:

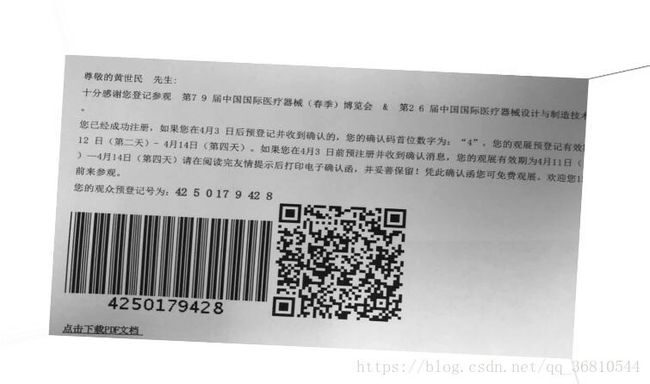
原图:

放射校正:

fft校正,计算的时候有大概2度的误差