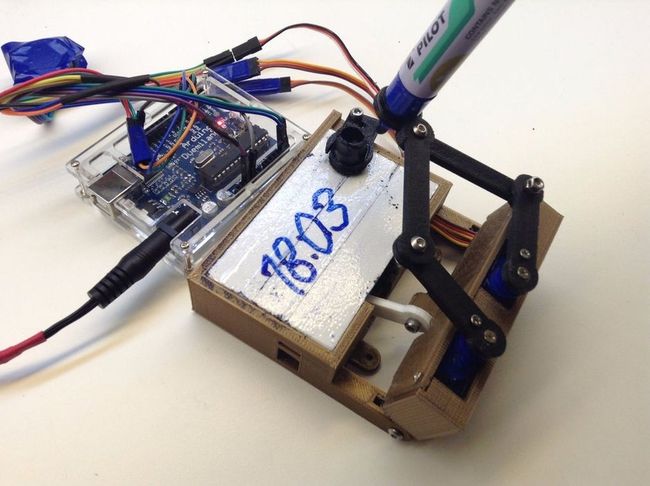
自己写时间的Arduino时钟
源码下载:https://github.com/Lighter-z/PLOT-CLOCK
视频演示:https://www.bilibili.com/video/av34012767/
后面有制作介绍
舵机电路连接

开始校准
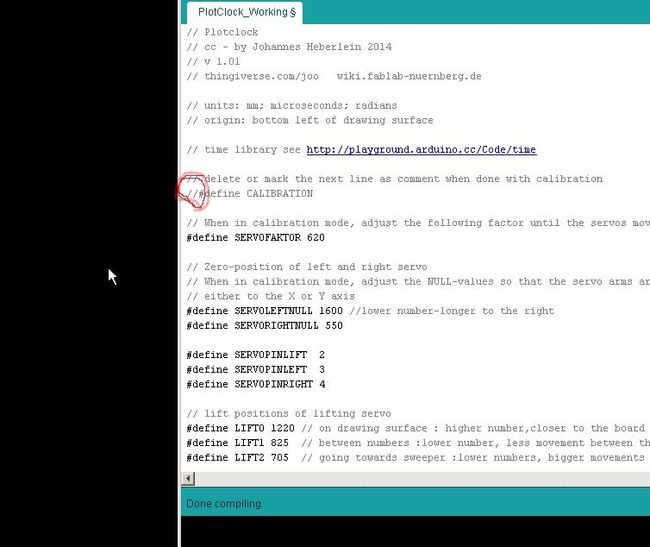
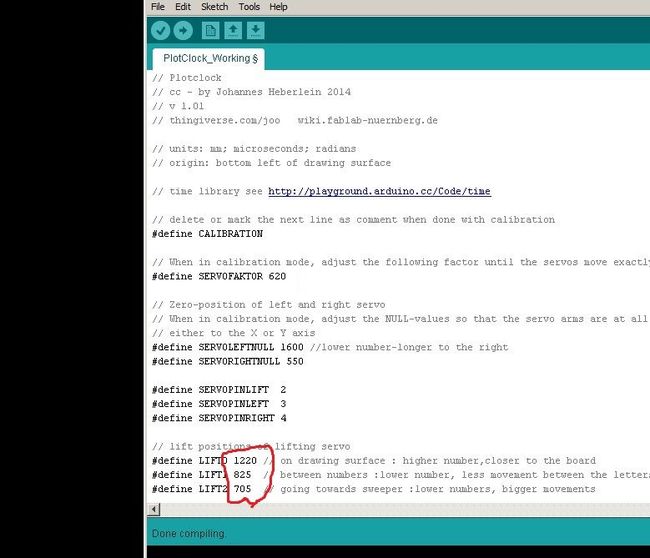

