基于PCA和LDA的人脸识别
一、系统设计
1.1研究背景及意义
随着信息技术的不断发展,人们对方便快捷的身份验证和识别系统的要求不断提高。人脸识别技术因具有直接、友好、快捷、方便、易为用户所接受等特点,成为了身份验证的最理想依据,也早已成为了模式识别领域研究的热点。众多科研人员通过多年潜心研究,也做出了许多的成果,但是在实际应用中,现有的人脸识别产品大多因识别率不高、稳定性差等缺点无法满足实际需要。
针对这一现状,本文研究了EigenFace、FisherFace两种人脸特征提取算法,在此基础上设计了基于PCA+LDA算法的人脸识别新方案,并对PCA+LDA算法做了改进。同时还对PCA特征子空间的维数与识别率的关系进行了研究。
1.2系统开发环境
软件环境:Windows10
1.3系统使用工具
PyCharm2018.3+Anaconda3+OpenCV
1.4系统功能需求
①人脸检测:调用分类器,将人脸从一张图片中分析并用适当的框架标识出来
②数据库存储:能够根据情况更新人脸数据库中的数据,用于训练;
③人脸识别:能够根据数据库中所存储的人脸信息,识别出输入的未知人脸
④动态识别:通过摄像头的视频捕捉,能够实时地识别出每一帧图像中的人脸图像
- 界面设计:需要设计对程序的输入输出显示的功能进行界面的设计
1.5系统数据设计
数据来源:
- yale人脸数据库:其中共有165张100*100的bmp格式灰度图像,分为15人,每人11张
② 通过调用摄像头自行拍摄的照片,分为2人。每人11张。
二、算法思想
2.1EigenFace特征脸法
EigenFace是基于PCA(主成分分析)的人脸识别算法。PCA(Principal Component Analysis)是一种常用的数据分析方法。PCA通过线性变换将原始数据变换为一组各维度线性无关的表示,可用于提取数据的主要特征分量,常用于高维数据的降维。一般情况下,在数据挖掘和机器学习中,数据被表示为向量。很多机器学习算法的复杂度和数据的维数有着密切关系,甚至与维数呈指数级关联。如果维数较小,也许还无所谓,但是实际机器学习中处理成千上万甚至几十万维的情况也并不罕见,在这种情况下,机器学习的资源消耗是不可接受的,因此我们必须对数据进行降维。
主成分分析(PCA)的原理就是将一个高维向量x,通过一个特殊的特征向量矩阵U,投影到一个低维的向量空间中,表征为一个低维向量y,并且仅仅损失了一些次要信息。也就是说,通过低维表征的向量和特征向量矩阵,可以基本重构出所对应的原始高维向量,如图1。
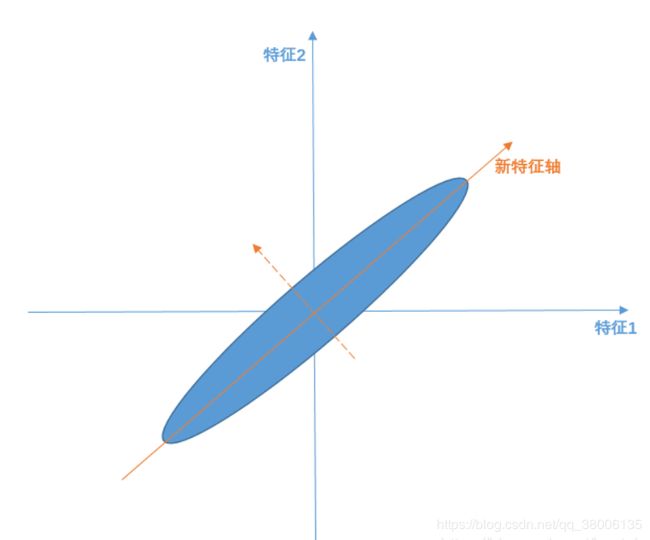
图2-1
在人脸识别中,特征向量矩阵U称为特征脸(EigenFace)空间,因此其中的特征向量ui进行量化后可以看出人脸轮廓。
2.2FisherFace方法