打开 FRTTZ8AIF0XXO9G 文件
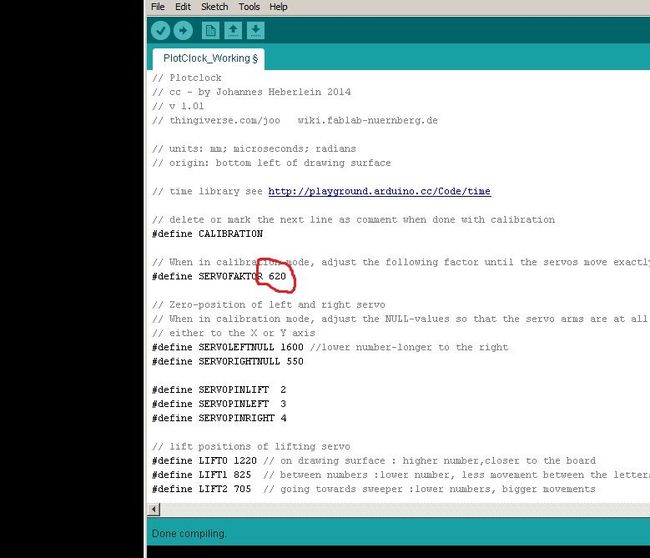
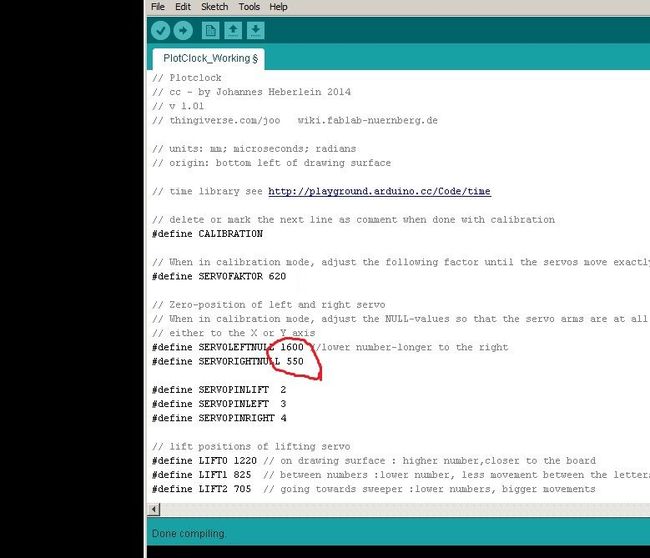
你要调整的是(图中已经标出):
#define SERVOFAKTORLEFT xxx#define SERVOFAKTORRIGHT xxx#define SERVOLEFTNULL xxx#define SERVORIGHTNULL xxx#define LIFT0 xxx#define LIFT1 xxx#define LIFT2 xxx
- 如果增加LIFTx数字,手臂应该靠近平台。
- 如果增加SERVOFAKTORxxx数字,手臂会使用更大的角度
- 如果增加SERVOXXXNULL数字,则伺服停止的点会发生变化
1.通过在#define CALIBRATION前面删除//,将绘图时钟设置为校准模式
2.将一个臂连接到左侧伺服,指向上方,一个臂连接到指向右侧的右侧伺服。不要拧紧螺丝。
3.启动Arduino。手臂会开始往复走动。
4.调整SERVOFAKTOR,使两臂各移动约90度。
5.调整SERVOLEFTNULL和SERVORIGHTNULL,使LEFT手臂从指向左侧移动直到指向上方。并且右手臂指向正向指向右侧。
6.到目前为止对校准感到满意时,将//添加到#define CALIBRATION。这将使代码处于时钟模式。
7.上传到Arduino板。观察所有3个伺服器将向后移动并且像写入时间那样应该没有连接伺服臂。
8.关闭Arduino板的电源,然后安装伺服臂。尝试定位手臂,使笔架在扫地机位置上居中。不要收紧手臂。
9.启动Arduino,观察手臂会做类似于在板上写时间的东西......!
10.检查UP / DOWN伺服是否在字母之间向右移动。如果没有,你必须将其翻过来,并以某种方式将其安装在外壳内。
11.以小增量调整数值:LIFT0,LIFT1,LIFT2,PARKX和PARKY,以获得您喜欢的白板标记移动。
12.当您对校准感到满意时,开始测试
连接DS1307

1.将DS1307RTC文件夹放入Arduino程序位置的库文件夹中。
从DS1307到Arduino板的接线:
GND - GND
VCC - Arduino上的5v
SDA - 模拟引脚4
SCL - 模拟引脚5
2.运行Arduino软件。
2.现在,DS1307RTC库应显示在文件示例-DS1307RTC中
4.在File-Examples-DS1307RTC下,有一个“ReadTest”和一个“SetTime”选项。选择“SetTime”
5.上传到Arduino。记得选择合适的主板和COM端口。
6.上传后,打开Tools-Serial Monitor。(或者ctrl + shift + m)
7.如果模块连接正确,则应读取当前时间。如果这是正确的,那么你就完成了。
8.再次打开Plotclock_modded.ino。删除#define REALTIMECLOCK前面的//
9.时钟现在应使用DS1307RTC模块设置正确的时间。
如果时间和日期错误,请按照下列步骤操作:
1.打开FYIYYMOIF2WL0RM文件,同时连接时钟伺服和DS1307RTC模块。
2.上传到Arduino板。请记住检查正确的电路板和COM端口。
3.打开串行监视器。(CTRL + SHIFT + M)
4.按照说明设置时间和日期。
5.日期和时间现在应该是正确的。
6.再次上传Plot clock Arduino代码以检查时间是否正确。