假设有C个人的人脸图像,每个人可以有多张图像,所以按人来分,可以将图像分为C类,这节就是要解决如何判别这C个类的问题。判别之前需要先处理下图像,将每张图像按照逐行逐列的形式获取像素组成一个向量,和第一节类似设该向量为x,设向量维数为n,设x为列向量(n行1列)。这里的n有可能成千上万,比如100x100的图像得到的向量为10000维,所以第一节里将x投影到一个向量的方法可能不适用了,比如图2:

图2-2
平面内找不到一个合适的向量,能够将所有的数据投影到这个向量而且不同类间合理的分开,所以我们需要增加投影向量w的个数。
FisherFace是基于线性判别分析(Linear Discriminant Analysis, 以下简称LDA)。LDA是一种监督学习的降维技术,也就是说它的数据集的每个样本是有类别输出的。这点和PCA不同。PCA是不考虑样本类别输出的无监督降维技术。LDA的思想可以用一句话概括,就是“投影后类内方差最小,类间方差最大”。我们要将数据在低维度上进行投影,投影后希望每一种类别数据的投影点尽可能的接近,而不同类别的数据的类别中心之间的距离尽可能的大。
三、算法实现
3.1EigenFace实现步骤
(1)获取包含M张人脸图像的集合dataMat,每张图转化为一列,将每一列进行合并,转为矩阵,最后得到图像矩阵dataMat。
(2)计算平均图像,对行求均值后得到平均脸矩阵MeanMat,若还原回像素矩阵如图3-1,并获得偏差矩阵。每张人脸都减去这个平均图像,最后得到偏差矩阵diffMat。
![]()
图3-1求均值后得到的平均脸
(3)求协方差矩阵,并计算特征值和特征向量。但是在这里,协方差矩阵的维度过大,无法计算,计算量大且无法储存,因此使用如下的方法:
设 T 是预处理图像的矩阵,每一列对应一个减去均值图像之后的图像。则,协方差矩阵为 ![]() ,并且对 S 的特征值分解为
,并且对 S 的特征值分解为
![]()
然而,![]() 是一个非常大的矩阵。因此,如果转而使用如下的特征值分解
是一个非常大的矩阵。因此,如果转而使用如下的特征值分解
![]()
|
|
![]()
此时,我们发现如果在等式两边乘以T,可得到
![]()
|
|
这就意味着,如果 ui 是![]() 的一个特征向量,则
的一个特征向量,则![]() 是 S 的一个特征向量。
是 S 的一个特征向量。
这里的T 就是偏差矩阵,最后我们得![]() 的一个特征向量,再用T与之相乘就是协方差矩阵的特征向量u。而此时我们求的特征向量每一行如果变成图像大小的矩阵,就可以看做是一个新的人脸,称为特征脸,如图4-2。
的一个特征向量,再用T与之相乘就是协方差矩阵的特征向量u。而此时我们求的特征向量每一行如果变成图像大小的矩阵,就可以看做是一个新的人脸,称为特征脸,如图4-2。
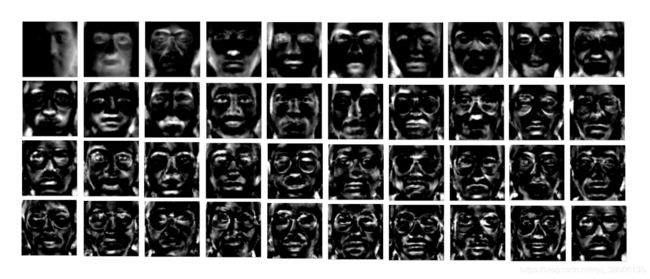
图4-2 特征脸
(4)由于当前问题是小样本问题,即样本维数远远大于样本数,而特征值分解仅适用于方阵,因此这里我们需要用到与特征值分解原理相同,但是适用于任意矩阵特征值的奇异值分解得到协方差矩阵特征向量。
假设我们的矩阵A是一个m×n的矩阵,那么我们定义矩阵
A的SVD为:
其中U是一个m×m的矩阵,Σ是一个m×n的矩阵,除了主对角线上的元素以外全为0,主对角线上的每个元素都称为奇异值,V是一个n×n的矩阵。U和V都是酉矩阵,即满足UTU=I,VTV=I。
(5)主成分分析。在求得的特征向量和特征值中,越大的特征值对于我们区分越重要,也就是我们说的主成分,我们只需要那些大的特征值对应的特征向量,而那些十分小甚至为0的特征值对于我们来说,对应的特征向量几乎没有意义。在这里我们选取的特征向量维数是40维,在大多数应用中,40维已经足够代表样本的特征。
(6) 进行人脸识别。此时我们导入一个新的人脸,我们使用上面主成分分析后得到的特征向量![]() ,来求得一个每一个特征向量对于导入人脸的权重向量
,来求得一个每一个特征向量对于导入人脸的权重向量![]() 。利用求得导入人脸的权重向量与样本集的权重向量的欧氏距离,来判断未知人脸与训练人脸之间的差距。欧氏距离:
。利用求得导入人脸的权重向量与样本集的权重向量的欧氏距离,来判断未知人脸与训练人脸之间的差距。欧氏距离:
3.2FisherFace实现步骤
(1)与PCA类似,得到训练集dataMat及需要降至的维度d(d=classNum-1),减去均值,得到偏差矩阵。
(2)计算类内散度矩阵Sw,Sw定义如下:
其中,
代表类别i的类内散列度,它是一个m×n的矩阵。
(3)计算类间散度矩阵SB,SB定义如下:
代表每个类别到μ距离的加和,Ni代表类别内i的个数classInnum,也就是某个人的人脸图像个数。
(4)投影方向是多维,求每类中心相对于全样本中心的散列度之和,得到:
最后化为:
![]()
同PCA类似,求解矩阵的特征向量,然后取前d个特征值最大的特征向量。
四、算法改进
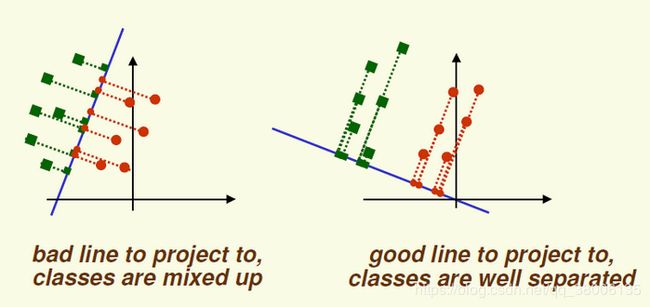
图4-1
通过PCA降维后的数据不能进行分类,与LDA相比缺少一个独立标识每个数据的标签label。做回归时,如果特征太多,会产生不相关特征引入、过度拟合等问题。如图4-1左,PCA所做的只是将整组数据整体映射到最方便这组数据的坐标轴上,映射时没有利用任何数据内部的分类信息。因此,虽然采用了PCA进行降维,整组数据在表示上更加方便(降低了维数并将信息损失降到最低),但在分类上会变得更加困难。如图4-1右,在增加了分类之后,两组输入映射到了另外一个坐标轴上,有了这样一个映射,两组数据之间的就变得更易区分了(在低维上就可以区分,减少了很大的运算量)。
但是,在当前实验中,我们对LDA算法进行了改进,LDA降维采用的数据集并不是原始的照片,而是PCA降维后的值,原因如下:
(1)通过PCA降维后数据量会明显减少,提高程序性能。
(2)多重共线性预测变量之间相互关联,多重共线性空间会导致解空间的不稳定,从而导致结果的不连贯。
(3)高维空间本身具有稀疏性,一维正态分布有68%的值落于正负标准差之间,而在十维空间上只有0.02%,过多的变量会妨碍查找规律的建立。
(4)仅在变量层面上分析可能会忽略变量之间的潜在联系。例如几个预测变量可能落入仅反映数据某一方面特征的一个组内。
五、结果及分析
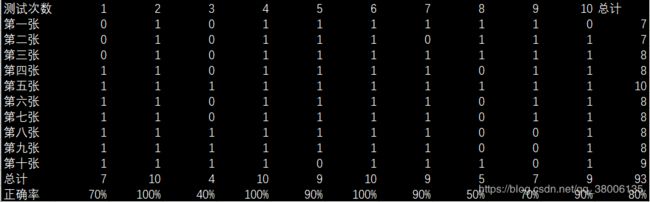
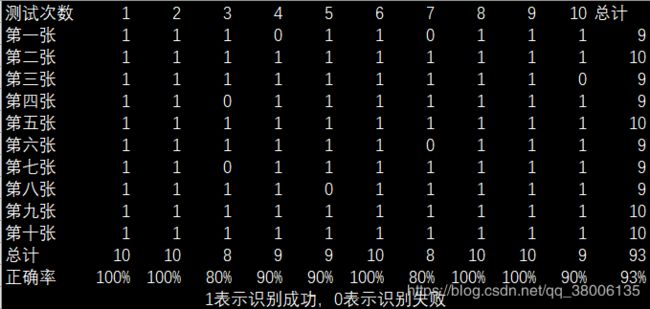
共进行了十次测试,每次用十张新的照片与库中的照片进行比对,最后得到正确率。
5.1EigenFace正确率测试
5.2改进后的FisherFace正确率测试
5.3对比及分析
可以明显看出,改进后的算法正确率要高得多。
但是由于算法本身的限制,如果要得到更准确的结果,对样本的要求较高,光照、人的表情等各个方面都需要考虑,因此我们更换了不同的样本进行测试,来研究样本的选取。
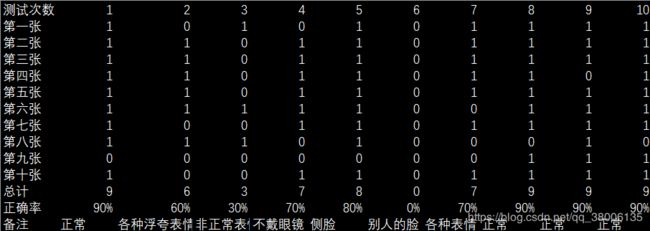
当样本选取正常表情、光照较明亮时,正确率很高;当样本中人脸表情较浮夸,测试时人的表情正常时,准确率较低。因此,样本集应该尽量多地包括到人脸的各种表情及考虑到光照,应该尽量光线明亮。
另外,在降维的维数选择上,我们进行了测试,来判断对当前应用来说,选取多少维是合适的。
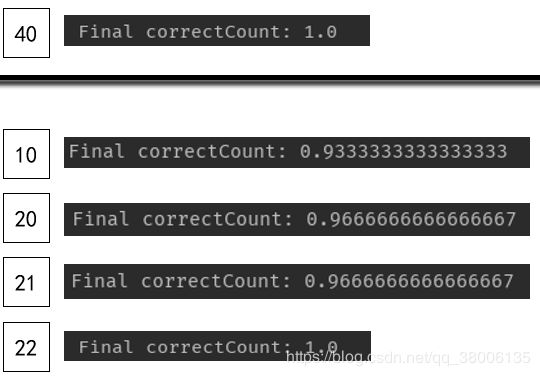
对当前应用来说,维数选取22维已经可以代表特征,但是为了程序的可扩展性,我们还是选取了最佳的40维。
参考文献
[1]Dan Kalman.A Singularly Valuable Decomposition:The SVD of a Matrix·http://www-users.math.umn.edu/~lerman/math5467/svd.pdf
[2]J.R.Parker.图像处理与计算机视觉算法及应用(第2版):清华大学出版社,2012
[3]A Tutorial on Principal Component Analysis·https://www.cs.cmu.edu/~elaw/papers/pca.pdf
[4]周志华.机器学习.清华大学出版社,2016
[5]基于PCA和LDA的人脸识别技术的研究.伍威 李晋惠. http://www.docin.com/p-1385093618.html
github地址:https://github.com/Gonlandoo/Face_Recognition
给个星哟